







文章目录
学校组织秋游,组长在等待:
- 张三:我到了
- 李四:我到了
- 王五:我到了
- 组长说:好,大家都到齐了,出发!
秋游回来第二天就要提交一篇心得报告,组长在焦急等待:张三、李四、王五谁先写好就交谁的。
在这个日常生活场景中:
- 出发:要等待这3个人都到齐,他们是"与"的关系
- 交报告:只需等待这3人中的任何一个,他们是"或"的关系
在FreeRTOS中,可以使用事件组(event group)来解决这些问题。
本章涉及如下内容:
- 事件组的概念与操作函数
- 事件组的优缺点
- 怎么设置、等待、清除事件组中的位
- 使用事件组来同步多个任务
一、事件组概念与操作
1、事件组的概念
事件组可以简单地认为就是一个整数:
- 每一位表示一个事件
- 每一位事件的含义由程序员决定,比如:Bit0表示用来串口是否就绪,Bit1表示按键是否被按下
- 这些位,值为1表示事件发生了,值为0表示事件没发生
- 一个或多个任务、ISR都可以去写这些位;一个或多个任务、ISR都可以去读这些位
- 可以等待某一位、某些位中的任意一个,也可以等待多位
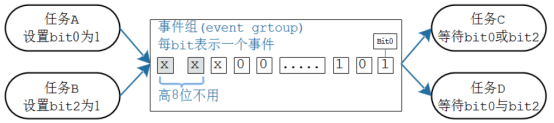
事件组用一个整数来表示,其中的高8位留给内核使用,只能用其他的位来表示事件。那么这个整数是多少位的?
- 如果configUSE_16_BIT_TICKS是1,那么这个整数就是16位的,低8位用来表示事件
- 如果configUSE_16_BIT_TICKS是0,那么这个整数就是32位的,低24位用来表示事件
- 如果configUSE_16_BIT_TICKS是用来表示Tick Count的,怎么会影响事件组?这只是基于效率来考虑
- 如果configUSE_16_BIT_TICKS是1,就表示该处理器使用16位更高效,所以事件组也使用16位
- 如果configUSE_16_BIT_TICKS是0,就表示该处理器使用32位更高效,所以事件组也使用32位
2、事件组的操作
事件组和队列、信号量等不太一样,主要集中在2个地方:
- 唤醒谁?
- 队列、信号量:事件发生时,只会唤醒一个任务
- 事件组:事件发生时,会唤醒所有符号条件的任务,简单地说它有"广播"的作用
- 是否清除事件?
- 队列、信号量:是消耗型的资源,队列的数据被读走就没了;信号量被获取后就减少了
- 事件组:被唤醒的任务有两个选择,可以让事件保留不动,也可以清除事件
以上图为列,事件组的常规操作如下:
- 先创建事件组
- 任务C、D等待事件:
- 等待什么事件?可以等待某一位、某些位中的任意一个,也可以等待多位。简单地说就是"或"、"与"的关系。
- 得到事件时,要不要清除?可选择清除、不清除。
- 任务A、B产生事件:设置事件组里的某一位、某些位
二、事件组函数
1、创建
使用事件组之前,要先创建,得到一个句柄;使用事件组时,要使用句柄来表明使用哪个事件组。
有两种创建方法:动态分配内存、静态分配内存。函数原型如下:
/* 创建一个事件组,返回它的句柄。
* 此函数内部会分配事件组结构体
* 返回值: 返回句柄,非NULL表示成功
*/
EventGroupHandle_t xEventGroupCreate( void );
/* 创建一个事件组,返回它的句柄。
* 此函数无需动态分配内存,所以需要先有一个StaticEventGroup_t结构体,并传入它的指针
* 返回值: 返回句柄,非NULL表示成功
*/
EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer );
2、删除
对于动态创建的事件组,不再需要它们时,可以删除它们以回收内存。
vEventGroupDelete可以用来删除事件组,函数原型如下:
/*
* xEventGroup: 事件组句柄,你要删除哪个事件组
*/
void vEventGroupDelete( EventGroupHandle_t xEventGroup )
3、设置事件
可以设置事件组的某个位、某些位,使用的函数有2个:
- 在任务中使用xEventGroupSetBits()
- 在ISR中使用xEventGroupSetBitsFromISR()
有一个或多个任务在等待事件,如果这些事件符合这些任务的期望,那么任务还会被唤醒。
函数原型如下:
/* 设置事件组中的位
* xEventGroup: 哪个事件组
* uxBitsToSet: 设置哪些位?
