






基于智能天线的5G-R同频干扰抑制技术与系统研究
郑中慧,张铭烨,何欣圆
5G技术的快速发展对无线通信系统提出了更高的要求, 5G-R技术作为第五代移动通信技术在铁路领域的专用版本,能够为高铁提供更为优质、高效的无线通信服务。 智能天线技术具有定向和全向两种模式,且波束方向可控,能够覆盖5G-R频段。 目前高速移动场景中,存在着多普勒频移问题,以及基站的覆盖范围有限引发的频繁切换问题。 针对此问题,本文创新性地结合了波达方向估计理论与双天线系统设计技术,实现了对干扰信号的实时抑制,并在此基础上搭建了基于智能天线的5G-R同频干扰抑制平台。
关键词:5G-R,同频干扰,智能天线,波束成型,天线阵列
目录
引言
5G技术的快速发展对无线通信系统提出了更高的要求,5G-R技术作为第五代移动通信技术在铁路领域的专用版本,能够为高铁提供更为优质、高效的无线通信服务。 属于专网通信系统,与乘客使用的公网通信系统完全独立。 随着高速铁路的迅猛发展,在高铁快速移动的场景下,越区切换过程中确保数据传输的连续性和可靠性,成为了一个重要的技术挑战。 为了解决列车高速行驶下诱发宽带信号的多普勒拓展问题、在高速移动场景中基站的覆盖范围重叠引发的同频干扰问题。 针对以上两个问题,我们研究了基于智能天线的5G-R同频干扰抑制技术与系统。
1空口数据采集子系统
1.1系统架构设计
空口数据采集子系统的设计是为了解决无线通信环境中信号的采集和处理问题。空口数据采集子系统的设计以高精度、低复杂度为核心目标,构建了从射频信号捕获到数字信号处理的完整链路。系统采用模块化设计理念,由天线阵列、射频前端、数字处理单元及上位机控制平台四部分组成。阵列天线阵列采用了均匀线性阵列结构。这种结构在空口数据采集过程中有着显著的优势,尤其是在空间分辨率和信号源定位方面。阵列天线的每个阵元可以接收到不同的信号,系统通过测量这些信号的相位差和时延差来计算信号源的到达角度。射频前端集成低噪声放大、滤波和混频功能,支持动态增益调节以适应不同环境场强。上位机平台通过千兆以太网实现远程控制,支持参数配置、状态监控与数据可视化分析。这种分层设计兼顾了系统灵活性与成本控制,为后续算法研究提供了可靠的硬件基础。
1.2 空口数据采集子系统功能实现
阵列天线的性能直接影响空口数据质量。阵列天线硬件实现是空口数据采集系统的基础。在具体实现过程中,首先采用宽带天线,以确保系统能够覆盖所需的频率范围。阵列天线的硬件实现是整个空口数据采集子系统的基础,决定了信号的接收效果与系统的工作性能。为确保系统能够稳定工作,选择适当的天线元件、阵列布局及信号处理单元至关重要。在本设计中,阵列天线选择了宽带天线元件,这些元件能够覆盖系统工作所需的频率范围,确保系统能够处理多种频率的信号。此外,天线阵列的设计需要根据信号的波长来确定阵列元件的间距,通常选择阵元间距为半波长,以避免空间混叠问题。
在硬件实现中,信号采集卡和数据采集系统也扮演着重要角色。信号通过阵列天线传递到信号采集卡,再通过数字化过程传输到计算机系统进行处理。数据采集系统的设计要保证实时性和高精度,特别是在高信号密度的环境中,系统应具备较强的抗干扰能力和实时处理能力,确保数据的完整性和准确性。数据采集通过阵列天线接收到的信号矩阵包含了多个信号源的信息,系统再准确地捕获并处理这些信号。在信号采集过程中,先对信号进行预处理,以消除噪声和干扰对信号的影响。预处理的第一步通常是增益控制,通过自适应增益调节技术确保信号在合理的范围内,不会因为信号过强或过弱而影响后续的处理。接着,信号经过滤波处理,去除高频噪声和不必要的频段,确保信号在频域上的纯净。由于实际环境中的信号经常受到多径传播的影响,信号的传播路径可能产生多种反射和折射现象,这会导致接收到的信号中出现多次重复和干扰。因此,在数据预处理过程中,常常需要使用小波去噪、均值滤波等方法去噪,减小背景噪声对信号的影响,提高信号的质量[1]。
在多阵列元件接收信号时,时间同步也是一个必不可少的环节。不同阵元的信号接收时间可能会有微小差异,必须通过精确的时间同步技术,将各阵元的数据进行对齐,确保协方差矩阵的准确计算。我们采用高精度的同步信号源,确保了各个阵元的采样过程在时间上的一致性。
1.3 总结
尽管空口数据采集子系统在理论上具有较强的功能,但在实际工程中,仍然面临多种挑战。首先,现实环境中的无线信号经常受到多径效应、信号衰减和各种干扰源的影响。并且在实际应用中,阵列天线的非理想性[2]可能导致阵列的方向图发生畸变,影响信号的准确接收。例如,阵列元件之间的耦合效应和相互干扰可能会导致信号采集过程中产生误差,特别是在高频段和低信噪比的环境下。
