







摘 要
研究分析本文设计制造采摘机械手设备的实际工作要求,对其所涉及的各项技术指标参数进行明确,积累设备设计制造的理论参数。基于现有相关机器人设备的相关内容和设计技术,结合本文设计制造机械手设备的实际使用工况,综合各项因素,设计确定采摘机械手设备的整体设计方案,并确定其主要部分的机械结构。本文深入研究采摘机械手装置应用背景和发展情况,通过学习和查阅相关学习资料和文献,了解了采摘机械手结构特点和传动原理等专业特点,充分运用所学机械设计相关知识,设计一个能够保证工作质量、缩短工作流程,结构紧凑合理,传动高效的采摘机械手装置。设计的采摘机械手装置主要由采摘机械手装置动力机构、采摘机械手装置动力传递机构、采摘机械手装置抓手机构和采摘机械手装置机架。经过多次试运行和试验,本文设计的采摘机械手能够实现高效率实现自动采摘果蔬功能,进而提高工作效果和工作质量。在设计完成整个设备之后,借助计算机三维软件SolidWorks绘制本文设计制造采摘机械手设备各个零部件的三维结构模型,同时装配得到整套设备的总体三维模型,借助该软件还能够对设备各个机构的运行状态进行检查,确保各个机构的运动作业过程不会发生相互干涉影响。
关键词:采摘功能;机械手;气压传动;机械设计;三维模型
1 采摘机械手装置总体方案设计
采摘机械手装置主要分为三个部分,动力源的产生、动力传递以及动力执行机构,从而实现整个装置的功能。根据其分类,本装置设计为动力产生机构、动力传递机构、动作执行机构以及支撑结构四大部分。
上述结构方案包括四部分,采摘机械手装置动力机构、采摘机械手装置动力传递机构、采摘机械手装置抓手机构、采摘机械手装置传送机构和采摘机械手装置机架。采摘机械手装置动力机构,选用电机提供动力源。采摘机械手装置大臂机构,通过电机驱动传动齿轮转动,分别实现采摘机械手的水平旋转,第一节和第二节大臂在垂直方向转动和机械手手腕的垂直转动。采摘机械手装置抓手机构,通过旋转气缸带动抓手进行转动,伸缩气缸带动拉杆前后移动带动手抓围绕铰链旋转实现抓手的抓取和松开。采摘机械手装置传送机构,通过电机带动驱动轴旋转带动传送带运转,张紧轴将传送带张紧。采摘机械手装置机架为了操作方便,平稳运行,设计机架装置,保证整体设计平稳高效。
2 采摘机械手装置动力 机构设计
随着时代进步,动力源产生装置主要有柴油机、汽油机、电动机、液压马达等一些新能源动力机等。综合考虑本装置设计方案、结构特点,为了后期便于维护等因素,采摘机械手装置选用电机作为动力源产生机构。
了解和分析采摘机械手装置实际工况,综合考虑本装置设计方案、结构特点、转速和功率的需求,本装置采用220V,200W的电机。该电机的优点就是不仅仅实现精准位置精度,而且能够很好控制速度,这样就能够平稳可靠的驱动控制对象。
2.1 采摘机械手装置大臂机构设计
采摘机械手装置大臂机构主要由电机、传动齿轮、轴承和支架等组成。采摘机械手装置大臂机构的作用是通过电机驱动传动齿轮转动,分别实现采摘机械手的水平旋转,第一节和第二节大臂在垂直方向转动和机械手手腕的垂直转动。设计的采摘机械手装置大臂机构如图2.1所示。

图2.1 采摘机械手装置大臂机构
2.2 采摘机械手装置传送机构
采摘机械手装置传送机构主要由电机、传送带、驱动轴、张紧轴和轴承等组成。采摘机械手装置传送机构作用是通过电机带动驱动轴旋转带动传送带运转,张紧轴将传送带张紧。通过调节螺栓伸出长度调节张紧轮的前后位置使皮带能够张紧,通过调节手轮实现传送带高度的调整。设计的采摘机械手装置传送机构如图2.3所示。
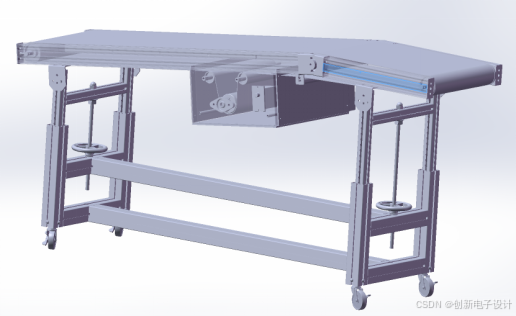
图2.3 采摘机械手装置传送机构
2.3 采摘机械手装置机架设计
本装置不仅仅是为了便于机构安装,而且还提供了各装置的安装接口,要考虑如何能够快速高效的完成水果采摘等关于采摘机械手装置功能的实现,因此机架对整个装置也很重要。
为了合理布置机构,使得结构紧凑,传动效率高,将动力产生机构和动力执行机构设计在一起。机架材质采用型钢和钢板焊接成骨架,这样经济实惠,还便于安装、固定和后期维护。机架和机构的连接通过螺栓实现的,通过垫块调整固定,这样既安全可靠,又经济实惠,还符合设计要求。
