



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
用于计算系统状态的卡尔曼最优增益和最小均方误差(MMSE)估计研究文档
一、引言
卡尔曼滤波器(Kalman Filter)是一种基于递推的最优估计算法,通过最小化均方误差(MMSE)准则,在动态系统中实现系统状态的最优估计。其核心在于计算卡尔曼最优增益(Kalman Gain),平衡预测值与观测值的权重,从而在噪声干扰下获得高精度状态估计。本文从理论推导、计算流程到实际应用,全面分析卡尔曼最优增益与MMSE估计的机制。
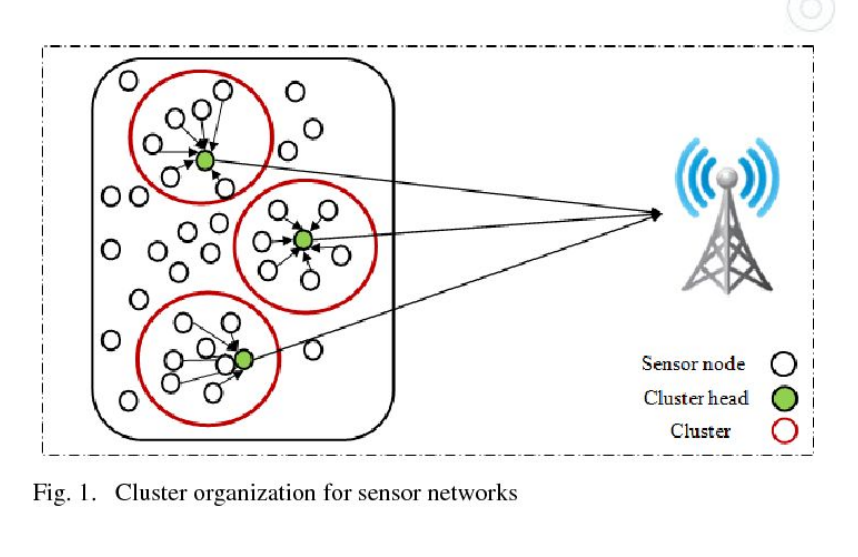
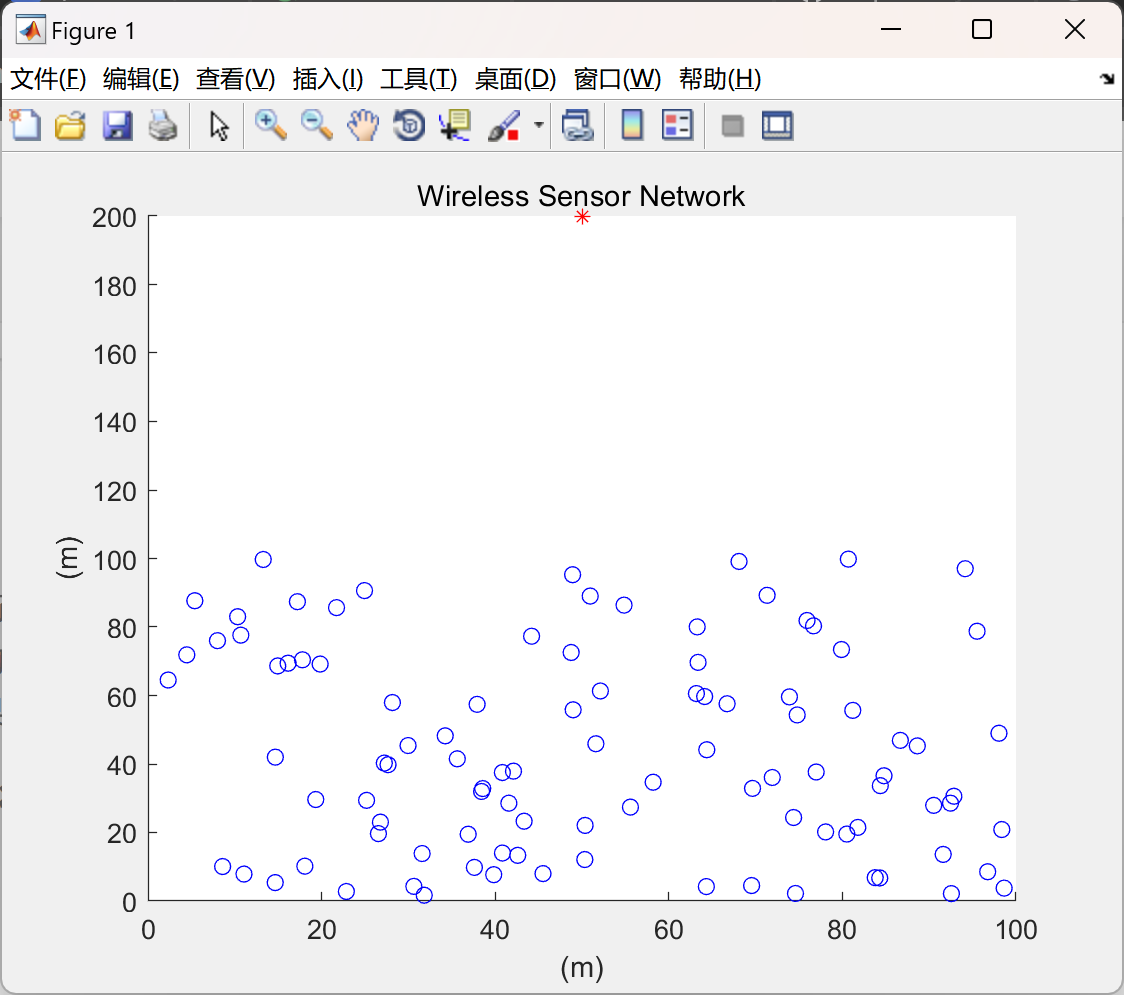
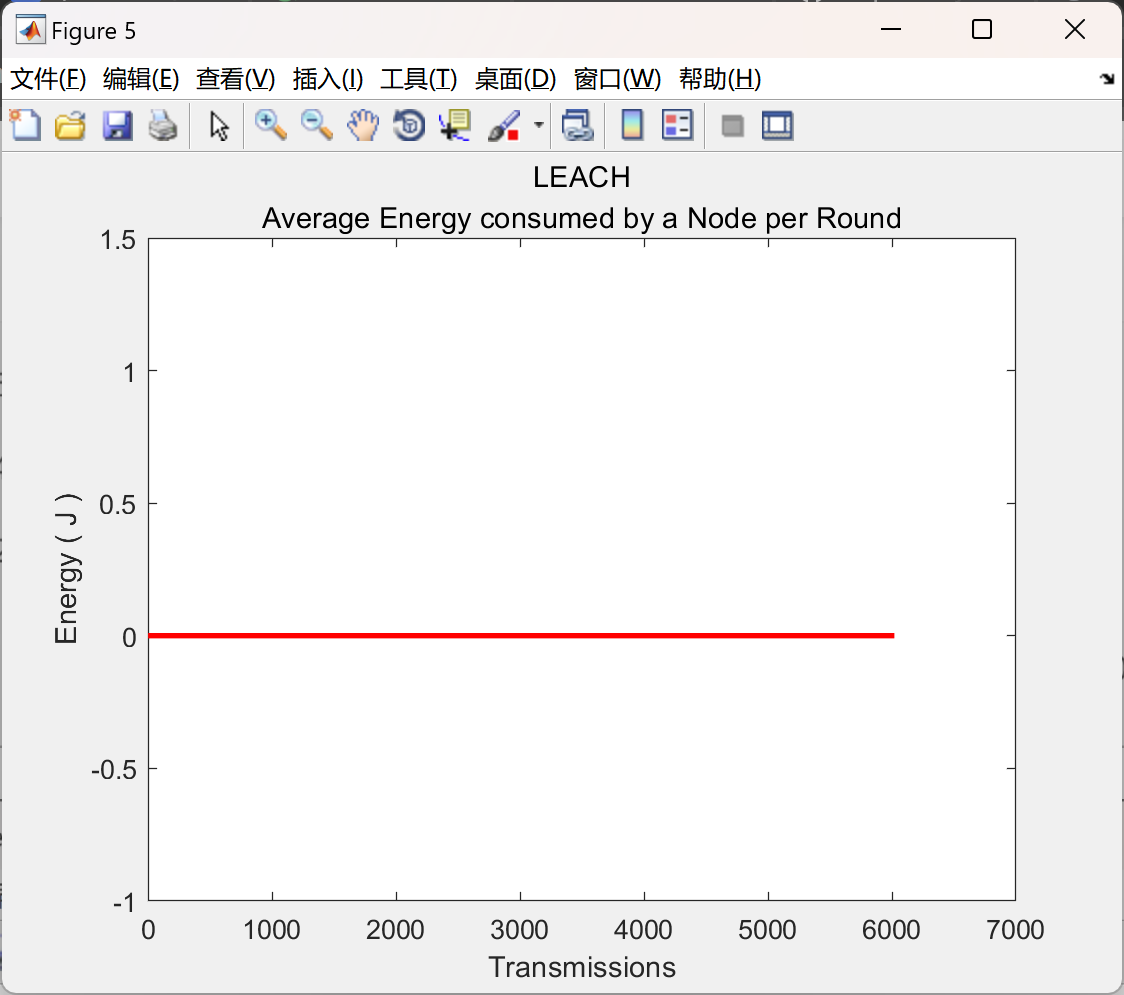
低能耗自适应集群层次(LEACH)协议是一种基于时分多址(TDMA)的介质访问控制(MAC)协议。该协议的主要目标是通过降低创建和维护集群头节点所需的能量消耗来提高无线传感器网络的寿命。