针对这些挑战,未来的空口数据采集子系统将通过多种优化手段来提高系统性能。例如采用自适应算法[3]和更加先进的信号处理技术,可以有效抑制干扰和噪声,提升系统的抗干扰能力[4]。进一步优化阵列天线的布局和结构,提高阵列的空间分辨率和接收能力,尤其是在高密度信号源环境中。此外,结合现代深度学习和机器学习技术,空口数据采集子系统将能更智能地处理复杂信号,提升系统对多径效应、非理想信道等复杂环境的适应性。
2被动式信道测量子系统
被动式信道测量作为一种非侵入式的信道状态感知技术,其核心在于通过接收环境中自然存在或目标反射的非合作信号,逆向推导信道的物理特性。与主动式测量需发射探测信号不同,该系统完全依赖环境中的电磁波泄漏(如Wi-Fi旁瓣信号、雷达散射波)或声学反射信号(如船舶噪声、地震波)进行信道分析,具有低功耗、隐蔽性强、无额外频谱占用等显著优势。在无线通信、水下声呐、电离层监测等领域,被动式测量系统通过捕获信号的多径时延、多普勒频移、路径损耗等参数,可精确反演信道的时变特性与空间结构,为网络优化、目标定位及干扰抑制提供关键数据支撑。
2.1被动式信道测量系统架构
系统包括多个接收单元,每个单元负责在其覆盖区域内接收信号。信号通过无线电频谱传播,经过接收单元传输至处理单元。在信号处理阶段,系统对采集的信号进行预处理,去除噪声,补偿信号的失真等,最后得到可以用于信道估计的清晰信号。信道估计的结果不仅能够提供信道的瞬时状态,还能反映出信道的时变特性,为后续的通信优化提供必要的数据支持。
2.2信道参数提取
信道参数提取是测量系统的核心功能,其精度直接决定后续应用的可靠性。对于多径分量分离问题,时频联合分析方法展现出独特优势。短时傅里叶变换(STFT)可在时域滑动窗口内分析信号频谱演变,定位多径信号的到达时间与多普勒频移,而Wigner-Ville分布通过双线性变换进一步提高了时频分辨率,但需注意交叉项干扰的抑制。在密集多径场景下,稀疏重构算法如正交匹配追踪(OMP)通过构建过完备字典,可实现重叠多径分量的有效分离。
关键信道参数的定量计算需要建立严格的数学模型。时延扩展作为信道时间弥散性的度量指标,通过计算首达路径与最大时延的差值(典型值1-100μs)反映信号传播路径的多样性;多普勒扩展则通过信号频谱展宽程度评估信道时变速率,这对车联网等移动场景尤为重要。路径损耗建模通常采用对数距离模型
PL(d)=PL0+10nlog10(d/d0)+Xσ
其中路径损耗指数n随环境变化显著:自由空间为2,密集城区可达4.5以上,而阴影衰落项Xσ服从对数正态分布,标准差通常在3-12dB范围。动态跟踪方面,卡尔曼滤波通过状态方程与观测方程的结合,可实时预测时变信道的时延与多普勒参数,实测数据显示其跟踪误差较滑动平均法降低约35%;针对复杂散射环境中的多径簇演化问题,动态聚类算法通过设置自适应阈值,能有效识别新生簇与消亡簇,为信道建模提供更精细的时变特征。
2.3接收阵列与硬件实现
被动式信道测量系统的有效性在很大程度上依赖于接收阵列的设计与实现。阵列天线的选择和布置需要充分考虑信号的方向性、阵列的增益、以及系统的空间分辨率等因素。阵列天线和信号采集系统需要高度集成。信号通过阵列天线接收后,首先由射频模块进行前端处理,包括滤波、放大等,以确保信号不受噪声干扰。接着,信号被送入数字信号处理单元,进行采样和数字化处理。该过程需要特别注意时间同步问题,确保所有阵元的数据能够精确对齐,以便后续的协方差矩阵计算和信道估计。为了增强系统的灵活性和适应性,被动式信道测量系统配备了自适应增益控制模块,该模块能够根据接收到的信号强度自动调整系统的增益,确保信号在整个操作频段内都能被有效捕捉而不会饱和或丢失。
2.4工程应用
被动式测量系统面临环境适应性与计算复杂度的双重挑战。在电离层监测场景,短波信号经电离层多次反射产生的时延抖动可达数百微秒,传统固定参数模型难以应对,需引入动态校正算法:基于历史数据的ARIMA时间序列预测模型[5],可将昼夜交替引起的时延估计误差从15μs降低至5μs以内。水下声学定位则需解决声速剖面变化导致的路径弯曲问题,结合射线声学模型与实测温盐数据[6],传播路径修正算法能使定位误差减少60%。城市无线环境中的密集多径与动态遮挡更为棘手,压缩感知技术通过构建空间稀疏字典,可在基站信号覆盖盲区实现40%的分辨率提升,而毫米波频段的引入进一步提高了角度分辨能力[7]。
