










升降台左右移动工作平面的设计方法
在完成不同盖章工作时,章印在文件上的位置不尽相同。要想调整章印的位置,可以通过调整文件的相对位置来实现。但应该认识到,章印的位置需求是多种多样的。要想简便地满足这种需求,就需要设计出能够完成多方位盖章的设备,通过调整设备的工作面,从而满足全方位盖章的需求。笔者通过查阅文献,以及实地考察发现,在市场现有的盖章设备中,存在多种这样的结构。包括像滑板在滑槽中移动,以及方块在光轴上移动等。为了设备的美观性,使用2020型铝合金,在选用工作平面材料时,选用铝合金作为材料,实现工作平面的左右移动。
印尼左右移动工作平面的设计
在企业选择盖章机时,有两种选择,主要是钢印印章机,以及印泥盖章机,两者之间的区别主要在于是否需要印泥。印泥盖章机需要使用印泥作为盖章材料,如果印泥数量不够,章印的清晰度就会打折扣。本次设计出的自动盖章设备,就是为了解决蘸印泥的问题,实现自动蘸泥,从而提高盖章效率。设备中的自动升降平台,能够实现印章的自由升降,从而为盖章提供足够的下压压力。印章在自动升降的过程中,主要要进过两个阶段,首先要蘸泥,再进行盖章。为了印章能够蘸取到足够的印泥,就必须让印泥部分进行左右移动,从而能够自动蘸泥。然后当升降台下降时,自动完成盖章。为了实现印泥的左右移动,选择将印泥放置在托盘中,再将托盘与同步装置相连,实现印泥的自动。在现实生活中,存在许多这样的联动结构,像同步带轮等都属于这类结构。
机架的设计
整个盖章设备的外形主要有机架的结构决定。在本次设计方案中,选用的盖章纸规格主要有两种,根据这两类纸张的规格决定将底板大小设置为30cm35cm,数量为1块;将侧板大小设置为20cm25cm,数量为2块。为了方便操作,以及提高设备的强度,选择铝合金板作为底板的材料,针对机架连接部位,选用2020型角铝作为材料,在机架的安装过程中,底板上需要进行打孔。
同步轮设计
针对同步轮的设计,其主要材料包括有钢铁,还有黄铜,以及铸铁等。其内孔的形状主要有锥形孔,以及圆孔等。设计出来的盖章机,连接轴和印章的质量都比较大,总质量可达1kg,在印章下降途中,存在比较大的惯性。如果不采用同步轮传动,而是采用连接轴传动,那么将会设备会产生震动,将缩短设备的使用寿命。其主要特点如下:
第一,传动精度高,操作过程中摩擦因素影响小,传动过程稳定;
第二,传动过程平稳,能够有效缓冲,从而减少震动,以及噪音的出现;
第三,设备能量利用率高,非常节能;
第四,维修简单,设备成本低;
第五,数比范围广,可以达到10,线速度最高可以达到50m/s;
第六,设备产生的污染少,在恶劣的环境中也可以稳定工作。
经过以上分析,最终决定选用同步轮完成传动,实现印章的垂直升降功能。在设备工作时,只需要设定小篆书。所以,同步轮结构如图2-14:
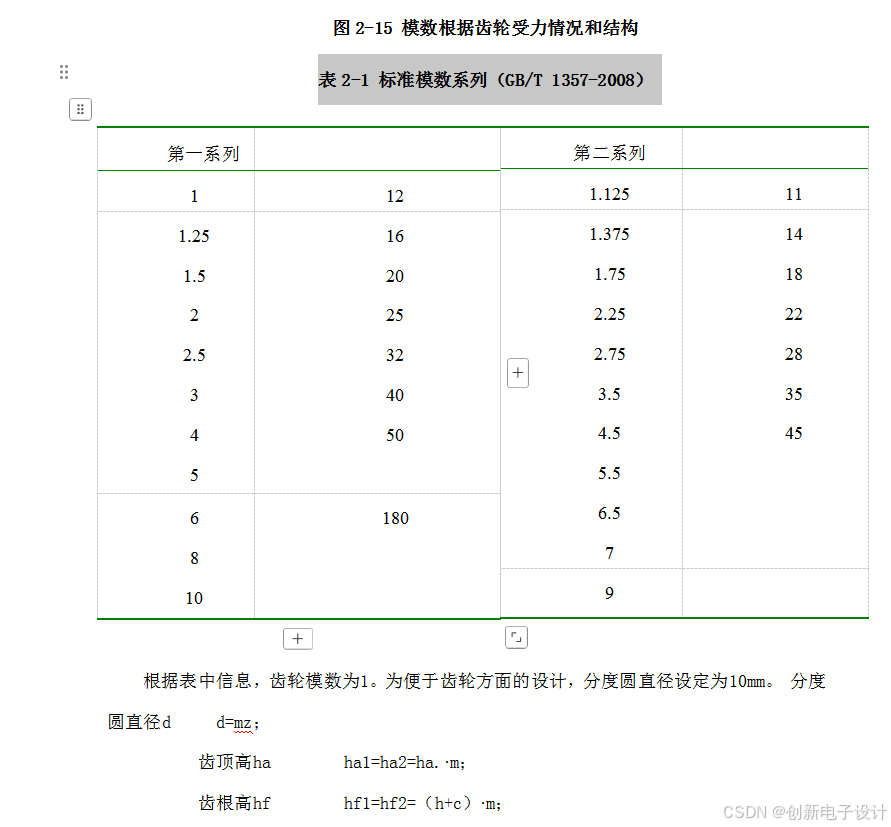
观察图2-2发现,光轴间距为60mm,所以,设置同步轮直径为12mm,齿顶圆直径设置为12mm。在同步轮工作期间,产生的应力小,不需要额外要求,具体可查阅表2-1,齿轮的各种详细信息,如图2-15:

直流电机与步进电机的比较
(1)直流电机的优缺点
优点主要包括有抗过载性能高,还有调速性能好,以及热转动性能高。
(2)步进电机的优缺点
优点包括有传动精度高,还有科学性高,以及转速范围广,缺点主要包括有转速低,还有操作复杂,还有容易产生共振,以及转矩小。
单片机烧录软件
就arduino-1.0.6软件来说,利用它编写的程序语言,可以直接检测。在检测没有问题的前提下,可以直接将程序语言导入Arduino Mega2560 R3系统。在这款软件中,有许多编写好的数据文件,可以直接使用,提高了使用者的效率,同时,也减少了程序错误的机率。这款软件有arduino-1.0.6绿色版,使用者不需要下载安装,直接启动,就可以进行编程工作。就EDUarduino2.0软件来说,可以看图3-4,获取直观的认识。在EDUarduino2.0软件的操作界面,存在一个非常便利的选项,那就是拖拽选项,用户通过这个选项,不仅能够提高编程的便捷性,还能够减少编程过程中出现的失误。但在其具体的操作过程中,也存在一些问题,其中最严重的就是拖拽选项功能不够完全,用户需要输入相应的指令后,软件才会进行编程工作。在需要输入复杂指令的情况时,可以将该选项改为代码,从而再次进行编程
全文总结
这次设计出的自动盖章机具有下列优点,包括有盖章效率高,以及能够实现全方面的盖章需求。在这次设计过程中,结合了机械设计知识,以及计算机技术知识,是一次多学科合作的结果。因此,可以认为多种学科的结合将会创造出更多有意义的产品。本次研究的的主要结论和成果在于:
第一,研究了盖章机的结构,独立实现了设计盖章机;
第二,编写了相关的系统程序,并对其进行了调试;
第三,设计出了自动盖章机的零部件,并完成了装配任务。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









