







灰度传感器的使用
上篇给大家介绍了非标机器人设计思想的机械设计部分,没有看的同学可以点击 机械设计思想 前去查看。
在大学里做过几次非标组别的机器人,看着机器人按照自己的思想在擂台上运动,很有成就感。出于对机器人的热爱,后来在淘宝上开了一家网店,专卖自己设计的机器人配件,于是认识很多全国各地高校机器人领域的朋友,有很多同学聊天第一句话就是要我比赛时的程序,个人觉得我的程序写的很水,也往群文件里上传了,我对这些同学都说了同样话,非标机器人之间差异很大,机械上设计的不一样,传感器布局上的不一样,都会导致程序的不同。个人觉得盲目的看别人的程序会扰乱自己的思维,按照自己的想法去做,才能锻炼自己的思维。有很多同学购买了我们的产品,在这里对支持KXCT的同学说一声谢谢。在交流的过程中我发现各个高校实验室上届对下届知识的传承做的不是太好,好多新手来找我讨论该怎么做,说自己学长考研去了或者找工作去了,那实验室每一年都是重复而不能有太大的进步,希望大家做完比赛了写一个说明文档,把自己的研究成果留给后来人做参考。鉴于广大同学的情况,我在这里分享下我做非标时简单的设计思想,以抛砖引玉。
今天主要讲讲灰度传感器的使用。
一、传感器的了解
非标常用检测擂台边缘的传感器常见有两种,如下:

1、漫反射红外接近开关

2、灰度传感器
两者有什么优缺点呢?
①漫反射红外接近开关
优点:有效检测距离长,通过调节固定的角度可以在机器人没有达到擂台边缘前,提前检测到擂台边缘。
缺点:体积大,怕反光,怕黑色,如果对手是黑色或者反光,很容易误判断擂台边缘,造成不攻自破的结果。
②灰度传感器
优点:体积小,可以通过判断擂台的颜色得出机器人距离擂台边缘的距离,固定在机器人底部,碰到反光对手不会误判擂台边缘
缺点:有效检测距离比较短
不管用哪个类型的传感器控制思想是差不多的,以灰度传感器为例
灰度传感器又分数字灰度和模拟灰度两种,区别如下
①模拟灰度传感器可以实时的检测机器人下方擂台的颜色,单片机根据读取的AD值进行分段处理,从而可以判断出机器人在什么位置。单片机必须有相关的程序配置和处理。
②数字灰度传感器只能返回两个状态,到达或者没到达,判定标准通过电位器调节。单片机只需读取IO状态即可,程序编写简单。
可以看出,用1个模拟传感器就可以判断机器人在擂台上的位置,但是无法判断机器人走向与擂台边缘的角度,这个角度会影响到机器人遇到擂台边缘返回擂台中心的路径。如果用数字传感器就可以解决这个问题,但是必须得用多个才能判断出来。
二、传感器的固定
使用数字灰度的同学很多这样固定的传感器
这种固定方式可以判断出机器人的走向与擂台边缘的角度关系,但是如果想再细化点控制都不太好做到,比如下面这种场景

上图是擂台的图纸,我把它简单的划分成AB两个区域,在A区域里机器人可以可劲的造,想怎么折腾就怎么折腾,我们叫做安全区,在B区域里就要悠着点啦,要分碰到对手的时候和没有检测到对手的时候两种情况,不管是哪一种都不能掉以轻心,我们叫做雷区,那四角的传感器固定法就不太好识别这种情况了,建议在机器人最中间加一个灰度传感器。
三、机器人与擂台边缘的几种关系
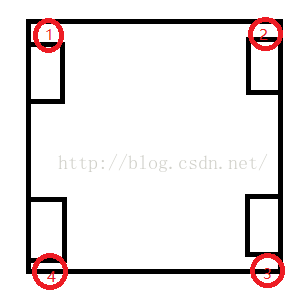
我画了几幅图作为示例,先给大家说下图例,下面这个是我画的机器人的模型,设计上前后是对称的也就是不分前后,白色①②③④代表的是灰度传感器固定的位置,为了描述理解,我们约定其中①②的一侧为机器人的前部,那么③④也就是机器人的后部了