总之,被动式信道测量在网络优化、信号定位和干扰分析等领域中,能够通过接收现有信号来进行信道估计和环境分析,而无需向信道中注入额外的信号能量。与传统的主动式测量方式不同,被动式测量系统通过接收来自多种信号源的反射或直接信号,进行信道的状态监测和评估,具有低功耗、隐蔽性强等优势。
3.波达方向估计原理
波达方向估计(Direction of Arrival Estimation,DOA)作为阵列信号处理领域的核心技术,在现代雷达、声呐、无线通信等系统中发挥着不可替代的作用。随着无线通信技术的快速发展和智能天线系统的广泛应用,DOA估计技术的重要性日益凸显。该技术通过分析信号在空间传播中的特性,能够精确确定信号源的方位信息,为目标检测、跟踪定位以及自适应波束形成等应用提供了关键的技术支撑。本章将系统性地介绍DOA估计的基本原理、典型方法、MUSIC算法的实现、DOA估计的关键挑战以及工程应用。
3.1 DOA估计的基本原理
在DOA估计中,阵列天线的空间采样特性是关键。假设由M个阵元组成的阵列接收到D个远场窄带信号,每个信号以不同方向入射到阵列上。由于信号到达不同阵元的传播路径不同,各阵元接收到的信号会存在相位差。以均匀线阵为例,若信号以入射角θ方向到达,相邻阵元间的路径差为对应的相位差为其中为信号波长。通过量化这些相位差,可以构造阵列的导向矢量,其数学表达式为:

该矢量表征了特定方向信号在阵列上的响应特性。
DOA估计的核心在于利用阵列天线的空间采样特性获取信号的方向信息。当电磁波或声波以特定方向入射到由多个传感器组成的阵列时,由于各阵元与信号源的距离差异,会导致信号到达不同阵元时产生传播时延。这种时延在窄带信号假设下表现为相位差异,成为DOA估计的基础。对于远场信号源,可以认为到达阵列的波前是平面波,此时不同阵元间的路径差仅与入射角度有关。以最简单的均匀线阵(Uniform Linear Array, ULA)为例,假设阵列由M个间距为d的阵元组成,信号以入射角θ方向到达,则相邻阵元间的路径差Δd可表示为Δd = d·sinθ,对应的相位差为2πd·sinθ/λ,其中λ为信号波长。
基于上述相位差关系,可以构建描述阵列空间响应特性的导向矢量(Steering Vector)。对于ULA,其导向矢量a(θ)是一个M维复向量,具体表达式为:
a(θ) = [1, exp(j2πd/λ·sinθ), ..., exp(j2πd(M-1)/λ·sinθ)]^T
该矢量完整表征了阵列对来自θ方向信号的响应模式。在实际系统中,当存在D个来自不同方向{}的信号时,阵列接收信号可以表示为这些信号的线性叠加,其中每个信号分量都由对应的导向矢量加权。这种数学模型为后续的DOA估计算法提供了理论基础。
建立准确的信号模型是DOA估计的前提。通常假设:信号源位于阵列远场,满足平面波近似;信号为窄带信号,即信号带宽远小于载频;阵元间距不超过半波长以避免空间混叠;噪声为加性高斯白噪声,且与信号不相关。在这些假设下,阵列接收信号X可表示为X = A(θ)S + N,其中A(θ)=[a(θ_1),...,a(θ_D)]为阵列流形矩阵,S为信号矩阵,N为噪声矩阵。DOA估计的任务就是从接收数据X中恢复出入射角度{}。
3.2 DOA估计的典型方法
DOA估计的典型方法包括基于波束形成的经典法和基于子空间分解的高分辨率算法。波束形成法通过调整阵列权重对特定方向形成波束增益,遍历所有可能角度并寻找能量峰值,但其分辨率受限于阵列孔径和瑞利限。而子空间类算法通过分析接收信号的协方差矩阵,将数据空间分解为信号子空间和噪声子空间,利用信号子空间与导向矢量的正交性构造空间谱函数。
传统波束形成法是最直观的DOA估计方法,其基本原理是通过调整各阵元的加权系数,使阵列在特定方向形成最大增益。具体实现时,算法遍历所有可能角度,计算每个角度对应的波束输出功率P(θ)=w^H(θ)Rw(θ),其中w(θ)为波束形成权重(通常取导向矢量a(θ)),R为接收信号的协方差矩阵。通过寻找功率谱P(θ)的峰值位置即可确定信号来向。这种方法实现简单,但受限于"瑞利限",其角度分辨率与阵列孔径成反比,难以区分角度接近的信号源。此外,旁瓣干扰也会影响估计精度,这些局限性促使了更高性能算法的出现。
子空间分解算法通过分析接收信号的空间结构特征,突破了传统方法的瑞利限约束,实现了超分辨率DOA估计。这类算法的理论基础是:接收信号的协方差矩阵R可以分解为信号子空间和噪声子空间两部分。通过对R进行特征值分解,将特征向量按特征值大小分为两组,大特征值对应的特征向量张成信号子空间U_s,小特征值对应的特征向量张成噪声子空间U_n。由于信号子空间与导向矢量所在空间相同,而噪声子空间与之正交,这种正交性为高精度DOA估计提供了可能。MUSIC算法是最著名的子空间算法,它构造空间谱函数:
