






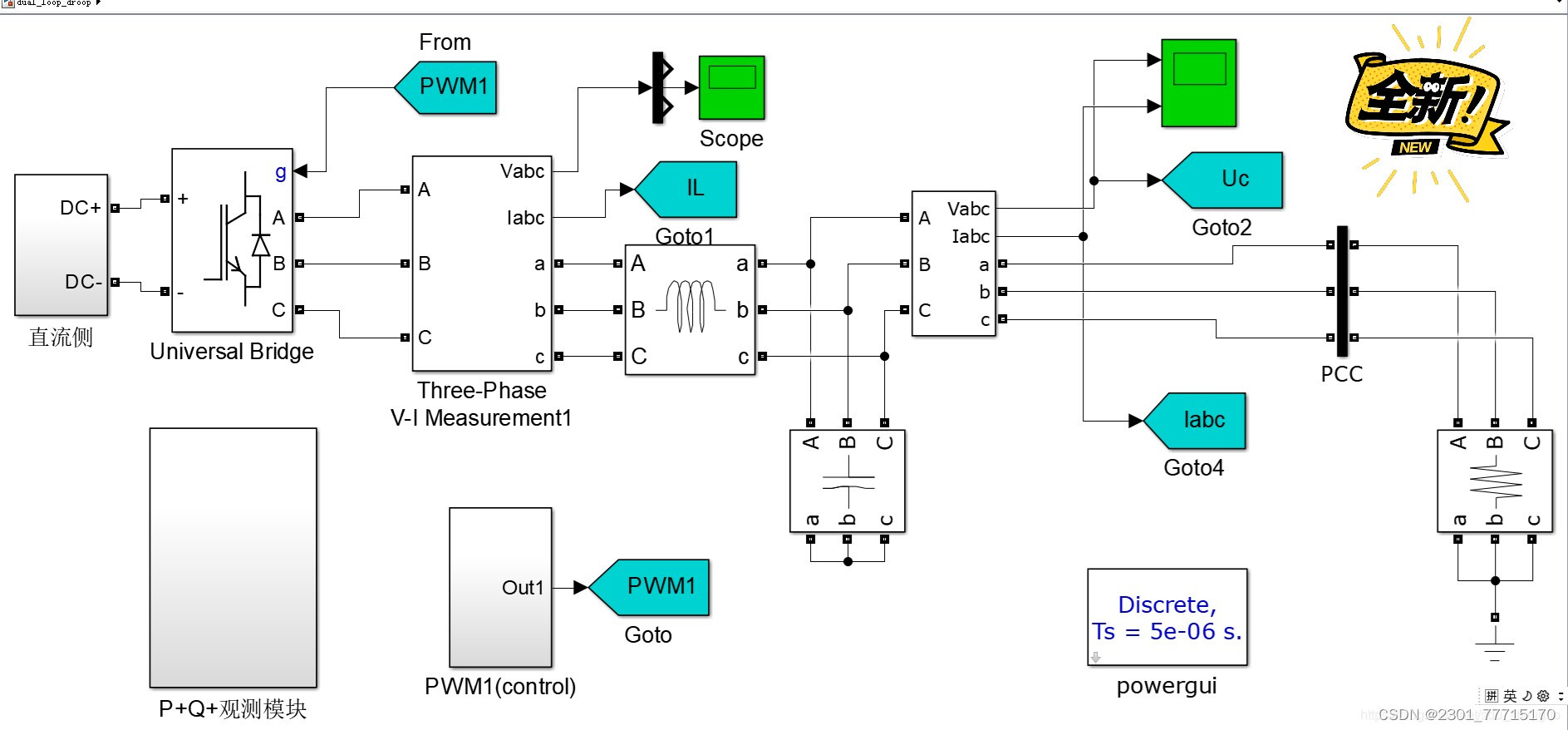
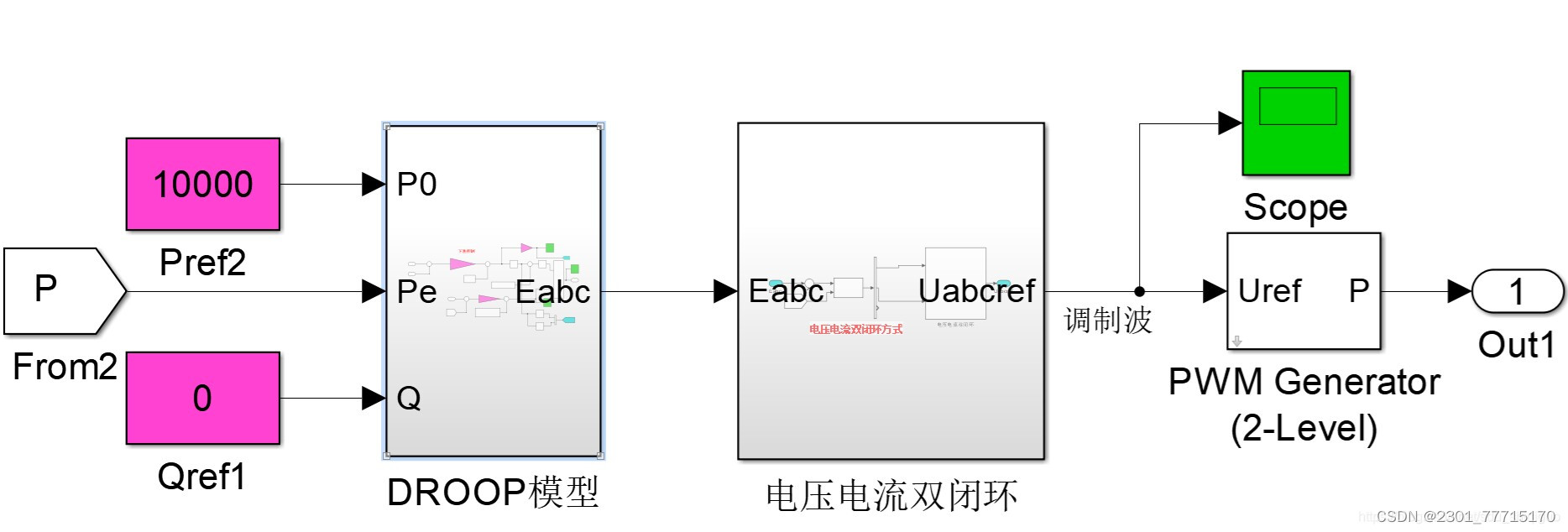
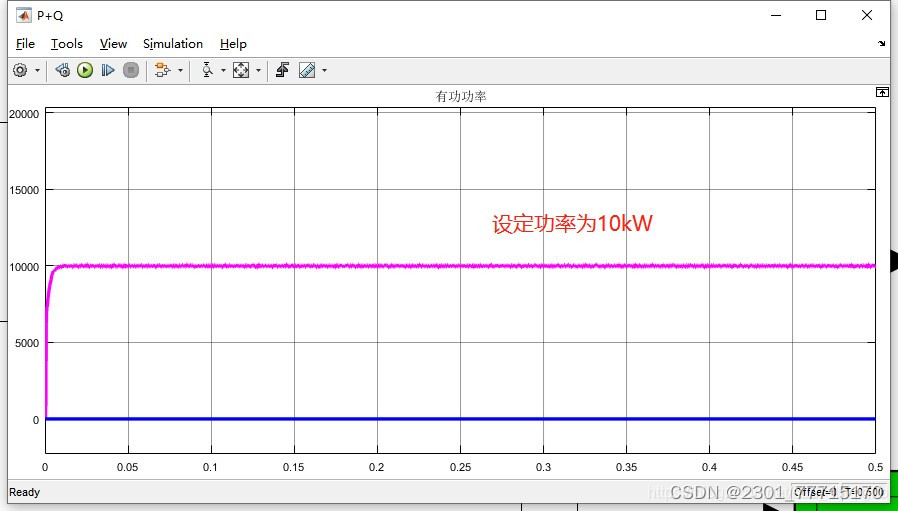
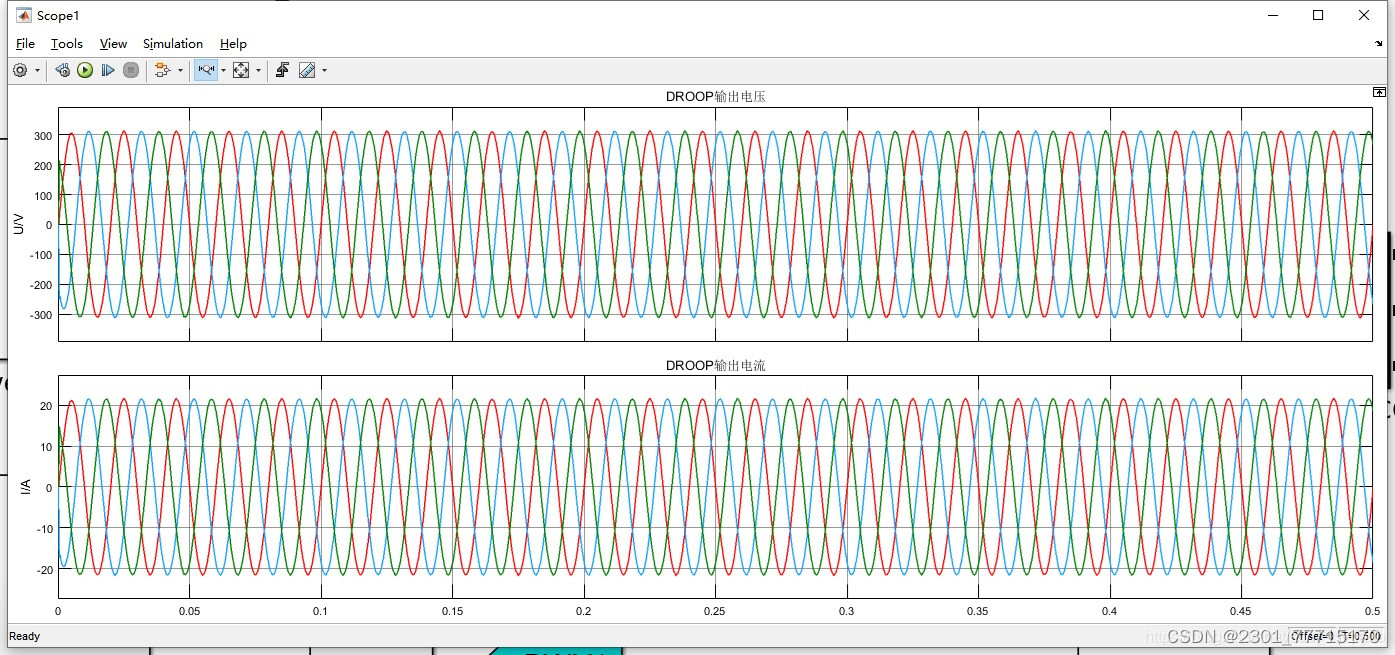
