







在人眼区域分割(1)中,对人脸图片求水平投影曲线(也叫IPF),其反映的是每行像素和的变化曲线,即反应了整体的灰度变化,并没有反映眼睛局部灰度变化明显的特点,所以在曲线中不能唯一而又准确的显示眼睛的位置,若想找到眼睛,则必须要良好的滤波。对于此,采用了其他的投影方法,并通过该曲线来截取人眼区域。
目录:
一、梯度积分投影
其实我们用sobel算子计算人脸水平梯度图像,很容易发现,眼睛这一区域局部灰度变化明显。这也从侧面验证了计算梯度图的投影曲线的正确性。首先我们生成尺度不变行梯度算子,用该算子与图像进行卷积运算,再对图像进行水平投影计算。- 生成尺度不变梯度算子
L = r o u n d ( n / 100 ) ∗ 2 + 1 L=round(n/100)*2+1 L=round(n/100)∗2+1
其中n是图像的宽度,L为该算子的长度,该算子的形式为下:
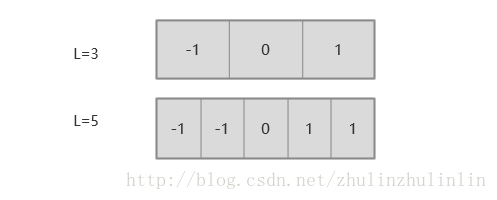
尺度不变梯度算子长度应该跟随图片的宽度而变化,即图片宽度除以的数字是可以改变的,例如图片宽度不足100,则可除以10,再乘以2加1。
- 卷积运算
用该算子与图片进行卷积运算,注意遍历图像进行计算时行列的初始值
代码:
//卷积,卷积后的梯度图片保存到test中
int border = len / 2;//len为尺度不变行梯度算子的长度
Mat test(Gauss.size(), Gauss.type(), Scalar(0));
uchar *t = test.data;
uchar *g = Gauss.data;
int step = Gauss.step[0];
double sum = 0;
for (int i = 0; i < rows; i++)
{
for (int j = border; j < cols - border; j++)
{
sum = 0;
for (int k = -border; k <= border; k++)
{
sum += Scale[border+k] * g[i*step + j+k];
}
//一定要做饱和处理
if (sum > 255)sum = 255;
if (sum < 0)sum = 0;
t[i*step + j] = sum;
}
}
结果图:从图片也可以看出,水平方向上眼睛梯度值较大而且滤去了眉毛的影响。

3 计算水平灰度曲线
// 这里计算了上半张图的投影曲线(rows/2)
vector<int>curve(rows / 2);
for (int i = 0; i < rows / 2; i++)
{
curve[i] = 0;
for (int j = 0; j < cols; j++)
{
uchar *p = test.data + i*test.step[0] + j;
curve[i] += *p;
}
}
二、分析投影曲线
- 画出该投影曲线


三、人眼区域分割
- 对eyePos向前向后求波谷,可以确定人眼区域的上下部分,如下图

note:求波谷前可对曲线进行滤波
同时注意曲线波谷的求法,因为曲线显示在图片时经过缩放了,但实则曲线可能在波谷是尖锐的点,即用一阶导为0,二阶导为正的方法不能正确的找到我们期待的波谷,因为在尖锐处的点是没有导数的。
//利用简单的数值比较方法寻找波谷
for (int i = eyePosx; i < curve.size()-1; i++)
{
if (curve[i - 1]>curve[i] && curve[i + 1]>curve[i])
{
range2 = i;
break;
}
}
2.区域分割
若所获得人脸图片大部分包含人脸,则只需要截取上图中绿色横线包含的区域,若图像中不包含大部分人脸,可以对图片求取肤色部分,然后进行二值化求取轮廓,其中最大的轮廓就为人脸的轮廓,如下图其中红色方框与绿色坐标的相交部分即为人眼区域。如下图所示:



















 2900
2900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