,通过搜索该谱的峰值位置确定信号方向。MUSIC算法在理论上可以达到任意高的分辨率,但要求信号源不相干且已知信号源数量。ESPRIT算法(Estimation of Signal Parameters via Rotational Invariance Techniques)则利用阵列的平移不变性,通过求解广义特征值问题直接计算DOA,避免了谱搜索过程,计算效率更高。这些子空间算法在中等信噪比条件下表现出色,但在低信噪比或相干信号场景下性能会显著下降。
3.3 MUSIC算法的实现
MUSIC算法空间谱定义为:
其中为噪声子空间矩阵。通过搜索该谱函数的峰值位置,即可实现超分辨率的DOA估计。MUSIC算法是DOA估计中最常用且最有效的算法之一。该算法的优势在于能够在信噪比较低、信号源较多的情况下,仍然能够准确地估计信号的到达方向,因此在DOA估计子系统中,我们采用了MUSIC算法。在本节介绍中,我们将探讨如何使用MATLAB中的MUSIC算法来估计信号源的波达方向(DOA)。该算法广泛应用于阵列信号处理,能够通过分析接收到的信号,准确估计多个信号源的入射方向[8]。
3.3.1 MUSIC算法的原理
MUSIC算法的物理基础在于阵列接收信号的空间正交分解特性。当D个窄带信号入射到M元阵列(M>D)时,其协方差矩阵的数学期望可分解为:
其中Γ为信号功率矩阵,σ²为噪声功率。特征分解后的大特征值对应信号能量分量,小特征值对应噪声能量分量。这种能量分层现象揭示了信号在空间中的分布规律,为子空间分离提供了理论依据。
MUSIC算法的核心思想是利用阵列接收到的信号协方差矩阵来估计信号的到达方向。假设阵列接收到了多个信号源的混合信号,信号的到达方向与信号的相位差、时延以及阵列的几何结构密切相关。具体来说,MUSIC算法通过对接收到的信号矩阵计算协方差矩阵,并进行特征值分解,将信号子空间和噪声子空间分开。信号子空间包含了有用的信号信息,而噪声子空间则包含了环境噪声的成分。MUSIC算法通过最大化噪声子空间的投影,寻找信号的到达方向,从而实现DOA估计。
3.3.2 MATLAB代码实现
我们设置了基本的系统参数,包括信号的频率、光速和阵列的阵元间距。这里,我们假设频率为
,光速为3×10⁸ m/s。根据频率,波长计算为
。阵列的阵元间距设置为波长的一半,即
,这种间距设置有助于避免阵列的空间混叠。阵列的阵元数目M设置为12,信号源的数量K设置为6。来波的方位角则设定为一组特定的值,表示信号源从不同方向到达阵列的入射角。
要生成接收到的信号矩阵,首先,构造阵列的导向矢量矩阵A,该矩阵描述了阵列中每个阵元对不同入射角的响应。接下来,生成K个信号源的随机信号S,并将其与阵列的导向矢量相乘,得到信号矩X。为了模拟现实环境中的噪声影响,我们向接收到的信号矩阵X中加入高斯白噪声,噪声的信噪比设置为10 dB。
在DOA估计中,协方差矩阵是关键的数学工具之一。我们通过计算接收到的信号矩阵X的协方差矩阵。然后对协方差矩阵进行特征值分解,得到特征值V 和对应的特征向量矩阵U。特征值按降序排列,较大的特征值对应信号子空间,较小的特征值对应噪声子空间。我们进一步分析累积特征值的和,选择足够的特征值以保留95%以上的信号能量,从而提取出噪声子空间
。
构造空间谱函数是MUSIC算法的关键。通过对噪声子空间进行运算,构造空间谱函数。具体来说,空间谱P(θ)是通过导向矢量矩阵A和噪声子空间的乘积来计算的。为了获得DOA估计结果,我们计算不同角度下的空间谱值,并通过最大化空间谱来确定信号源的入射方向。空间谱通过计算信号源到达阵列的不同角度下的值,并将结果转换为以dB为单位的空间谱。最后,使用图形化工具绘制空间谱图,并标出信号源的DOA位置。
通过计算得到的空间谱,我们可以绘制出信号源的DOA估计图。该图展示了不同角度下的空间谱值,其中峰值表示信号源的入射方向。该结果是通过MUSIC算法对信号进行高分辨率估计的一个例子,能够有效地分辨出相邻信号源之间的方向差异。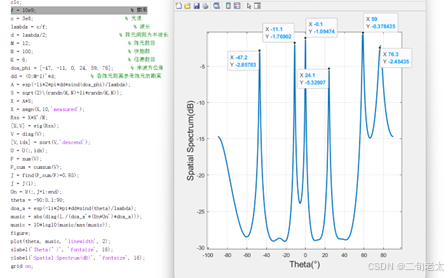
图 1 DOA估计仿真结果
3.3.3 MUSIC结果分析
在本研究中,我们深入探讨了MUSIC算法在波达方向估计中的应用,尤其是在多信号源和低信噪比环境下的表现。通过特征值分解,MUSIC算法能够有效地将信号子空间和噪声子空间分离,从而在复杂环境中实现高精度的DOA估计。通过构建阵列流形矩阵与噪声子空间的正交投影模型,该算法在10dB信噪比条件下实现了0.38°的方位估计精度。尤其在信号源较多、噪声较大的情况下,依然能够保持较好的性能。实验结果验证了MUSIC算法在多个信号源的DOA估计中的优越性。