LEACH协议的运行包括多个轮次,每个轮次都有两个阶段:设置阶段和稳定阶段。
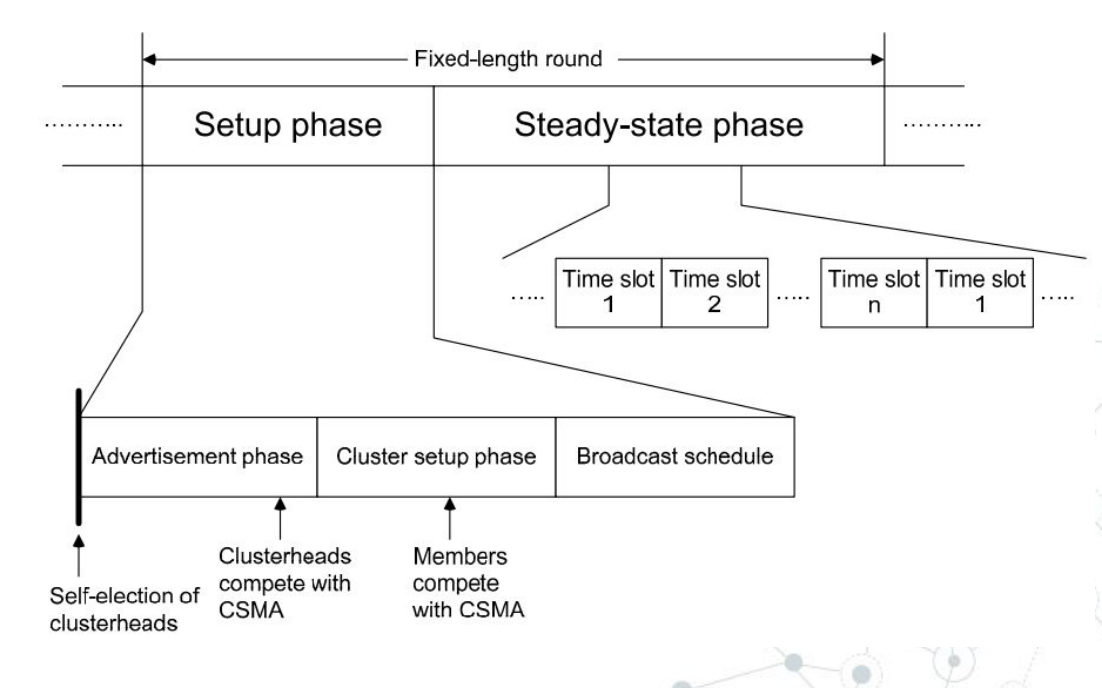
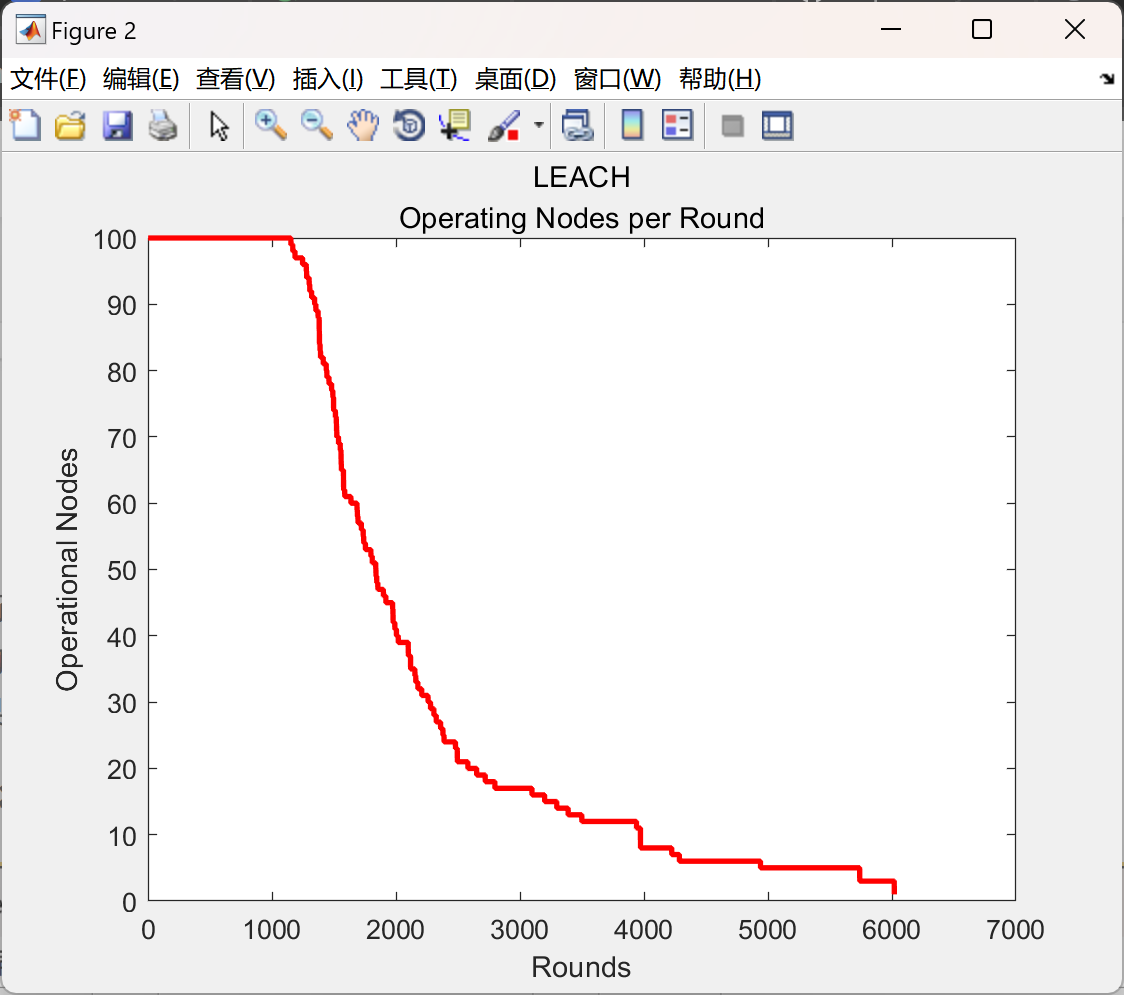
网络寿命受每个节点的能量消耗和CH的选择影响。LEACH是根据随机选择CH,这导致了网络寿命的减少,因此我们需要改变集群选择方法以增加网络寿命。
二、理论基础
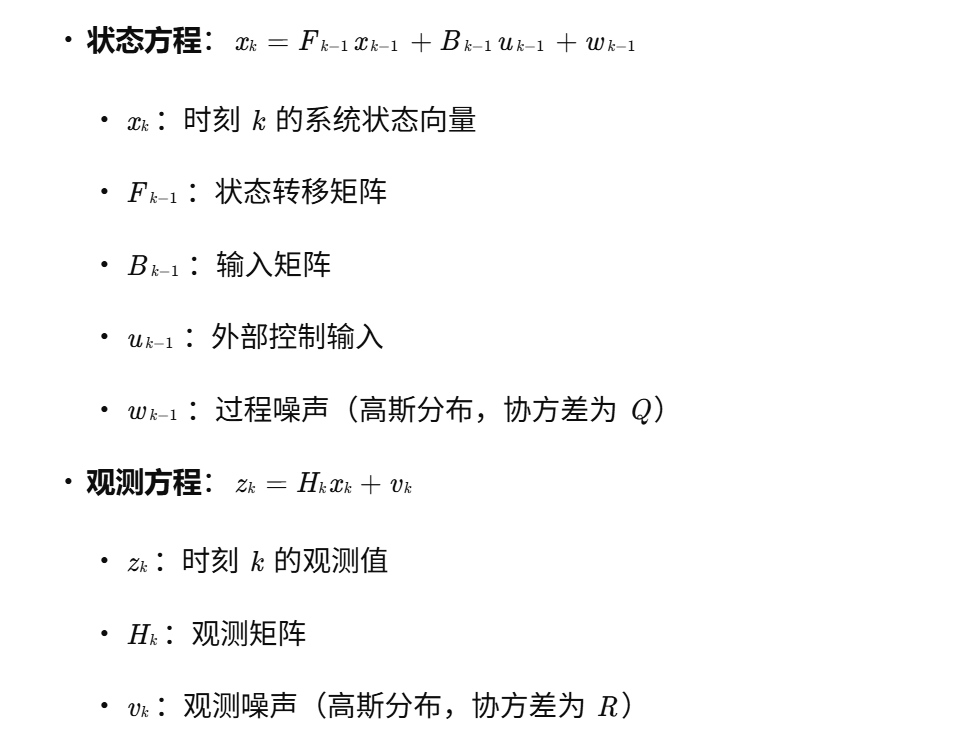
1. 系统状态空间模型
卡尔曼滤波器通过状态方程和观测方程描述系统动态与测量过程:
2. MMSE估计准则
MMSE估计的目标是找到状态 xk 的估计值 x^k∣k,使得均方误差 E[(xk−x^k∣k)2] 最小。卡尔曼滤波器通过线性组合预测值与观测值实现这一目标,其核心是计算最优增益 Kk。
三、卡尔曼最优增益的计算推导
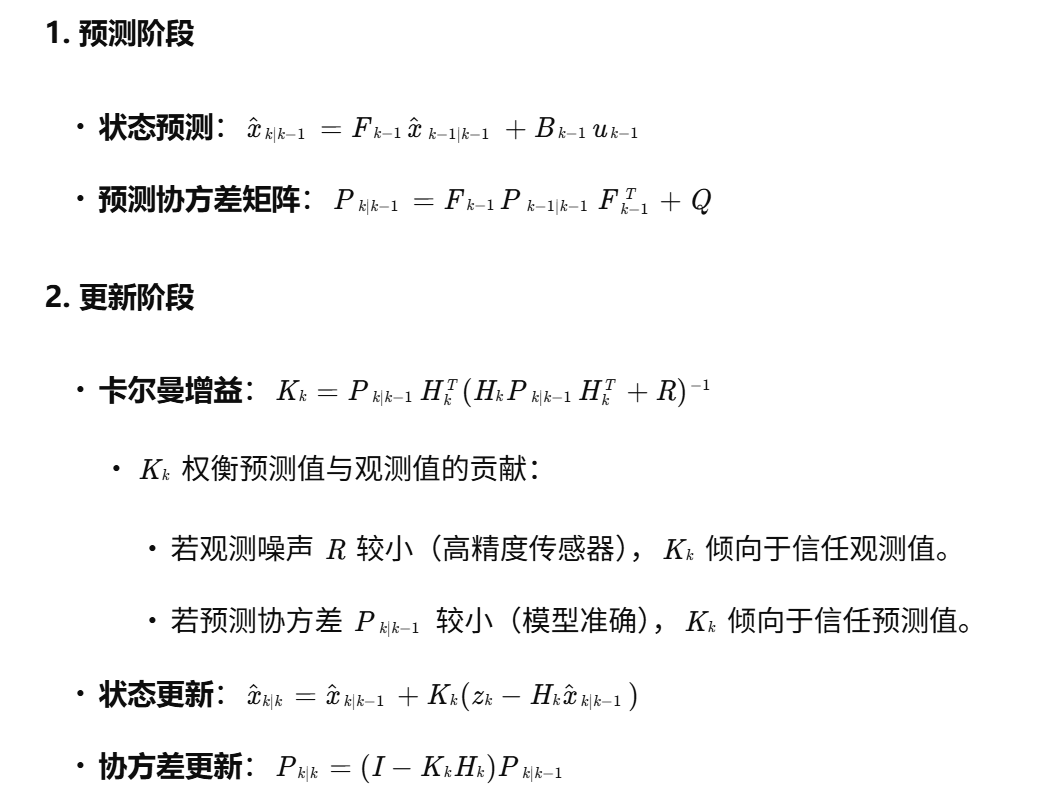
3. 推导过程
目标是最小化后验估计误差协方差 Pk∣k。通过展开 Pk∣k 并对其求导,令导数为零,最终得到卡尔曼增益的显式表达式:

四、计算流程