机器人模型
机器人的走向与擂台边缘的夹角可以说是随机的,不太容易控制,其中几个比较有代表性的可能性如下
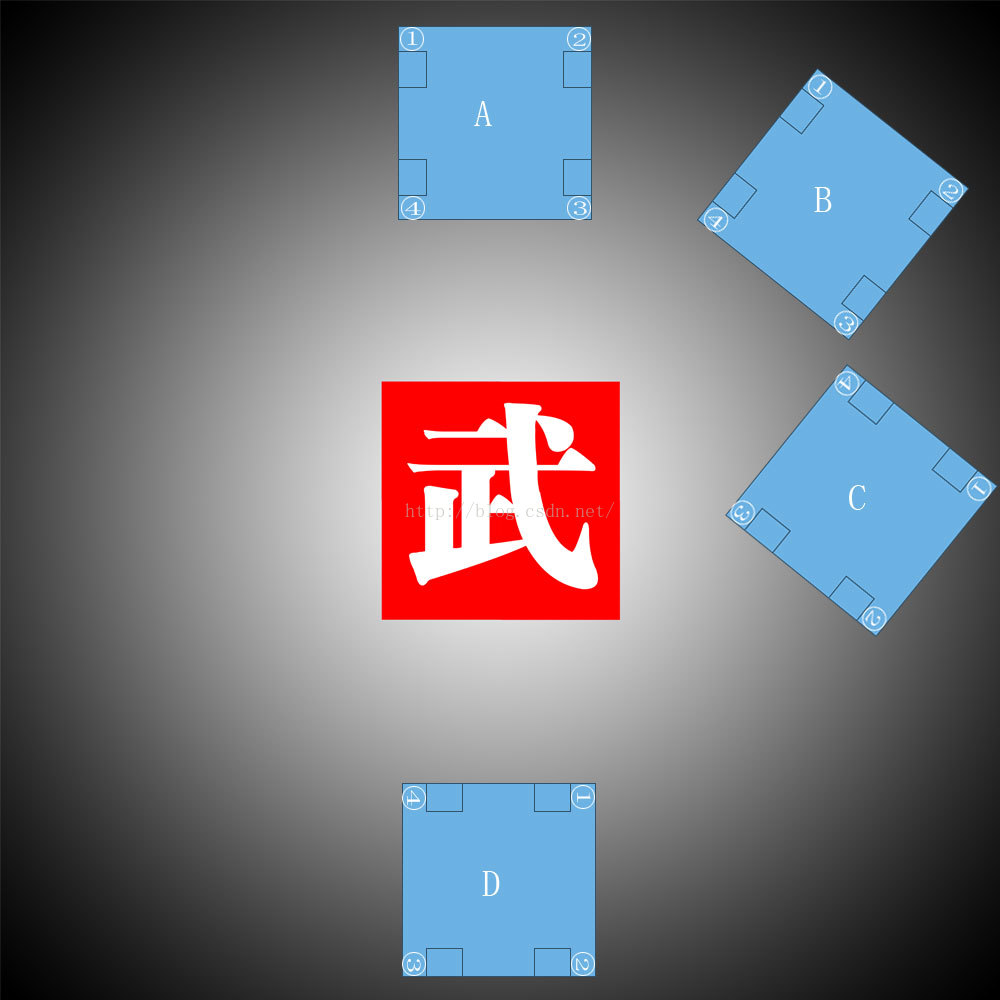
上图总共画出了ABCD四种机器人与擂台边缘的情况,其中A和D不是同一种哦。因为机器人是前后对称的,所以A情况又可以分为前部(①②面)靠近擂台边缘和后部(③④面)靠近擂台边缘两种情况,但是程序的处理方法却可以一样。B情况可以分为①②、③④、①④、②③靠近擂台角落的情况。C情况可以分为①、②、③、④先检测到擂台边缘。D情况可以分为①④、②③两种情况。我们可以发现,机器人和擂台边缘的情况有很多种,稍微考虑少一种都会出现漏洞,这个时候就凸显前后对称和左右对称设计的优势了,情况处理上的工作直接减少一半。