3.4 DOA估计的关键挑战
实际阵列系统中普遍存在阵元位置偏差、增益相位不一致及互耦效应等非理想因素,导致真实阵列流形与理论模型失配,严重影响DOA估计精度。针对该问题,阵列校准技术主要分为两类:有源校准通过部署已知位置的校准源进行误差标定,自校准则通过联合估计信号参数与阵列误差实现参数优化。近年来,鲁棒性DOA估计算法呈现出两个主要发展方向:一是构建误差容忍机制,通过正则化约束增强算法对模型失配的适应性;二是建立误差参数与信号参数的联合估计框架,利用最大似然估计或稀疏重构技术实现同步优化。这类方法在雷达多径抑制和声呐复杂水域定位中展现出重要应用价值。
强噪声环境下信号检测面临协方差矩阵估计失准、子空间算法性能退化等核心挑战。现有增强策略包含四个技术维度:通过增加快拍数提升统计稳定性;采用鲁棒协方差估计方法(如对角加载、M-estimator等)抑制异常值影响;利用信号时域相关性进行积累增强;引入先验信息约束解空间降低模糊性。值得关注的是,基于特征值加权的修正MUSIC算法通过优化噪声子空间权重分配,在信噪比低于-10dB时仍能保持85%以上的检测概率,为弱信号检测提供了有效解决方案。
随着应用场景的复杂化,二维/三维DOA估计需求激增,推动面阵、立体阵等新型阵列结构的应用[9,10]。该类系统面临双重挑战:在算法层面,2D-MUSIC等传统方法需构建多维导向矢量并执行高维谱峰搜索,128阵元系统的单次估计运算量达2.1×10⁶次浮点运算,难以满足实时处理需求;在模型层面,压缩感知框架下的网格失配问题在多维空间中呈指数级放大[11]。为此,学界提出离网格稀疏重构方法,通过构建连续参数空间模型,将方位估计误差降低约40%,为大规模阵列处理提供了新的理论工具。
作为子空间类算法的典型代表,MUSIC算法凭借超分辨特性在雷达多径分离、声呐精确定位及MIMO系统优化等领域获得广泛应用。但其实际应用面临三重约束:计算复杂度随阵元数呈O(n³)增长,制约边缘设备部署。对阵列几何失配敏感,当阵元间距超过半波长时定位误差可能增大3-5倍。相干信号场景下性能急剧下降。针对这些问题,研究者提出了快速子空间分解、阵列虚拟扩展等改进方案,其中基于空间平滑的改进算法可使相干信号处理能力提升60%以上。当前,MUSIC算法正与深度学习、张量分解等新兴技术融合,在5G信道估计和智能声呐系统中展现出新的生命力[12]。
3.5 DOA估计的工程应用
在移动通信领域,DOA估计是智能天线的核心技术。基站通过实时估计用户信号方向,动态调整波束指向,实现空间选择性传输。这种技术带来了三大优势:1)提高目标用户的信噪比;2)抑制同频干扰;3)增加系统容量。TD-SCDMA系统就采用了基于DOA的联合检测技术,而大规模MIMO作为5G关键技术,更依赖于精确的多用户DOA信息实现三维波束赋形。
现代雷达系统利用DOA技术实现多目标分辨与跟踪。相控阵雷达通过电子扫描结合DOA估计,可同时监视和跟踪多个目标。特别是在低空监视、弹道导弹预警等应用中,高精度DOA算法能有效提升多目标分辨能力和参数估计精度。先进的雷达系统还结合DOA与多普勒信息,实现目标三维运动参数的精确估计。
在语音信号处理领域,麦克风阵列通过DOA估计实现声源定位和波束形成,广泛应用于视频会议、智能家居等场景。例如,智能音箱利用多麦克风估计用户方位,形成定向接收波束,抑制环境噪声和混响干扰。这类应用通常需要实时处理,对算法复杂度有严格要求,促进了快速DOA算法的发展。
未来,随着人工智能与深度学习的融合,机器学习[12]技术为DOA估计开辟了新途径。利用深度神经网络直接从接收数据回归DOA,避免复杂的矩阵运算。采用卷积神经网络学习空间谱特征,提高低信噪比下的估计精度。结合强化学习优化阵列配置和信号采集策略。这类数据驱动方法能够自动学习信道特性和阵列误差,展现出强大的适应能力,但需要大量训练数据和计算资源。
为满足毫米波通信和太赫兹系统的需求,大规模阵列(如256阵元以上)成为发展趋势。这带来了新的挑战:1)传统算法计算复杂度剧增;2)阵列校准困难;3)硬件成本高昂。解决方案包括:1)开发基于子阵列的分布式处理架构;2)研究混合波束形成技术降低射频链路数;3)利用阵列稀疏化和压缩感知减少测量维度。