3 整体方案模型
通过上述设计方案和设计思路,以及各机构的工作原理,通过三维软件绘制采摘机械手装置装置三维模型,绘制过程中及时调整不合理的设计,优化设计方案,进而得出比较合理可行的三维模型,如图2.3所示。
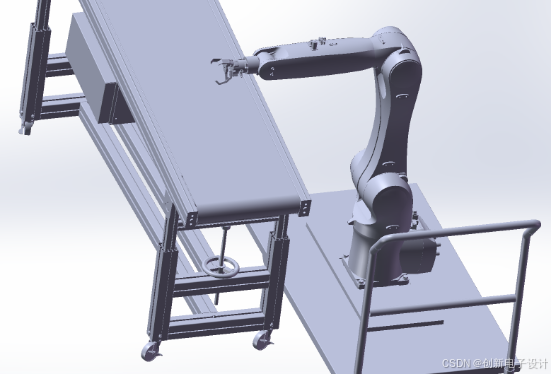
图2.4 采摘机械手装置三维模型
4 轴承选型和寿命计算
4.1轴承类型
在机械设备的设计过程中,广泛用到轴承部件,它是生产实际中较为多用的一个标准件,需要结合实际使用情况进行选型。
(1)依据承载方向以及公称接触角能够将轴承的类型划分成向心轴承和推力轴承两种;
(2)依据滚动体种类能够将轴承的类型进行划分成球轴承和滚子轴承两种;
(3)依据轴承是否能够调心能够将轴承的类型划分成调心轴承和非调心轴承两种;
(4)依据轴承滚动体的列数够将轴承的类型划分成单列、双列以及多列等多种类型的轴承;
(5)依据轴承自身部件是否可以分离够将轴承的类型划分成可分离轴承以及不可分离轴承等两种类型。
3.4.2轴承选择的基本原则
选用的轴承类型会直接影响采摘机械手设备的性能,故需要结合实际工况,选择最为合适的轴承类型,确保所选轴承能够满足实际使用需求。选择轴承主要要从以下方面进行考虑。
(1)轴承选型设计需要考虑轴承的载荷,确保选用轴承的承载满足实际使用需求。
(2)轴承选型设计需要考虑轴承的转速,确保选用轴承在保持正常工作状态下能够达到设备的速度需求,安全可靠的进行工作。
(3)轴承选型设计需要考虑轴承的的调心性能,确保轴承在设计安装的过程中能够较好的满足设计标准。
(4)选择的轴承要利于安装和拆卸,如此能够使得设备的装配过程得到有效简化。
轴承作为一个连接件,是机械设备极其重要的零部件,其直接影响了机械设备的使用寿命。轴承的寿命直接影响了整个装置的使用寿命,因此轴承寿命是本装置的一项重要指标。在本文采摘机械手设备的设计过程中,设计安装的轴承部件是与一轴进行连接,该轴的转速相对较小,故无需该轴承承受较高的转速,同时该主轴不存在因为受力而发生弯曲的情况,故无需选用调心轴承,由于本文设计仅存在轴向载荷,结合本文设计的实际情况,综合各种因素,选用深沟球轴承进行设计。
根据使用工况和载荷情况,选用型号为6208深沟球轴承,其额定动载荷Cr=29.1kN,静载荷Cor=17.9kN,由于转速较低,采用的润滑形式为脂,可以承受极限转速为10000r/min。
5 结 论
本文第一章介绍国内外该装置的发展情况,以及采摘机械手未来的发展演变,同时介绍一下本文的研究思路;第二章和第三者设计采摘机械手的传动原理,并制定整个装置的设计方案,对关键零部件进行选型计算,并对部分的机构进行计算和校核,进而得出的以下结论。
(1)我们在采摘机械手研究设计方面进步显著,但是与国外一些先进技术和设备还有差距,因此我们依然要虚心学习,潜心专研,尽可能以最快速度缩短差距,争取实现全面反超,这就给我们这一代大学生一定的任务和使命,压力大,动力也足。
(2)在制定采摘机械手装置的设计方案同时,对关键零部件进行选型计算,并对部分的机构进行计算和校核,这样最为合理,也相对经济实惠。结合查阅相关资料,充分运用所学机械设计相关知识,深入了解采摘机械手设计思路和工作原理,进一步完善整个装置的设计方案,进而保证采摘机械手能够实现高效、高质的设计理念。
(3)采摘机械手通过机械代替人工,能够大大降低劳动强度,已经成为趋势,随着市场需求越来越大,采摘机械手也迎来了发展机遇,我们应该接续奋斗,争取研究设计更好的装置,适应未来发展需要。
(4)绘制完成采摘机械手的总装配图,绘制主要机构和零部件的零件图。结合本文设计的整个过程,编写完成设备的设计说明书。
本文设计制造的采摘机械手可以较好的满足实际使用需求,可以在一定程度上有效解决自动采摘功能。本文设计的气采摘机械手具有相对较小的体积,且其的结构形式也相对较为简单,具有相对较好的的经济性,在生产实际中具有较好的适用性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