3. 终止条件
迭代至系统状态收敛或达到最大迭代次数。
五、实际应用与案例分析
1. 飞行器位置与速度估计
通过卡尔曼滤波器结合飞行器动态模型和传感器观测值,准确预测位置和速度。例如,在噪声干扰下,卡尔曼增益动态调整权重,使估计误差协方差最小化,提高导航精度。
2. 汽车导航系统
利用卡尔曼滤波器融合GPS观测值与车辆动力学模型,实时估计车辆位置和速度。在GPS信号丢失时,预测阶段仍能提供可靠估计。
3. 金融预测
在股票价格预测中,卡尔曼滤波器通过动态模型和历史数据观测,最小化预测误差,为投资决策提供支持。
六、性能评估与优化
1. 评估指标
- 估计精度:均方误差(MSE)或均方根误差(RMSE)。
- 收敛速度:达到稳定估计所需的迭代次数。
2. 优化方向
- 自适应卡尔曼滤波:根据系统动态变化调整噪声协方差矩阵 Q 和 R。
- 扩展卡尔曼滤波(EKF):处理非线性系统,通过泰勒展开线性化模型。
- 无迹卡尔曼滤波(UKF):通过无迹变换(UT)更精确地处理非线性问题。
七、结论
卡尔曼滤波器通过计算最优增益,在动态系统中实现了MMSE状态估计,广泛应用于导航、控制、信号处理等领域。其核心优势在于递归运算、计算简单和自适应性。未来研究可进一步探索非线性系统、多传感器融合等方向,以拓展卡尔曼滤波器的应用场景
本文提出了一种节能的LEACH协议,旨在提高传感器网络的寿命。
- 修改后的LEACH协议导致能源消耗较少,寿命较LEACH协议增加。
- 实验结果显示,所提出的LEACH协议比现有的LEACH协议产生更好的结果。
📚2 运行结果
部分代码:
% Grouping the Nodes into Clusters & caclulating the distance between node and cluster head %
for i=1:n
if (SN(i).role==0) && (SN(i).E>0) && (CLheads>0) % if node is normal
for m=1:CLheads
d(m)=sqrt((CL(m).x-SN(i).x)^2 + (CL(m).y-SN(i).y)^2);
% we calculate the distance 'd' between the sensor node that is