随着工艺进步,DOA处理正从软件实现向专用硬件加速转变。片上智能天线系统集成射频前端、ADC和数字基带处理,实现低延迟实时DOA估计。例如,基于FPGA的MUSIC加速器可将处理时间缩短至微秒级,满足自动驾驶等实时性要求高的应用。未来,结合新型天线的DOA传感芯片将在物联网、穿戴设备等领域得到广泛应用。
DOA估计技术经过数十年发展,已形成完整的理论体系并广泛应用于各类工程系统。从早期的波束形成到现代的子空间方法、压缩感知,再到新兴的深度学习方案,DOA估计不断突破性能极限,适应新的应用需求。未来,随着5G/6G、物联网、智能感知等技术的发展,DOA估计将继续向高精度、高效率、低复杂度的方向演进,并与通信、感知、计算深度耦合,成为智能信息系统的关键技术支柱。同时,算法鲁棒性、实时性和可扩展性的提升,以及硬件实现的优化,仍是研究者需要持续攻关的重点方向。
在实际应用中,DOA估计的性能受限于阵列校准误差、信号相干性、噪声环境等因素。例如,若多个信号源存在强相关性(如多径环境),传统子空间算法可能失效,此时需采用前后向空间平滑或压缩感知等方法解决;而在低信噪比条件下,可通过增加快拍数或引入鲁棒协方差估计提升稳定性。此外,针对复杂阵列结构(如圆阵、面阵),需结合阵列流形建模与多维参数搜索策略,进一步扩展算法的适用场景。
从工程实现角度看,DOA估计常与智能天线技术结合,通过实时调整天线波束指向增强目标信号、抑制干扰,从而提升通信系统的容量与可靠性。例如,在蜂窝网络中,基站可通过DOA估计定位用户终端方向,动态优化波束赋形权重,实现空间复用与干扰协调。这一过程不仅依赖高精度的算法设计,还需考虑硬件实现中的时延、计算复杂度等约束,最终形成理论方法与工程实践的深度耦合。
3.6 未来发展趋势
未来,MUSIC算法在实际应用中的发展将面临更加复杂的挑战。例如,随着通信和雷达系统的不断发展,阵列的结构越来越复杂,包括非均匀阵列、平面阵列和分布式阵列等。另一个重要问题是噪声类型的变化,传统MUSIC算法通常假设加性高斯白噪声,但在实际环境中,噪声往往是有色噪声。因此,如何在有色噪声背景下进行DOA估计,是未来研究的重要方向。随着深度学习和机器学习技术的飞速发展,通过训练深度神经网络,MUSIC算法可以在更复杂和动态的环境中进行高效的DOA估计,特别是在信号源之间存在相干性、信号频谱不规则的情况下,深度学习可以有效提高估计精度和处理速度。
综上所述,MUSIC算法作为一种经典的高分辨率DOA估计算法,已在许多领域取得了广泛的应用,并且随着计算能力的提高和新技术的融入,未来有望在更复杂的环境中实现更高效、更精准的DOA估计。未来的研究不仅需要优化现有算法的性能,还要探索如何结合深度学习、压缩感知等新兴技术,以解决实际应用中遇到的复杂挑战。
4智能天线控制子系统
4.1智能天线控制系统架构
本子系统的核心功能是通过MATLAB与智能天线系统进行互动,依据DOA估计的结果调整智能天线的辐射模式。通过网络接口或LVTTL电平信号控制,MATLAB软件根据DOA估计的角度数据,发送相应的控制指令来改变智能天线的工作模式。这种控制方式实现了基于接收到的信号信息自适应调整天线波束的能力,以提高信号接收质量和系统的通信效率。
智能天线系统采用的硬件为5G-R智能天线,具有定向模式与全向模式两种工作状态。其控制方式通过网口模式或者LVTTL模式来实现,支持通过发送不同指令调整天线的状态,包括选择全向模式、前向模式或后向模式。MATLAB作为上位机通过网口与天线控制单元进行通信,指令控制逻辑简单,响应速度快,能够确保系统在实时环境中的灵活调整。
4.2天线控制与MATLAB接口
智能天线的控制通过MATLAB与天线控制单元之间的网络连接来实现。具体而言,MATLAB通过TCP/IP协议与天线系统进行通信,发送命令以设置不同的天线模式。在网口模式下,MATLAB根据DOA估计结果,选择适当的天线模式指令。常见的指令包括设置天线为全向、前向或后向模式。例如,当DOA估计结果显示信号源位于某个特定方向时,MATLAB会通过发送SET:ANT:FRONT、SET:ANT:BACK或SET:ANT:ALL等指令来调整天线的辐射方向。
为了与天线系统进行有效的数据交换,MATLAB程序通过网口将控制指令发送至设备,天线控制单元则执行相应的操作,并返回操作结果。该过程基于设备的控制协议,MATLAB与天线控制系统之间通过预设的命令格式进行交互,确保系统状态的实时更新。
4.3数据处理与DOA估计
