






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
粒子群算法(Particle Swarm Optimization,PSO)是一种启发式优化算法,灵感来源于鸟群或鱼群的群体行为。 PSO算法模拟了鸟群或鱼群中个体之间的社会行为,通过合作和信息共享来搜索最优解。 算法通过维护一群粒子(即潜在解决方案),每个粒子代表搜索空间中的一个潜在解。 每个粒子根据其当前位置和速度以及邻居粒子和全局最优解的信息,更新自身位置和速度。
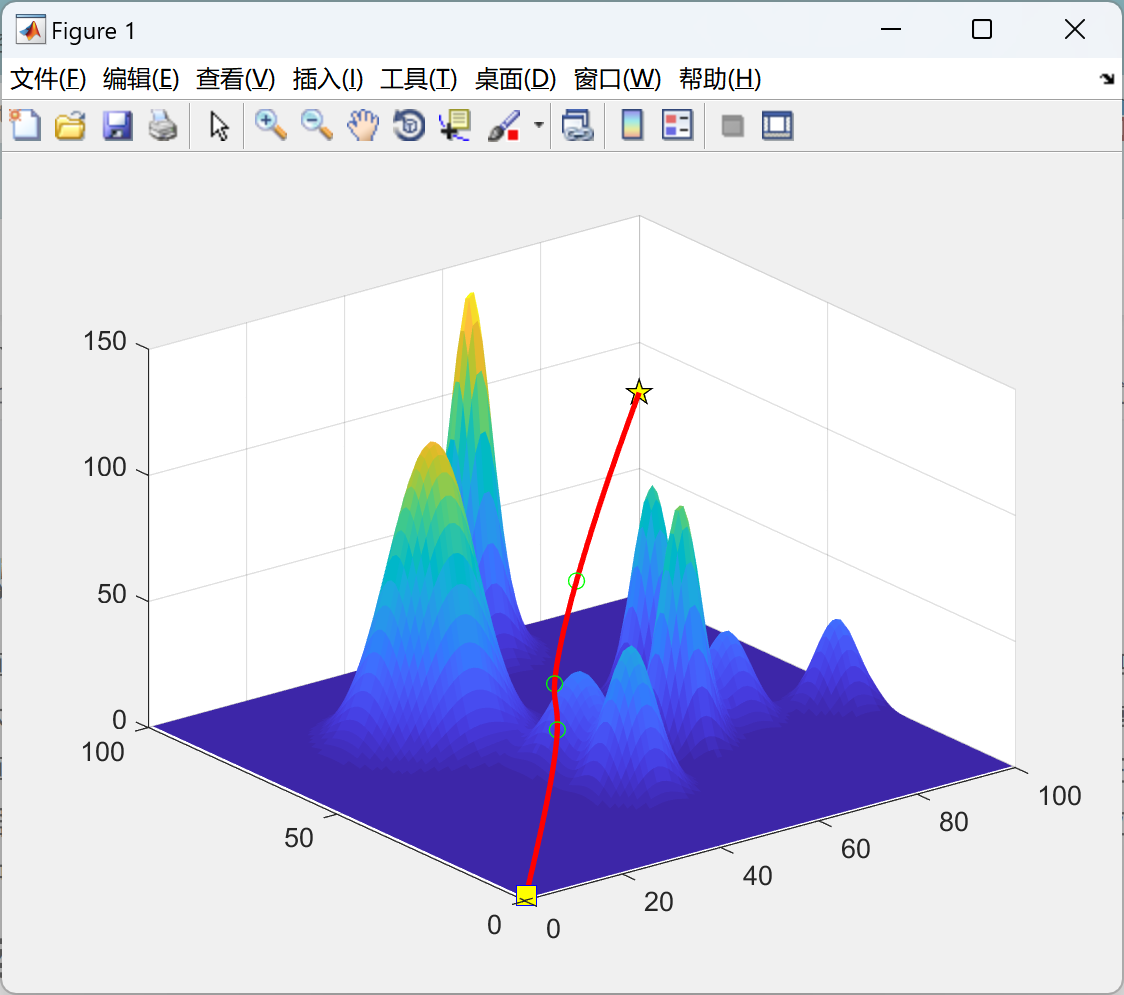
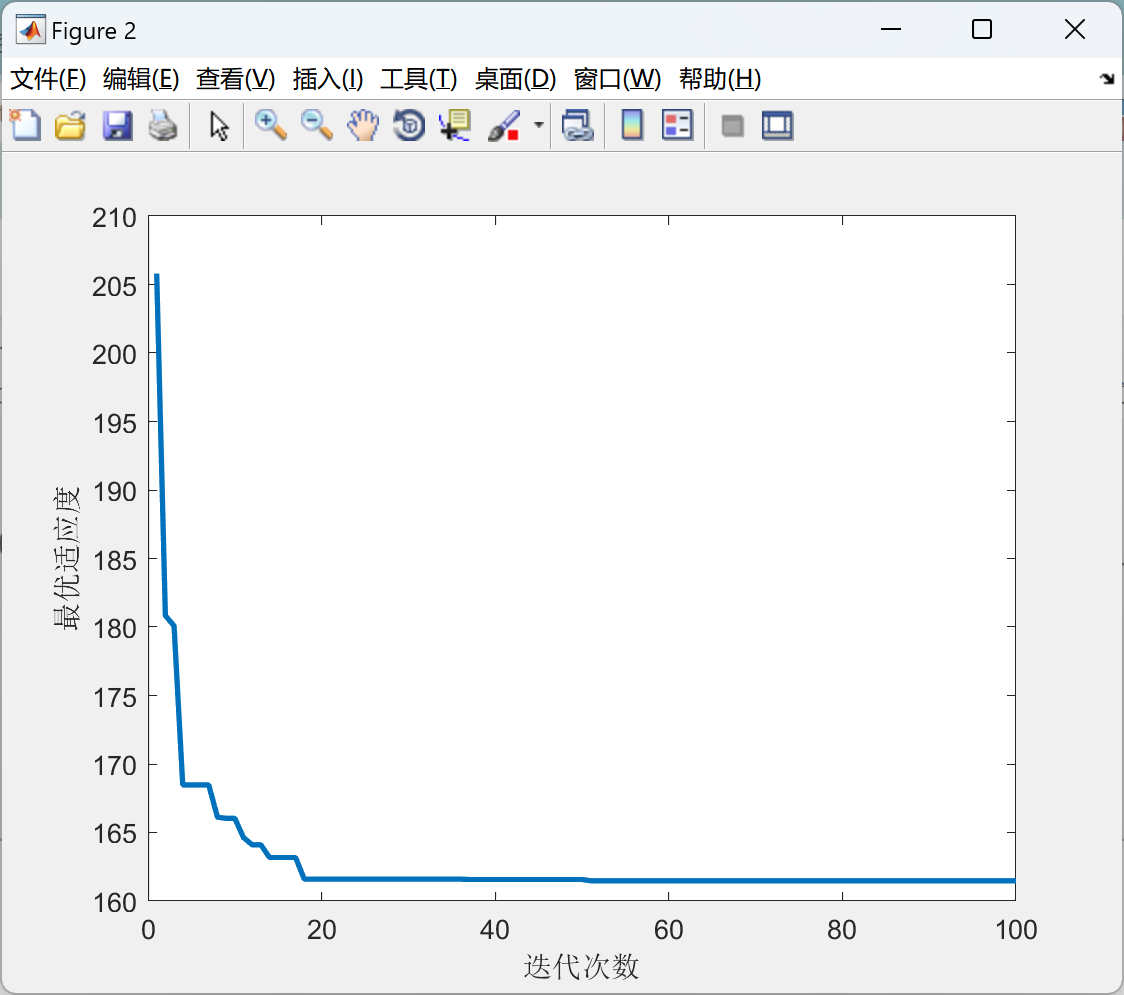
📚2 运行结果
主函数部分代码:
clc
clear
close all
%% 三维路径规划模型定义
startPos = [1, 1, 1];
goalPos = [100, 100, 80];
% 随机定义山峰地图
mapRange = [100,100,100]; % 地图长、宽、高范围
[X,Y,Z] = defMap(mapRange);
%% 初始参数设置
N = 100; % 迭代次数
M = 50; % 粒子数量
pointNum = 3; % 每一个粒子包含三个位置点
w = 1.2; % 惯性权重
c1 = 2; % 社会权重
c2 = 2; % 认知权重
% 粒子位置界限
posBound = [[0,0,0]',mapRange'];
% 粒子速度界限
alpha = 0.1;
velBound(:,2) = alpha*(posBound(:,2) - posBound(:,1));
velBound(:,1) = -velBound(:,2);
%% 种群初始化
% 初始化一个空的粒子结构体
particles.pos= [];
particles.v = [];
particles.fitness = [];
particles.path = [];
particles.Best.pos = [];