* 如果uxBitsToSet的bitX, bitY为1, 那么事件组中的bitX, bitY被设置为1
* 可以用来设置多个位,比如 0x15 就表示设置bit4, bit2, bit0
* 返回值: 返回原来的事件值(没什么意义, 因为很可能已经被其他任务修改了)
*/
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet );
/* 设置事件组中的位
* xEventGroup: 哪个事件组
* uxBitsToSet: 设置哪些位?
* 如果uxBitsToSet的bitX, bitY为1, 那么事件组中的bitX, bitY被设置为1
* 可以用来设置多个位,比如 0x15 就表示设置bit4, bit2, bit0
* pxHigherPriorityTaskWoken: 有没有导致更高优先级的任务进入就绪态? pdTRUE-有, pdFALSE-没有
* 返回值: pdPASS-成功, pdFALSE-失败
*/
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
BaseType_t * pxHigherPriorityTaskWoken );
值得注意的是,ISR中的函数,比如队列函数xQueueSendToBackFromISR、信号量函数xSemaphoreGiveFromISR,它们会唤醒某个任务,最多只会唤醒1个任务。
但是设置事件组时,有可能导致多个任务被唤醒,这会带来很大的不确定性。所以xEventGroupSetBitsFromISR函数不是直接去设置事件组,而是给一个FreeRTOS后台任务(daemon task)发送队列数据,由这个任务来设置事件组。
如果后台任务的优先级比当前被中断的任务优先级高,xEventGroupSetBitsFromISR会设置**pxHigherPriorityTaskWoken*为pdTRUE。
如果daemon task成功地把队列数据发送给了后台任务,那么xEventGroupSetBitsFromISR的返回值就是pdPASS。
4、等待事件
使用xEventGroupWaitBits来等待事件,可以等待某一位、某些位中的任意一个,也可以等待多位;等到期望的事件后,还可以清除某些位。
函数原型如下:
EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait );
先引入一个概念:unblock condition。一个任务在等待事件发生时,它处于阻塞状态;当期望的时间发生时,这个状态就叫"unblock condition",非阻塞条件,或称为"非阻塞条件成立";当"非阻塞条件成立"后,该任务就可以变为就绪态。
函数参数说明列表如下:
| 参数 | 说明 |
|---|---|
| xEventGroup | 等待哪个事件组? |
| uxBitsToWaitFor | 等待哪些位?哪些位要被测试? |
| xWaitForAllBits | 怎么测试?是"AND"还是"OR"? pdTRUE: 等待的位,全部为1; pdFALSE: 等待的位,某一个为1即可 |
| xClearOnExit | 函数提出前是否要清除事件? pdTRUE: 清除uxBitsToWaitFor指定的位 pdFALSE: 不清除 |
| xTicksToWait | 如果期待的事件未发生,阻塞多久。 可以设置为0:判断后即刻返回; 可设置为portMAX_DELAY:一定等到成功才返回; 可以设置为期望的Tick Count,一般用*pdMS_TO_TICKS()*把ms转换为Tick Count |
| 返回值 | 返回的是事件值, 如果期待的事件发生了,返回的是"非阻塞条件成立"时的事件值; 如果是超时退出,返回的是超时时刻的事件值。 |
举例如下:
| 事件组的值 | uxBitsToWaitFor | xWaitForAllBits | 说明 |
|---|---|---|---|
| 0100 | 0101 | pdTRUE | 任务期望bit0,bit2都为1, 当前值只有bit2满足,任务进入阻塞态; 当事件组中bit0,bit2都为1时退出阻塞态 |
| 0100 | 0110 | pdFALSE | 任务期望bit1,bit2某一个为1, 当前值满足,所以任务成功退出 |
| 0100 | 0110 | pdTRUE | 任务期望bit1,bit2都为1, 当前值不满足,任务进入阻塞态; 当事件组中bit1,bit2都为1时退出阻塞态 |
你可以使用*xEventGroupWaitBits()等待期望的事件,它发生之后再使用xEventGroupClearBits()*来清除。但是这两个函数之间,有可能被其他任务或中断抢占,它们可能会修改事件组。
可以使用设置xClearOnExit为pdTRUE,使得对事件组的测试、清零都在*xEventGroupWaitBits()*函数内部完成,这是一个原子操作。
5、同步点
有一个事情需要多个任务协同,比如:
- 任务A:炒菜
- 任务B:买酒
- 任务C:摆台
- A、B、C做好自己的事后,还要等别人做完;大家一起做完,才可开饭
使用*xEventGroupSync()*函数可以同步多个任务:
- 可以设置某位、某些位,表示自己做了什么事
- 可以等待某位、某些位,表示要等等其他任务
- 期望的时间发生后,*xEventGroupSync()*才会成功返回
- xEventGroupSync成功返回后,会清除事件
xEventGroupSync函数原型如下:
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
const EventBits_t uxBitsToWaitFor,
TickType_t xTicksToWait );
参数列表如下:
| 参数 | 说明 |
|---|---|
| xEventGroup | 哪个事件组? |
| uxBitsToSet | 要设置哪些事件?我完成了哪些事件? 比如0x05(二进制为0101)会导致事件组的bit0,bit2被设置为1 |
| uxBitsToWaitFor | 等待那个位、哪些位? 比如0x15(二级制10101),表示要等待bit0,bit2,bit4都为1 |
| xTicksToWait | 如果期待的事件未发生,阻塞多久。 可以设置为0:判断后即刻返回; 可设置为portMAX_DELAY:一定等到成功才返回; 可以设置为期望的Tick Count,一般用*pdMS_TO_TICKS()*把ms转换为Tick Count |
| 返回值 | 返回的是事件值, 如果期待的事件发生了,返回的是"非阻塞条件成立"时的事件值; 如果是超时退出,返回的是超时时刻的事件值。 |
三、示例:广播
本节代码为:23_eventgroup_broadcast,主要看nwatch\game2.c。
car1运行到终点后,会设置bit0事件;car2、car3都等待bit0事件。car1设置bit0事件时,会通知到car2、car3,这就是一个广播作用。
创建事件组,代码如下:
void car_game(void)
{
int i,j;
int x;
g_framebuffer = LCD_GetFrameBuffer(&g_xres, &g_yres, &g_bpp);
draw_init();
draw_end();
xEventCar = xEventGroupCreate();//创建事件组
/* 绘制路标 */
for(i=0;i<3;i++)
{
for(j=0;j<8;j++)
{
draw_bitmap(16*j, 16+17*i, roadMarking, 8, 1, NOINVERT, 0);
draw_flushArea(16*j, 16+17*i, 8, 1);
}
}
#if 0
/* 显示三辆小车 */
for(i=0;i<3;i++)
{
draw_bitmap(cars[i].x, cars[i].y, carImg, 15, 16, NOINVERT, 0);
draw_flushArea(cars[i].x, cars[i].y, 15, 16);
}
#endif
xTaskCreate(car1_task, "car1task", 128, &cars[0], osPriorityNormal, NULL);
xTaskCreate(car2_task, "car2task", 128, &cars[1], osPriorityNormal+2, NULL);
xTaskCreate(car3_task, "car3task", 128, &cars[2], osPriorityNormal+2, NULL); //car2和car3优先级一样后 car1到达最右边后设置事件组 car2和car3得到事件组后一起运行 若优先级不同 则优先级高的先运行 到最右边后再到另一个运行
}
car2等待事件,代码如下:
void car2_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 等待bit0事件 */
xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
/* 这里的delay函数主要是小车的显示延时频率 调用vTaskDelay为阻塞状态 会卡死等待 当执行到调用vTaskDelay的任务时 其他任务能正常运行 调用mdelay则会占用CPU资源 当执行调用mdelay的任务时 其他低优先级任务无法得以运行*/
//vTaskDelay(50);
mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);//car2没有获取信号量 所以当其运行完毕自杀后car1继续运行
vTaskDelete(NULL);
}
}
// }
}
}
car3等待事件,代码如下:
void car3_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 等待bit0事件 */
xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
//vTaskDelay(50);
mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);
vTaskDelete(NULL);
}
}
// }
}
}
car1运行到终点后,设置事件,代码如下:
void car1_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
vTaskDelay(50);
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);
/* 设置bit0 事件组 */
xEventGroupSetBits(xEventCar,(1<<0));
vTaskDelete(NULL);
}
}
// }
}
}
实验现象:car1运行到终点后,car2、car3同时启动。
四、示例:等待一个任意事件