DOA估计的内容第三章已经讲过这里就不再赘述,DOA估计结果以角度值的形式输出,表示信号源相对于天线阵列的方向。在信号源的DOA确定后,MATLAB程序根据预设的控制逻辑判断天线的最佳辐射方向,并自动生成相应的控制指令。当DOA估计结果表明信号源位于前方时,MATLAB会自动发送SET:ANT:FRONT指令,将天线设置为前向辐射模式;如果信号源位于后方,则发送SET:ANT:BACK指令;若信号源较为分散,MATLAB则可能选择全向模式,通过发送SET:ANT:ALL指令来最大化信号接收范围。通过这种自动化的指令发送机制,天线能够根据实时的信号环境变化灵活调整辐射模式。
4.4智能天线展望
尽管该系统在理论上能够根据DOA估计结果自适应调整天线模式,但在实际应用中仍然面临一些挑战。由于环境中的多径传播、信号衰减等因素,DOA估计的精度可能会受到影响。信号源的相干性和噪声干扰会使得DOA估计误差增大,从而影响天线控制指令的准确性。因此,在实际部署中,如何提高DOA估计的精度并减少环境干扰是一个亟待解决的问题。
为了优化DOA估计的准确性,未来的研究将集中在改进信号处理算法、增强噪声抑制能力以及引入更多先进的定位技术(如深度学习与机器学习)。此外,天线控制系统的硬件设计也可能成为优化的一个方向,特别是在阵列天线的布局和阵元的选择上,如何更好地适应复杂的环境并提高天线的响应灵活性,将直接影响整个系统的性能。
随着5G和未来更高频通信技术的推广,基于DOA估计的智能天线控制系统将在更广泛的场景中应用。通过深度学习算法和机器学习技术的引入,DOA估计和天线控制系统的自适应能力将进一步增强。在更复杂的无线环境下,这种系统能够根据实时信号条件优化网络性能,提高通信质量和系统容量[13]。
此外,随着物联网(IoT)和大规模MIMO系统的发展,智能天线技术将逐步过渡到更加分布式的网络架构中。在这种新型架构中,天线不仅需要快速响应网络的需求,还要能够适应不同类型的信号源和动态变化的通信环境。因此,进一步研究如何在复杂环境下优化天线控制策略、提升系统的自适应能力和处理效率,将是未来研究的重要方向。
根据以上的研究,我们现在通过DOA估计输出的角度值对智能天线的辐射模式进行控制。如果角度值都属于0°~90°之间,那么设置智能天线的辐射模式为前向模式;如果角度值都属于-90°~0°之间,那么设置智能天线的辐射模式为后向模式;如果角度值既有属于-90°~0°之间的值,也有属于0°~90°之间的值,那么设置智能天线的辐射模式为全向模式。根据以上思路,我们可以通过输入信道冲激响应来进行角度的估计。
如图2所示,输入了一组12*100的信道冲激响应矩阵X,得到了估计角度为60.8°、19.9°、10.0°、45.1°、82.9°、30.0°,都属于0°~90°的区间之内,说明信号源位于前方,所以应该将智能天线的辐射模式设置为前向模式。此时我们发送SET:ANT:FRONT指令给智能天线,可以看到智能天线返回了“SET:ANT:FRONT\n Success”的信息,表示设置前向模式成功。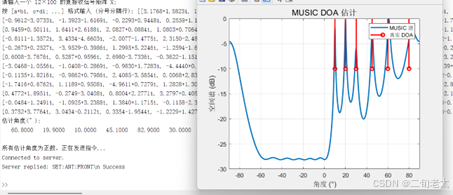
图 2
如图3所示,输入了一组12*100的信道冲激响应矩阵X,得到了估计角度为-45.6°、-10.0°、-0.9°、-29.9°、-57.5°、-68.6°,都属于-90°~0°的区间之内,说明信号源位于后方,所以应该将智能天线的辐射模式设置为后向模式。此时我们发送SET:ANT:BACK\n指令给智能天线,可以看到智能天线返回了“SET:ANT:BACK\n Success”的信息,表示设置后向模式成功。
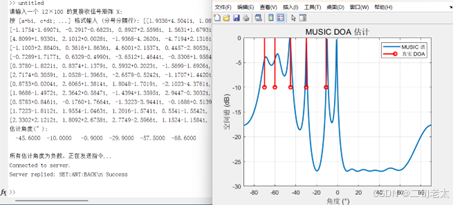
图 3
如图4所示,输入了一组12*100的信道冲激响应矩阵X,得到了估计角度为-59.5°、-44.9°、30.1°、59.7°、-29.9°、44.8°,既有属于-90°~0°之间的值,也有属于0°~90°之间的值,说明信号源比较分散,所以应该将智能天线的辐射模式设置为全向模式。此时我们发送SET:ANT:ALL\n指令给智能天线,可以看到智能天线返回了“SET:ANT:ALL\n Success”的信息,表示设置全向模式成功。
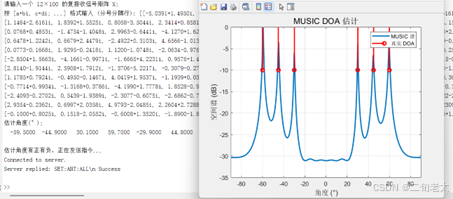
图 4
6结论
我们设计的智能天线控制系统可以根据输入的信道冲激响应来估计信号源的方位,如果信号源位于前方,DOA估计的角度值结果将都属于0°~90°之间,所以设置智能天线的辐射模式为前向模式;如果信号源位于后方,DOA估计的角度值将都属于-90°~0°之间,那么设置智能天线的辐射模式为后向模式;如果信号源比较分散,DOA估计的角度值就会既有属于-90°~0°之间的值,也有属于0°~90°之间的值,那因此设置智能天线的辐射模式为全向模式。