% transmitting and the cluster head that is receiving with the following equation+
% d=sqrt((x2-x1)^2 + (y2-y1)^2) where x2 and y2 the coordinates of
% the cluster head and x1 and y1 the coordinates of the transmitting node
end
d=d(1:CLheads); % fixing the size of "d" array
[M,I]=min(d(:)); % finds the minimum distance of node to CH
[Row, Col] = ind2sub(size(d),I); % displays the Cluster Number in which this node belongs too
SN(i).cluster=Col; % assigns node to the cluster
SN(i).dtch= d(Col); % assigns the distance of node to CH
SN(i).chid=CL(Col).id;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]刘亮.无线传感器网络路由协议中基于定位的节能算法研究[D].广西大学[2024-04-02].
[2]孙天一,陈涤.无线传感器网络LEACH协议的探讨及改进[J].传感器世界, 2005, 11(1):2.DOI:10.3969/j.issn.1006-883X.2005.01.008.
[3]刘玉华,赵永锋,许凯华,等.无线传感器网络LEACH协议的改进[J].计算机工程与应用, 2010, 46(17):4.DOI:10.3778/j.issn.1002-8331.2010.17.033.
[4]孙天一.无线传感器网络LEACH协议的探讨及改进[D].山东大学[2024-04-02].DOI:10.7666/d.y971031.

















 375
375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