微电网逆变器下垂控制(DROOP控制)simulink仿真
采用电压电流双闭环控制,两电平拓扑,三电平可个性化定制
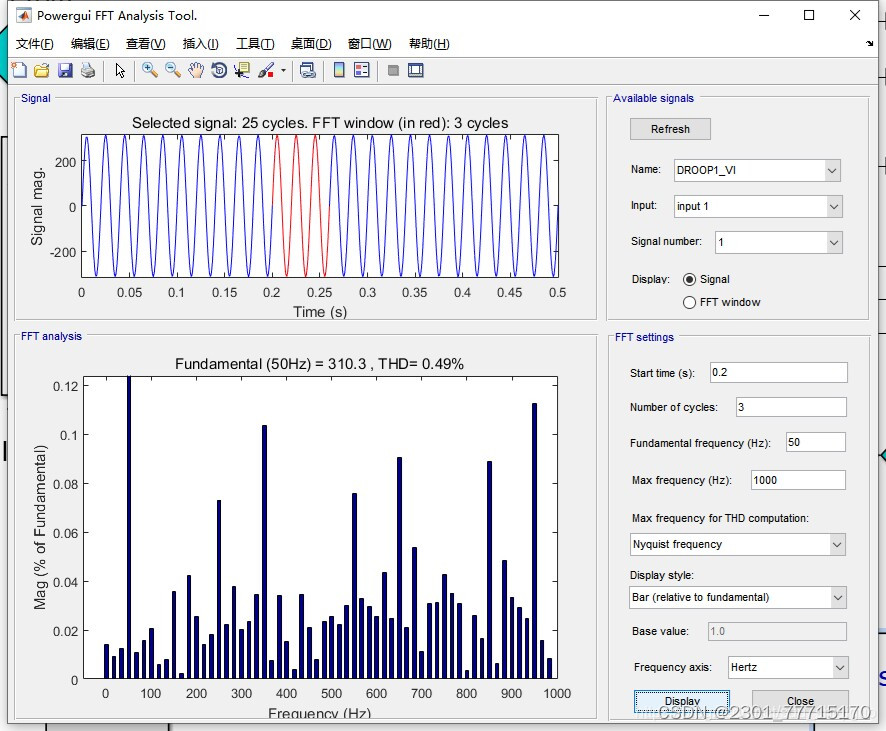
输出电流THD=0.49%,效果良好
ID:64160649496814681
微电网逆变器下垂控制(DROOP控制)simulink仿真
采用电压电流双闭环控制,两电平拓扑,三电平可个性化定制
输出电流THD=0.49%,效果良好
ID:64160649496814681
 520
520











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























