







**单片机设计介绍,微机原理-基于8086步进电机控制系统设计
一 概要
微机原理-基于8086步进电机控制系统设计概要主要围绕使用8086微处理器来构建步进电机的控制系统。以下是对该设计的核心要点和框架的概述:
一、设计背景与目标
步进电机作为一种能够精确控制位置和速度的执行机构,在工业自动化、机器人技术等领域具有广泛应用。基于8086微处理器的步进电机控制系统设计,旨在通过8086微处理器的强大计算能力和外设接口功能,实现对步进电机的精确、稳定控制。该设计不仅有助于深入理解微机原理,还能为步进电机的实际应用提供高效、可靠的解决方案。
二、系统组成与工作原理
系统主要由8086微处理器、步进电机、驱动器、电源模块以及相关接口电路组成。8086微处理器作为控制核心,负责接收并处理控制指令,通过驱动器向步进电机发送相应的控制信号。驱动器负责将微处理器的控制信号转换为步进电机能够识别的驱动信号,从而驱动电机按照预定的步数和速度转动。
在工作原理上,8086微处理器通过编程实现对步进电机的精确控制。控制程序根据实际需求,计算并发送相应的控制指令给驱动器。驱动器接收到指令后,驱动步进电机按照指令要求进行转动。通过精确控制脉冲信号的数量和频率,可以实现对步进电机位置、速度和方向的精确控制。
三、关键技术与实现方法
脉冲信号生成:8086微处理器通过编程生成精确的脉冲信号,控制步进电机的转动。脉冲信号的频率和数量决定了电机的转速和位置。
驱动器设计:驱动器需要具备较高的转换效率和稳定性,以确保步进电机能够准确、快速地响应控制指令。
接口电路设计:接口电路负责连接8086微处理器和驱动器,实现数据的稳定传输和控制指令的准确执行。
四、系统优化与扩展
为了提高系统的性能和稳定性,可以采取以下优化措施:
优化控制算法:通过改进控制算法,提高步进电机的控制精度和响应速度。
增加保护功能:添加过流、过压等保护功能,确保系统在异常情况下能够安全运行。
扩展通信接口:通过扩展通信接口,实现与其他设备的互联互通,提高系统的灵活性和可扩展性。
五、总结与展望
通过基于8086的步进电机控制系统设计,不仅能够深入理解微机原理在步进电机控制中的应用,还能够掌握步进电机控制系统的设计方法和实现技巧。未来,随着步进电机控制技术的不断发展,基于8086的步进电机控制系统还将有更多的优化和扩展空间,为工业自动化和机器人技术等领域的发展提供有力支持。
