







在上一篇文章对Camera API2.0的框架进行了简单的介绍,其中Camera HAL屏蔽了底层的实现细节,并且为上层提供了相应的接口,具体的HAL的原理,个人觉得老罗的文章Android硬件抽象层(HAL)概要介绍和学习计划分析的很详细,这里不做分析,本文将只分析Camera HAL的初始化等相关流程。
以下是Camera2的相关文章目录:
android6.0源码分析之Camera API2.0简介
android6.0源码分析之Camera2 HAL分析
android6.0源码分析之Camera API2.0下的初始化流程分析
android6.0源码分析之Camera API2.0下的Preview(预览)流程分析
android6.0源码分析之Camera API2.0下的Capture流程分析
android6.0源码分析之Camera API2.0下的video流程分析
Camera API2.0的应用
1、Camera HAL的初始化
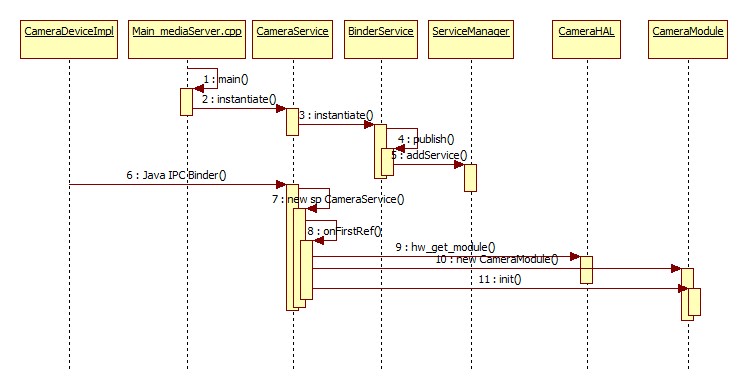
Camera HAL的初始加载是在Native的CameraService初始化流程中的,而CameraService初始化是在Main_mediaServer.cpp的main方法开始的:
//Main_mediaServer.cpp
int main(int argc __unused, char** argv){
…
sp<ProcessState> proc(ProcessState::self());
//获取ServieManager
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
AudioFlinger::instantiate();
//初始化media服务
MediaPlayerService::instantiate();
//初始化资源管理服务
ResourceManagerService::instantiate();
//初始化Camera服务
CameraService::instantiate();
//初始化音频服务
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
//初始化Radio服务
RadioService::instantiate();
registerExtensions();
//开始线程池
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}其中,CameraService继承自BinderService,instantiate也是在BinderService中定义的,此方法就是调用publish方法,所以来看publish方法:
// BinderService.h
static status_t publish(bool allowIsolated = false) {
sp<IServiceManager> sm(defaultServiceManager());
//将服务添加到ServiceManager
return sm->addService(String16(SERVICE::getServiceName()),new SERVICE(), allowIsolated);
}这里,将会把CameraService服务加入到ServiceManager进行管理。
而在前面的文章android6.0源码分析之Camera API2.0简介中,需要通过Java层的IPC Binder来获取此CameraService对象,在此过程中会初始CameraService的sp类型的对象,而对于sp,此处不做过多的分析,具体的可以查看深入理解Android卷Ⅰ中的第五章中的相关内容。此处,在CameraService的构造时,会调用CameraService的onFirstRef方法:
//CameraService.cpp
void CameraService::onFirstRef()
{
BnCameraService::onFirstRef();
...
camera_module_t *rawModule;
//根据CAMERA_HARDWARE_MODULE_ID(字符串camera)来获取camera_module_t对象
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
//创建CameraModule对象
mModule = new CameraModule(rawModule);
//模块初始化
err = mModule->init();
...
//通过Module获取Camera的数量
mNumberOfCameras = mModule->getNumberOfCameras();
mNumberOfNormalCameras = mNumberOfCameras;
//初始化闪光灯
mFlashlight = new CameraFlashlight(*mModule, *this);
status_t res = mFlashlight->findFlashUnits();
int latestStrangeCameraId = INT_MAX;
for (int i = 0; i < mNumberOfCameras; i++) {
//初始化CameraID
String8 cameraId = String8::format("%d", i);
struct camera_info info;
bool haveInfo = true;
//获取Camera信息
status_t rc = mModule->getCameraInfo(i, &info);
...
//如果Module版本高于2.4,找出冲突的设备参数
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_4 && haveInfo) {
cost = info.resource_cost;
conflicting_devices = info.conflicting_devices;
conflicting_devices_length = info.conflicting_devices_length;
}
//将冲突设备加入冲突set集中
std::set<String8> conflicting;
for (size_t i = 0; i < conflicting_devices_length; i++) {
conflicting.emplace(String8(conflicting_devices[i]));
}
...
}
//如果Module的API大于2.1,则设置回调
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_1) {
mModule->setCallbacks(this);
}
//若大于2.2,则设置供应商的Tag
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_2) {
setUpVendorTags();
}
//将此服务注册到CameraDeviceFactory
CameraDeviceFactory::registerService(this);
CameraService::pingCameraServiceProxy();
}onFirstRef方法中,首先会通过HAL框架的hw_get_module来获取CameraModule对象,然后会对其进行相应的初始化,并会进行一些参数的设置,如camera的数量,闪光灯的初始化,以及回调函数的设置等,到这里,Camera2 HAL的模块就初始化结束了,下面给出初始化时序图:
2、Camera HAL的open流程分析
通过阅读android6.0源码发现,它提供了高通的Camera实现,并且提供了高通的Camera库,也实现了高通的Camera HAL的相应接口,对于高通的Camera,它在后台会有一个守护进程daemon,daemon是介于应用和驱动之间翻译ioctl的中间层(委托处理)。本节将以Camera中的open流程为例,来分析Camera HAL的工作过程,在应用对硬件发出open请求后,会通过Camera HAL来发起open请求,而Camera HAL的open入口在QCamera2Hal.cpp进行了定义:
//QCamera2Hal.cpp
camera_module_t HAL_MODULE_INFO_SYM = {
//它里面包含模块的公共方法信息
common: camera_common,
get_number_of_cameras: qcamera::QCamera2Factory::get_number_of_cameras,
get_camera_info: qcamera::QCamera2Factory::get_camera_info,
set_callbacks: qcamera::QCamera2Factory::set_callbacks,
get_vendor_tag_ops: qcamera::QCamera3VendorTags::get_vendor_tag_ops,
open_legacy: qcamera::QCamera2Factory::open_legacy,
set_torch_mode: NULL,
init : NULL,
reserved: {
0}
};
static hw_module_t camera_common = {
tag: HARDWARE_MODULE_TAG,
module_api_version: CAMERA_MODULE_API_VERSION_2_3,
hal_api_version: HARDWARE_HAL_API_VERSION,
id: CAMERA_HARDWARE_MODULE_ID,
name: "QCamera Module",
author: "Qualcomm Innovation Center Inc",
//它的方法数组里绑定了open接口
methods: &qcamera::QCamera2Factory::mModuleMethods,
dso: NULL,
reserved: {
0}
};
struct hw_module_methods_t QCamera2Factory::mModuleMethods = {
//open方法的绑定
open: QCamera2Factory::camera_device_open,
};Camera HAL层的open入口其实就是camera_device_open方法:
// QCamera2Factory.cpp
int QCamera2Factory::camera_device_open(const struct hw_module_t *module, const char *id,
struct hw_device_t **hw_device){
...
return gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);
}</ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 417
417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









