







1.前言
在嵌入式操作系统中二值型信号量是任务间、任务与中断间同步的重要手段。FreeRTOS的二值型信号量简单易用,下面结合一个具体例子说明FreeRTOS中的二值型信号量如何使用。
二值型信号量的使用方法见图1所示,二值型信号量可以理解为任务与中断间或者两个任务间的标志,该标志非“满”即“空”。Send操作相当把该标志置“满”,Receive操作相关与把该标志取"空",经过send和receive操作实现任务与中断间或者两任务的操作同步。
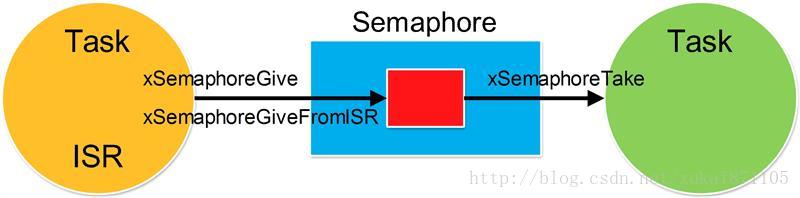
图1 二值型信号量使用示意图
【特别说明】
V7.X版本和V8.X的信号量操作存在少许区别
V7.X版本中使用
vSemaphoreCreateBinary函数,使用该函数创建的信号量初始值为“满”,receive操作立刻有返回。相关代码见文章末尾补充代码1,从补充代码1中可以发现,创建信号量之后立刻调用xSemaphoreGive函数,使得信号量由“空”变“满”。
V8.X版本中使用xSemaphoreCreateBinary函数,使用该函数创建的信号量初始值为“空”,receive操作不会立刻返回。
示例代码具有一个128字节的串口接收缓冲区,在串口中断中把接收到的字符存入缓冲区中,一旦接收到回车换行符(\r\n),便通过xSemaphoreGiveFromISR把信号量置“满”,打印任务中使用xSemaphoreTake实现于中断接收函数的同步,
xSemaphoreTake把任务挂起,一旦查询到信号量为“满”,通过串口打印结束到的内容,并清空缓冲区。
【示例代码】
/* Standard includes. */
#include <stdio.h>
#include <string.h>
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* Library includes. */
#include "stm32f10x.h"
#define LED0_ON() GPIO_SetBits(GPIOB,GPIO_Pin_5);
#define LED0_OFF() GPIO_ResetBits(GPIOB,GPIO_Pin_5);
static void Setup(void);
static void PrintTask(void *pvParameters);
void LedInit(void);
void UART1Init(void);
uint8_t RxBuffer[128];
__IO uint8_t RxCounter = 0;
SemaphoreHandle_t xSemaphore;
int main(void)
{
/* 初始化硬件平台 */
Setup();
/* 创建信号量 */
xSemaphore = xSemaphoreCreateBinary();
/* 建立Print任务 */
xTaskCreate(PrintTask, "Print Task", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY+4, NULL);
/* 启动OS */
vTaskStartScheduler();
return 0;
}
void PrintTask(void *pvParameters)
{
for(;;)
{
if( xSemaphoreTake( xSemaphore, portMAX_DELAY ) == pdTRUE )
{
printf("receive:%s", RxBuffer);
memset(RxBuffer, 0x00, 128);
RxCounter = 0;
}
}
}
static void Setup( void )
{
LedInit();
UART1Init();
}
void LedInit( void )
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
/*LED0 @ GPIOB.5*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOB, &GPIO_InitStructure );
}
void UART1Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 第1步:打开GPIO和USART时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
/* 第2步:将USART1 Tx@PA9的GPIO配置为推挽复用模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 第3步:将USART1 Rx@PA10的GPIO配置为浮空输入模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 第4步:配置USART1参数
波特率 = 9600
数据长度 = 8
停止位 = 1
校验位 = No
禁止硬件流控(即禁止RTS和CTS)
使能接收和发送
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* 第5步:使能 USART1, 配置完毕 */
USART_Cmd(USART1, ENABLE);
/* 清除发送完成标志 */
USART_ClearFlag(USART1, USART_FLAG_TC);
/* 使能USART1发送中断和接收中断,并设置优先级 */
NVIC_InitTypeDef NVIC_InitStructure;
/* 设定USART1 中断优先级 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = configLIBRARY_KERNEL_INTERRUPT_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* 使能接收中断 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
int fputc(int ch, FILE *f)
{
/* 写一个字节到USART1 */
USART_SendData(USART1, (uint8_t) ch);
/* 等待发送结束 */
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET)
{}
return ch;
}
void USART1_IRQHandler(void)
{
static BaseType_t xHigherPriorityTaskWoken;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
RxBuffer[RxCounter++] = USART_ReceiveData(USART1);
if (RxCounter > 2 && RxBuffer[RxCounter-2] == '\r' && RxBuffer[RxCounter-1] == '\n') {
// 在中断中发送信号量
xSemaphoreGiveFromISR( xSemaphore, &xHigherPriorityTaskWoken );
}
}
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
SemaphoreHandle_t xSemaphore;
信号量句柄,二值型信号量、数值型信号量和互斥型信号量均使用
SemaphoreHandle_t类型声明
创建信号量,V8.X版本中新增加函数,创建信号量时初值为“空”。
在中断中发送信号量,以FromISR结尾的函数具有保护功能,如果在任务中发送信号量可使用xSemaphoreGive。
等待信号量,等待时间为最大等待时间,如果信号量为“空”任务会处于挂起状态。
【FromISR】
应使用xSemaphoreGiveFromISR,而不是
xSemaphoreGive。
【中断优先级设置】
串口中断的优先级应该低于configMAX_SYSCALL_INTERRUPT_PRIORITY(191,从另一个角度可以理解为11)设置的最高优先级,本文UART的响应优先级为configLIBRARY_KERNEL_INTERRUPT_PRIORITY(该宏的具体值为15,数值越大优先级越低)。
【main.c】
/* 使能USART1发送中断和接收中断,并设置优先级 */
NVIC_InitTypeDef NVIC_InitStructure;
/* 设定USART1 中断优先级 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = configLIBRARY_KERNEL_INTERRUPT_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
【FreeRTOSConfig.h】
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
鉴于Cortex M3的NVIC的特性,请详细参考——【
在Cortex M3平台上运行FreeRTOS】
【1】V8.X中使用
xSemaphoreCreateBinary()
创建的信号量初始值为"空"。
【2】中断中发送信号量尽量使用XXXXFromISR。
【3】某中断的优先级数值应大于configMAX_SYSCALL_INTERRUPT_PRIORITY。
【
补充代码1
】——vSemaphoreCreateBinary函数实现代码
#define vSemaphoreCreateBinary( xSemaphore ) \
{ \
( xSemaphore ) = xQueueGenericCreate( ( unsigned portBASE_TYPE ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE ); \
if( ( xSemaphore ) != NULL ) \
{ \
( void ) xSemaphoreGive( ( xSemaphore ) ); \
} \
}















 703
703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









