






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
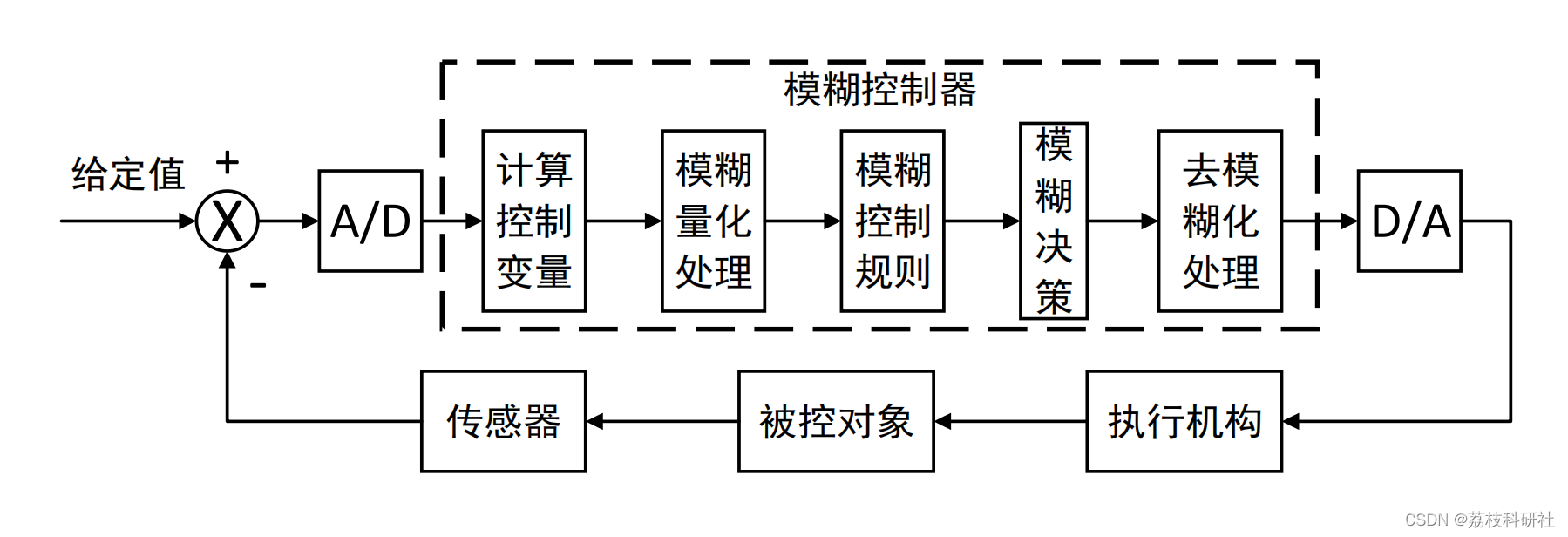
模糊控制(Fuzzy Control)是 1965 年,由美国的 Zadeh 率先创立了模糊集合论,后来又提出了模糊逻辑控制器的概念和有关定理。于 1974 年第一次组成了模糊逻辑控制器,并使用于锅炉和汽轮机的控制系统中。模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的现代智能控制技术。