请注意,具体的设计实现细节可能因实际需求和技术条件而有所不同。在实际设计过程中,需要根据具体要求进行详细规划和调整,以确保设计的正确性和有效性。
二、功能设计
功能:实现步进电机的控制,包括正反转,启停,多挡位调速控制。
本电路采用8086CPU来控制,8086是16位CPU,采用高性能的N沟道、耗尽型负载的硅栅工艺制造
8086拥有四个16位的通用寄存器,也能够当作八个8位寄存器来存取,以及四个16位索引寄存器。资料寄存器通常由指令隐含地使用,针对暂存值需要复杂的寄存器配置。它提供64K 8 位元的输出输入,以及固定的向量中断。大部分的指令只能够存取一个内存位址,所以其中一个操作数必须是一个寄存器。运算结果会储存在操作数中的一个。8086有四个 内存区段寄存器,可以从索引寄存器来设定。区段寄存器可以让 CPU 利用特殊的方式存取1 MB内存。8086 把段地址左移 4 位然后把它加上偏移地址。8086 的寻址方式改变让内存扩充较有效率。8086处理器的时钟频率介于4.77MHz和10 MHz之间。
以8086CPU构成的微型计算机系统,有最小模式和最大模式两种配置。最小模式是单机系统,系统中所需要的控制信号全部由8086CPU本身提供;最大模式可以构成多处理机系统,系统中所需要的控制信号由总线控制器8288提供。CPU工作模式的选择是由硬件决定的,当CPU的管脚接高电平时,构成最小模式;当 接低电平的时候,构成最大模式。因为步进电机控制系统是一个单处理机系统,因而接高电平,构成最小模式。
三、 软件设计
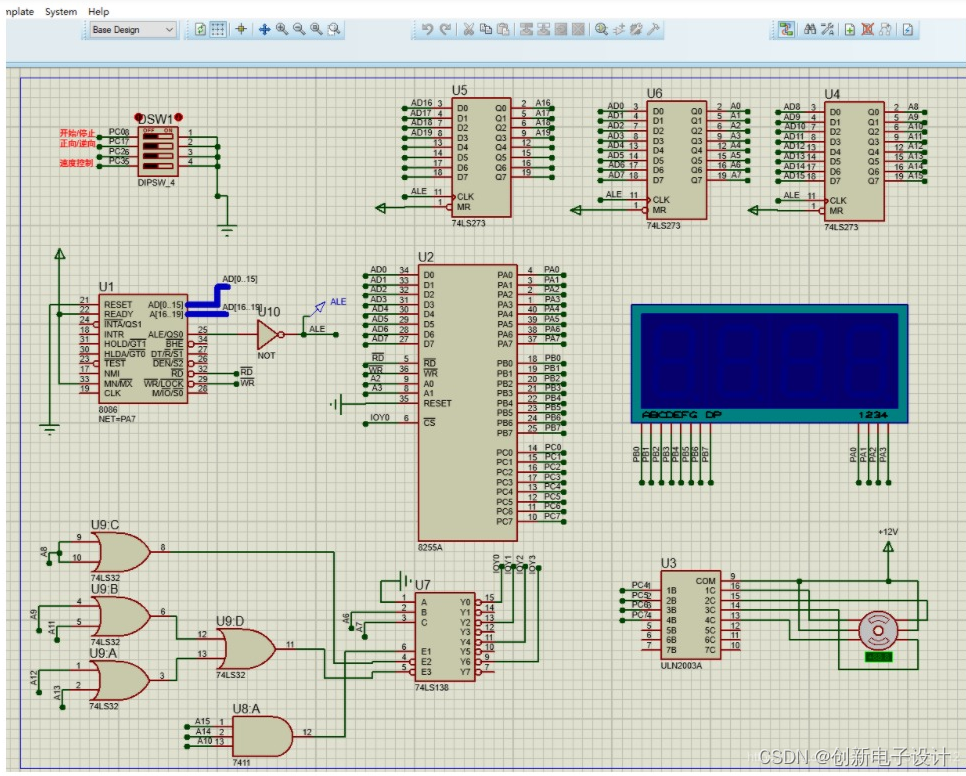
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图
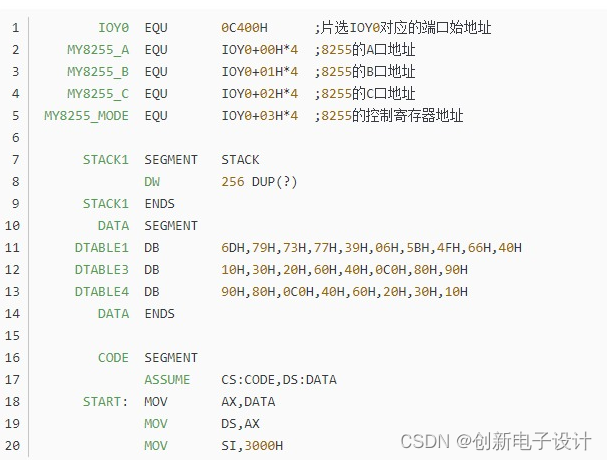
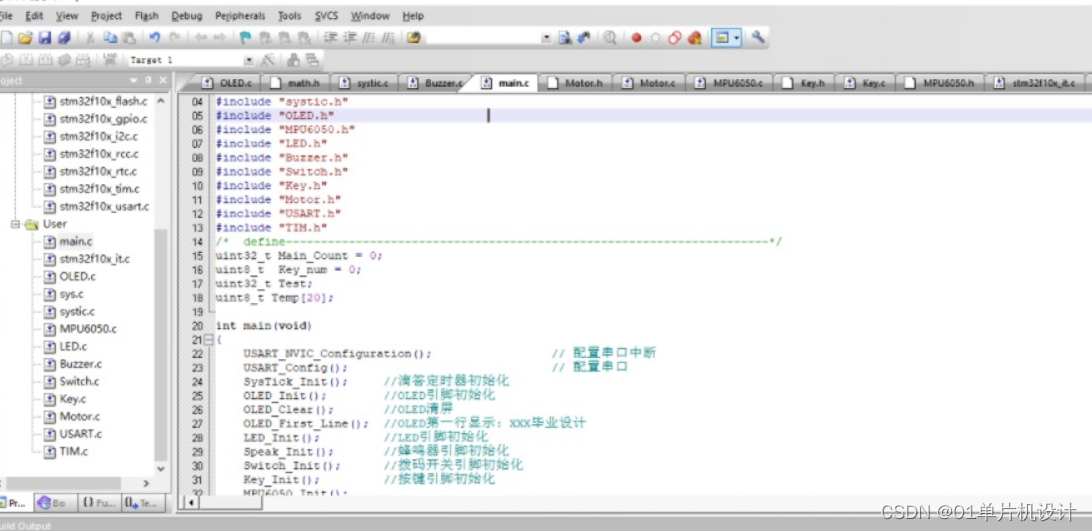
五、 程序
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25















 1636
1636











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