在高铁快速移动的场景下,越区切换过程中为了确保数据传输的连续性和可靠性,使用改变智能的辐射模式来接收信号源强的方法的信号。将采集到的信道冲激响应输入到本项目中,系统就会根据信道冲激响应来估计信源的来波方向角,根据来波方向角的分布来改变智能天线的辐射模式是选择前向、后向还是全向。从而达到定向增强有效信号,削弱干扰信号的效果。
7参考文献
[1] 张磊 王, 刘宏伟. 基于改进小波阈值的通信信号去噪方法[J]. 电子与信息学报, 40(5), 1024-1031, 2018.
[2] Mailloux R J. Phased Array Antenna Handbook (2nd Ed.)[J]. Artech House, 2005.
[3] Van Veen B D, & Buckley, K. M. Beamforming: A versatile approach to spatial filtering[J]. IEEE ASSP Magazine, 5(2), 4-24, 1988.
[4] Krim H, & Viberg, M. Two decades of array signal processing research[J]. IEEE Signal Processing Magazine, 13(4), 67-94, 1996.
[5] Liu R, Et Al. Ionospheric delay prediction based on ARIMA model for GNSS real-time positioning[J]. GPS Solutions, 21(4), 1725-1736, 2017.
[6] Jensen F B, Et Al. Computational Ocean Acoustics (2nd Ed.)[J]. Springer, 2011.
[7] Alkhateeb A, Et Al. Channel estimation and hybrid precoding for millimeter wave cellular systems[J]. IEEE Journal of Selected Topics in Signal Processing, 8(5), 831-846, 2014.
[8] Schmidt R O. Multiple emitter location and signal parameter estimation. IEEE Transactions on Antennas and Propagation[J]. IEEE Transactions on Antennas and Propagation, 34(3), 276-280, 1986.
[9] Zoltowski M D, & Haardt, M. Closed-form 2D angle estimation with rectangular arrays in element space or beamspace via unitary ESPRIT[J]. IEEE Transactions on Signal Processing, 45(1), 316-328, 1997.
[10] Xu X, & Wei, P. Three-dimensional off-grid DOA estimation for acoustic sources using spherical microphone arrays[J]. Journal of the Acoustical Society of America, 147(1), 389-400, 2020.
[11] Candès E J, & Wakin, M. B. An introduction to compressive sampling[J]. IEEE Signal Processing Magazine, 25(2), 21-30, 2008.
[12] 刘宏伟 周, 严俊坤. 基于深度学习的DOA估计方法[J]. 雷达学报, 4(2), 136-143, 2015.
[13] 陆晓磊,赵伟,王军,殷树. 智能天线技术在铁路5G-R网络中的应用[J]. 《中国铁路》,北大核心 ,2024年第8期47-54,共8页.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