模糊控制是根据经验建立模糊规则,再把传感器接收的实时信息加以模糊化,进而将模糊化后的信息加以模糊推理,将模糊推理后的信息清晰化后加到执行器上,此过程就完成了模糊控制的流程。模糊控制的基本原理图如图 所示:
模糊 RBF 神经网络,是模糊控制系统和 RBF 神经网络的结合。由于模糊系统的设计存在主观性,模糊控制的设计都是基于对专业人员实际经验的认识基础上的,所以把神经网络的能力融入到模糊系统中,使用分布式计算的神经网络表达,达到了模糊控制系统的自组织、自学习的效果。在模糊 RBF 神经网络中,神经网路的输入、输出层节点用于表达模糊系统的输入、输出信息,而神经网络的隐含层节点则用于表达隶属度函数和模糊规律。

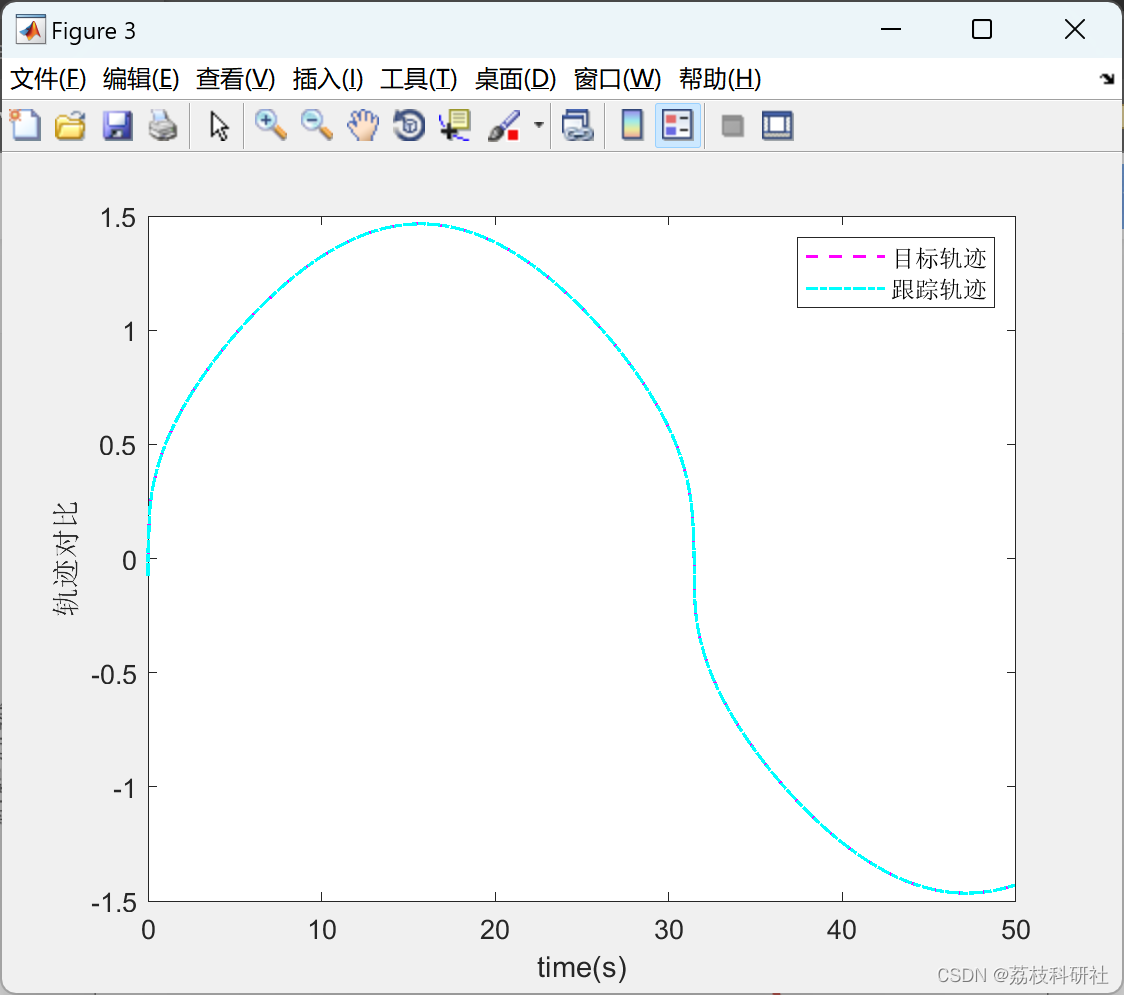
