



概念
用于存放内存地址的变量叫指针变量。(每个内存都是一个编号。本质是整形数字(0~ffffffff))。
特点
高效访问数据
间接访问变量
可以操作底层硬件(操作硬件的寄存器)
运算符
& 取地址运算符
获得对应变量的内存的首地址(在内存中存储这个变量的起始的内存编号)。
取地址操作只能操作变量,不能操作表达式,常量。
int a =100; // int&a; == 0x2000; // int * ,相当变量的类型升级-》升级为对应基类型的指针如果需要打印地址的话,printf("%p\n",&a);
所有的指针都是 8个字节(64bit),不论什么类型。在64bit系统中,内存地址的范围0~ffffffff ffffffff ,刚好可以使用一个8字节的整数表示。
* 解引用 ,获得指针变量指向空间的内容。 操作对象是指针,或地址
* &a;-》 int 相当给指针降级 ,有原来的指针类型转换为对应基类型变量。
在解引用操作过程中,和指针的类型有关。 从首地址开始,加上 sizeof(基类型)大小后,在取出内存中的数据。
*p
1 .找到对应的内存地址
2.根据类型 ,sizeof(基类型) , 从首地址开始,加上 sizeof(基类型)大小后,在取出内存中的数据。
3.使用数据。读写数据。
* 和& 运算符,是互为反操作。
指针定义
基类型 * 指针名;
int* p; // int* 表示的是类型说明符
int a=100;
p =&a; p指针中存储了a的地址,p指向了a
int c = *p; int c=100 *p = int 读出指针指向内容
*p = 200; *p int ,左值情况 *p == a 向指针指向的内存,写入新的数据。
int *p;char *p;float *p;double *pint *p,q; // p -》int* q->int
初始化
int*p; 没有初始化的指针,
野指针
1,p中存储的地址,使用随机值。
2,指向了一个已经释放的内存空间。
先定义指针,稍后在p中装入地址。
int *q = NULL;// NULL == (void*)0
注意事项,指针变量在进行读写操作前,需要给定确定的地址(NULL,不能读写)。
int num1 = 20;int num2 =10;int*p = &num1;int* q=&num2;//int ret = num1+num2; 对变量的直接访问int ret = 0 ;ret = *p + *q; //对变量的间接访问
指针算数运算
+ - ++ --
int a =100;
int *p = &a;
printf("%p\n",p);
printf("%p\n",&a);
printf("%p\n",p+1);
int b[5]={1,2,3,4,5};
int *p=NULL;
int* q = &b[2];
//p = &b[0]; p=&b[0] 和 p=b 是等价的
p = b;
指针的加操作
for(i=0;i<5;i++){printf("%d %d\n",i,*(p+i)); //p+1 , p的地址值+ sizeof(基类型)}for 循环运行完后,p指针还在原来位置,也及时 p指向 b[0];
for(i=0;i<5;i++){printf("%d %d\n",i,*(p++));}for 循环运行完后,p指针指向数组最后一个元素的下一个,也及时 p指向 b[5](这个一个越界的位置);
指针相减
int b[5]={1,2,3,4,5};
int *p=NULL;
int* q = &b[2];
//p = &b[0]; p=&b[0] 和 p=b 是等价的
p = b;
printf(" q -p %ld\n",q-p); // p和q都是指向同一个数组。差值表示两个指针之间相差元素的个数
。不是直接地址值相减。
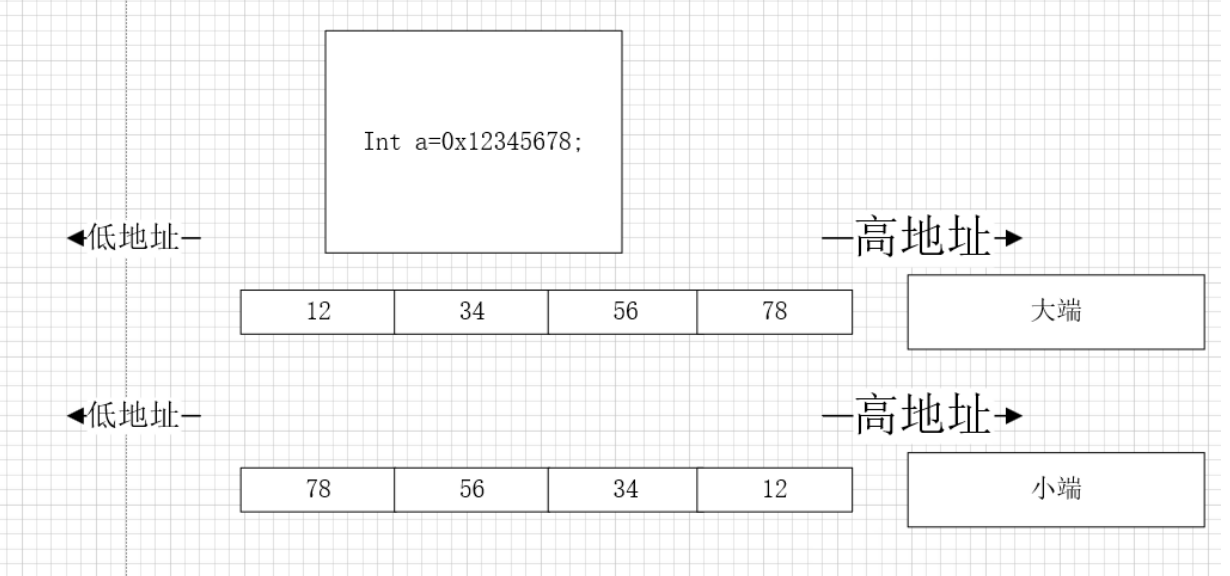
多字节数据的大小端存储
多字节数据的在内存的存储方式
1.小端字节序 数据的低数据位,在内存低地址,数据的高数据位,在内存的高地址
2.大端字节序数据的低数据位,在内存高地址,数据的高数据位,在内存的低地址

















 2721
2721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