本节代码为:24_eventgroup_or,主要看nwatch\game2.c。
car1运行到终点后,会设置bit0事件;car2运行到终点后,会设置bit1事件;car3等待bit0、bit1的任意一个事件
car1运行到终点后,设置事件,代码如下:
car1运行到终点后,设置事件,代码如下:
void car1_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 获得信号量 */
//xSemaphoreTake(xSemTicks,portMAX_DELAY);//car1获得信号量开始运行
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
vTaskDelay(50);//50ms后开始运行
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);
/* 设置bit0 事件组 */
xEventGroupSetBits(xEventCar,(1<<0));
vTaskDelete(NULL);
}
}
// }
}
}
car2等待事件,代码如下:
void car2_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 获得信号量 */
//xSemaphoreTake(xSemTicks,portMAX_DELAY);
/* 等待bit0事件 */
// xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
vTaskDelay(20);//20ms后开始运行
//mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);//car2没有获取信号量 所以当其运行完毕自杀后car1继续运行
/* 设置bit1 事件组 */
xEventGroupSetBits(xEventCar,(1<<1));
vTaskDelete(NULL);
}
}
// }
}
}
car3等待bit0、bit1事件,实验“或”的关系(倒数第2个参数),代码如下:
void car3_task(void *params)
{
struct car *car = params;
struct ir_Data idata;
/* 创建自己的队列 */
QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));
/* 注册队列 */
RegisterQueueHandle(xQueueIR);
/* 初始化小车 */
ShowCar(car);
/* 获得信号量 */
//xSemaphoreTake(xSemTicks,portMAX_DELAY);
/* 等待bit0 or bit1事件(or或者and取决于第四个参数 pdFLASE为or pdTRUE为and) */
/* 若这里是or 当car1先到时释放事件bit0 此时car3等到事件组则开始运行 car2停止运行 直到car3运行完毕 才到car2继续运行 */
/* 若这里是and 必须car1和car2运行完毕释放bit哦和bit1事件后car3才能运行 */
xEventGroupWaitBits(xEventCar,(1<<0)|(1<<1),pdTRUE,pdTRUE,portMAX_DELAY);
while(1)
{
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);
// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {
if(car->x < g_xres - CAR_LENGTH)
{
/* 隐藏汽车 */
HideCar(car);
/* 调整位置 */
car->x += 1 ;//每次按下右移5个单位
if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)
car->x = g_xres - CAR_LENGTH;//到达最大位置处
/* 重新显示汽车 */
ShowCar(car);
//vTaskDelay(50);
mdelay(50 );
if(car->x == g_xres - CAR_LENGTH)
{
/* 汽车到达最右边 释放信号量 */
//xSemaphoreGive(xSemTicks);
vTaskDelete(NULL);
}
}
// }
}
}
五、示例: 等待多个事件都发生
本节代码为:25_eventgroup_and,主要看nwatch\game2.c。
使用遥控器控制car1、car2。car1运行到终点后,会设置bit0事件;car2运行到终点后,会设置bit1事件;car3等待bit0、bit1的所有事件
跟24_eventgroup_or相比,只是car3的代码发生了变化。car3等待bit0、bit1事件,实验“与”的关系(倒数第2个参数),代码如下:
225 /* 等待事件:bit0 or bit1 */
226 xEventGroupWaitBits(g_xEventCar, (1<<0)|(1<<1), pdTRUE, pdTRUE, portMAX_DELAY);
实验现象:实验遥控器的1、2控制car1、car2,它们都到达终点后,car3才会启动。















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