在实际调试中发现,出现以上几种情况的概率确实不是太高,所以我们还需要设计机器人在擂台上的路径(在没有遇到敌方的时候),路径有很多种控制方法,在这里举两个例子简单说明下原理。
请看下图
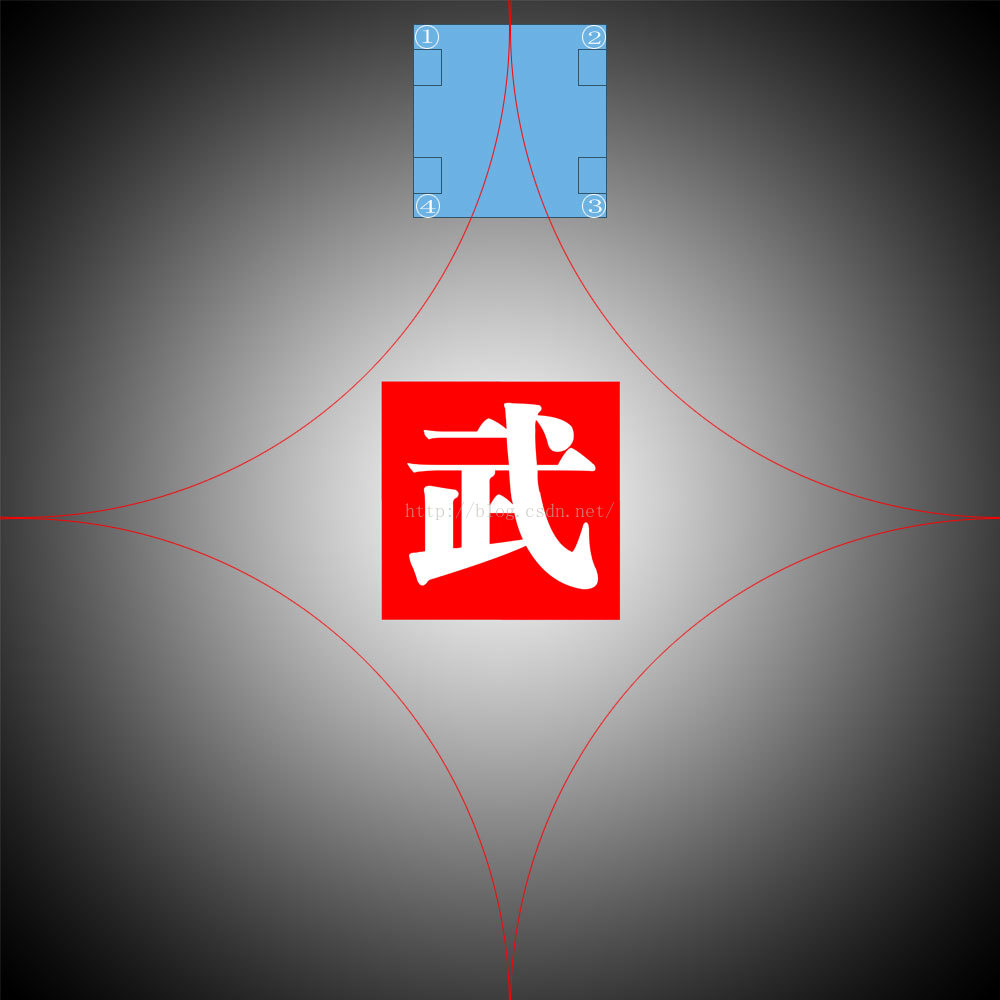
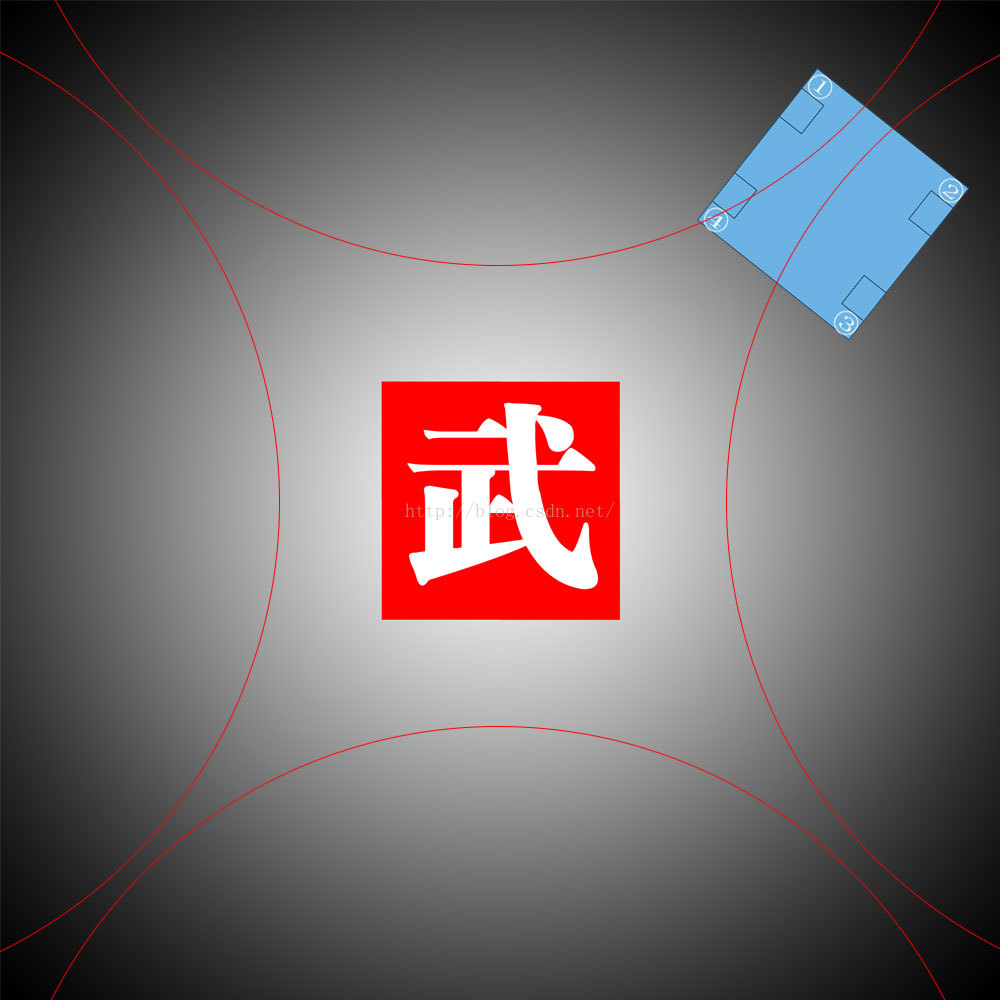
上面两幅图上的红色细线代表机器人的行走路线(没有遇到敌方的时候),可以选择让机器人顺时针或者逆时针依次行走四条红线,行走路径的半径可以通过控制两侧轮子的差速进行调整,保证一圈下来机器人可以把擂台表明检测一遍,这样就可以大大的增加我之前说的那几种机器人与擂台边缘的情况的可能性。当遇到地方的时候中断这种巡台路线,进行攻击,攻击策略之后会专门讲解,消灭敌方后,机器人会逐渐恢复之前的巡台路线。大家可以尝试下其他的巡台路径,可以把实验结果在下方评论分享给大家。
至此传感器篇讲解的差不多了,可能描述的不是太详细,当然我讲的只是示例原理,还需要大家进行实际调试,欢迎大家评论。
最后请允许我插入一则广告,本人开的网店:KXCT雷電科技 主要经营机器人和智能车相关的灰度传感器和直流电机以及直流电机驱动等相关配件,欢迎大家前来选购和交流。
淘宝店铺链接:https://shop128260623.taobao.com/?spm=2013.1.1000126.d21.tDinKz














 8732
8732











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