particles.Best.fitness = [];
particles.Best.path = [];
% 定义M个粒子的结构体
particles = repmat(particles,M,1);
% 初始化每一代的最优粒子
GlobalBest.fitness = inf;
% 第一代的个体粒子初始化
for i = 1:M
% 粒子按照正态分布随机生成
particles(i).pos.x = unifrnd(posBound(1,1),posBound(1,2),1,pointNum);
particles(i).pos.y = unifrnd(posBound(2,1),posBound(2,2),1,pointNum);
particles(i).pos.z = unifrnd(posBound(3,1),posBound(3,2),1,pointNum);
% 初始化速度
particles(i).v.x = zeros(1, pointNum);
particles(i).v.y = zeros(1, pointNum);
particles(i).v.z = zeros(1, pointNum);
% 适应度
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]肖应学,何超,包广元.基于二次规划的智能网联汽车路径规划算法[J/OL].机电工程技术:1-6[2024-04-21].http://kns.cnki.net/kcms/detail/44.1522.TH.20240408.2008.002.html.
[2]张国胜,李彩虹,张耀玉,等.基于改进人工势场法的机器人局部路径规划[J/OL].计算机工程:1-9[2024-04-21].https://doi.org/10.19678/j.issn.1000-3428.0068738.















 2583
2583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









