







 本文介绍了如何利用摄像头和激光笔构建一个简易测距装置。通过摄像头捕捉激光束在图像中的最亮点,结合图像处理技术,计算Y轴像素差以估算物体距离。原理基于摄像头与激光发射器的垂直距离h作为常量。
本文介绍了如何利用摄像头和激光笔构建一个简易测距装置。通过摄像头捕捉激光束在图像中的最亮点,结合图像处理技术,计算Y轴像素差以估算物体距离。原理基于摄像头与激光发射器的垂直距离h作为常量。
如何用摄像头来测距(opencv)
作者:郭世龙
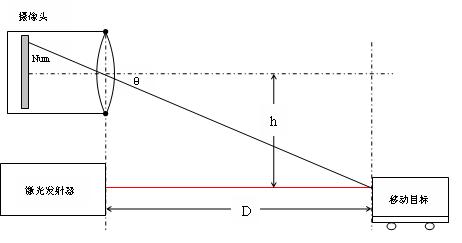
最近一直忙着找工作,blog都长草了,今天把以前作的一个东西放上来充充门面吧。记得在哪看到过老外做的这个东西,觉得很好玩,就自己也做了一个。在摄像头下面固定一个激光笔,就构成了这个简易的测距装置。看一下图吧。


原 理
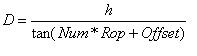
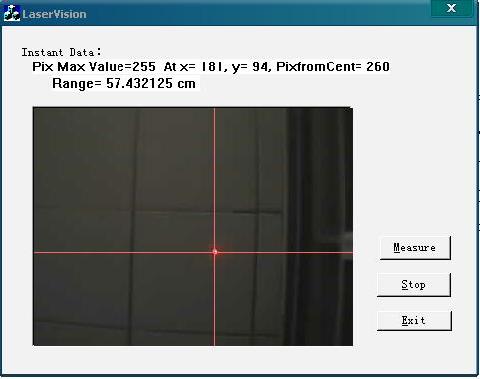
假设激光束是与摄像头的光轴完全平行,激光束的中心落点在在摄像头的视域中是最亮的点。激光束照射到摄像头视域中的跟踪目标上,那么摄像头可以捕捉到这个点,通过简单的图像处理的方法,可以在这侦图像中找到激光束照射形成的最亮点,同时可以计算出Y轴上方向上从落点到图像中心的象素的个数。这个落点越接近图像的中心,被测物体距离机器人就越远。由下图图可以计算距离D:
 (1)
(1)
等式中h是一个常量,是摄像头与激光发射器之间的垂直距离,可以直接测量获得。
θ可通过下式计算:
θ=Num*Rop+Offset (2)
其中:Num是从图像中心到落点的像素个数
Rop是每个像素的弧度值
Offset是弧度误差
合并以上等式可以得到:
 (3)
(3)
Num可以从图像上计算得到。Rop和Offset需要通过实验计算获得。首先测量出D的准确值,然后根据等式(1)可以计算出准确的θ,根据等式(2)可到只含有参数Rop和Offset的方程。在不同的距离多次测量D的准确值计算θ,求解方程组可以求出Rop和Offset。这里Rop=0.0030354,Offset=0.056514344。
程 序
头文件:
class LaserRange
{
public:
struct RangeResult * GetRange(IplImage * imgRange,IplImage * imgDst);
LaserRange();
virtual ~LaserRange();
{
public:
struct RangeResult * GetRange(IplImage * imgRange,IplImage * imgDst);
LaserRange();
virtual ~LaserRange();
private:
unsigned int maxW;
unsigned int maxH;
unsigned int MaxPixel;
RangeResult * strctResult;
// Values used for calculating range from captured image data
const double gain;
unsigned int maxW;
unsigned int maxH;
unsigned int MaxPixel;
RangeResult * strctResult;
// Values used for calculating range from captured image data
const double gain;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