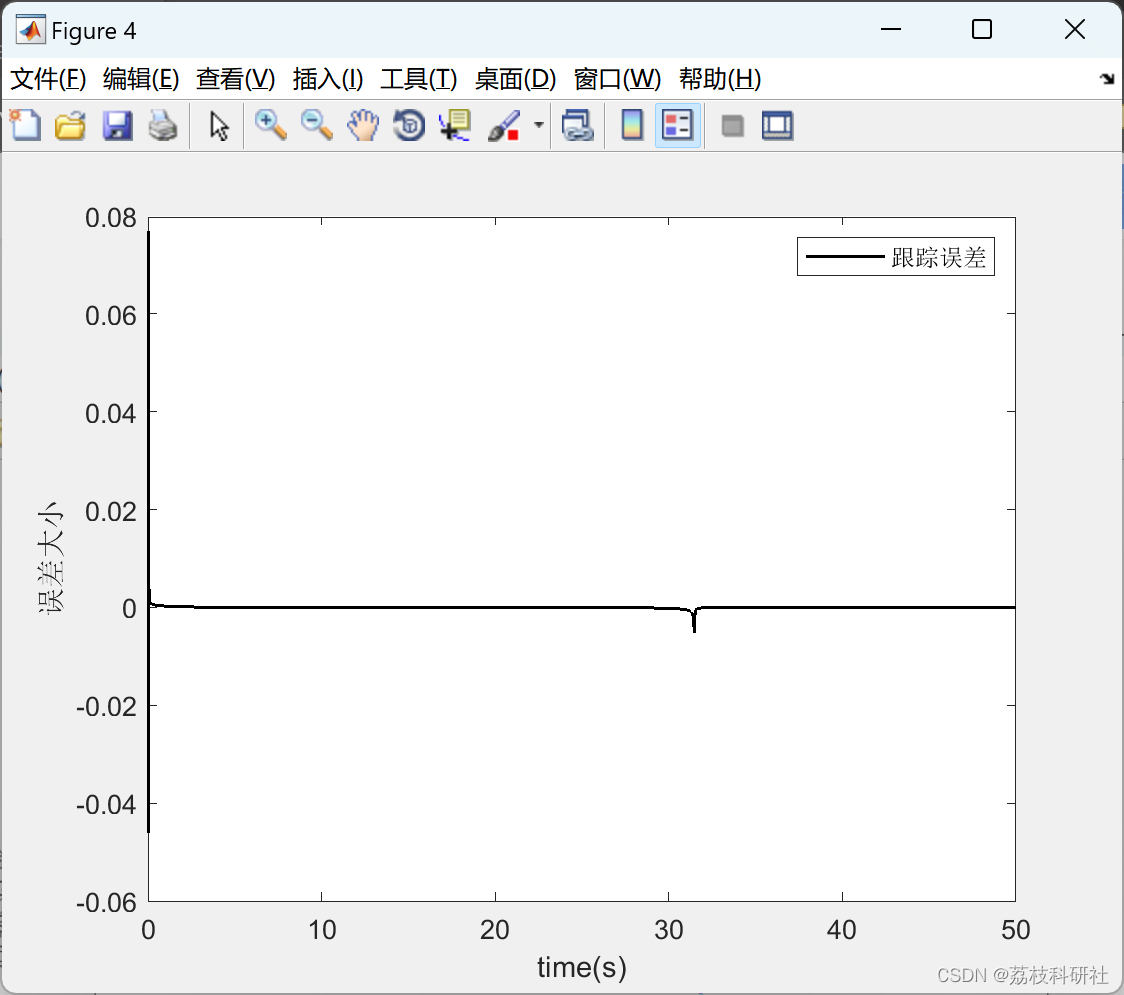
📚2 运行结果


🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]吴秋霞. 基于模糊神经网络的移动机器人轨迹跟踪控制的研究[D].厦门大学,2017.
[2]高健. 基于模糊RBF神经网络的花椒采摘机器人控制系统的设计与实现[D].兰州理工大学,2022.DOI:10.27206/d.cnki.ggsgu.2022.001293.


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









