






 本文介绍了PID参数(KP、Ti和Td)在控制系统中的作用,强调了如何根据系统需求调整以优化稳定性、响应速度和精度,同时指出参数间相互影响的重要性。还提及了PID控制的基本实现,如设定量、实时状态量和时间间隔的应用。
本文介绍了PID参数(KP、Ti和Td)在控制系统中的作用,强调了如何根据系统需求调整以优化稳定性、响应速度和精度,同时指出参数间相互影响的重要性。还提及了PID控制的基本实现,如设定量、实时状态量和时间间隔的应用。
PID参数的整定就是合理的选择PID三参数。从系统的稳定性、响应速度,超调量和稳态精度等各方面考虑问题,三参数的作用如下: 1、比例参数KP的作用是加快系统的响应速度,提高系统的调节精度。随着KP的增大系统的响应速度越快,系统的调节精度越高,但是系统易产生超调,系统的稳定性变差,甚至会导致系统不稳定。KP取值过小,调节精度降低,响应速度变慢,调节时间加长,使系统的动静态性能变坏。 2、积分作用参数Ti的一个最主要作用是消除系统的稳态误差。Ti越大系统的稳态误差消除的越快,但Ti也不能过大,否则在响应过程的初期会产生积分饱和现象。若Ti过小,系统的稳态误差将难以消除,影响系统的调节精度。另外在控制系统的前向通道中只要有积分环节总能做到稳态无静差。从相位的角度来看一个积分环节就有90° 的相位延迟,也许会破坏系统的稳定性。 3、微分作用参数Td的作用是改善系统的动态性能,其主要作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但Td不能过大,否则会使响应过程提前制动,延长调节时间,并且会降低系统的抗干扰性能。 总之PID参数的整定必须考虑在不同时刻三个参数的作用以及相互之间的互联关系
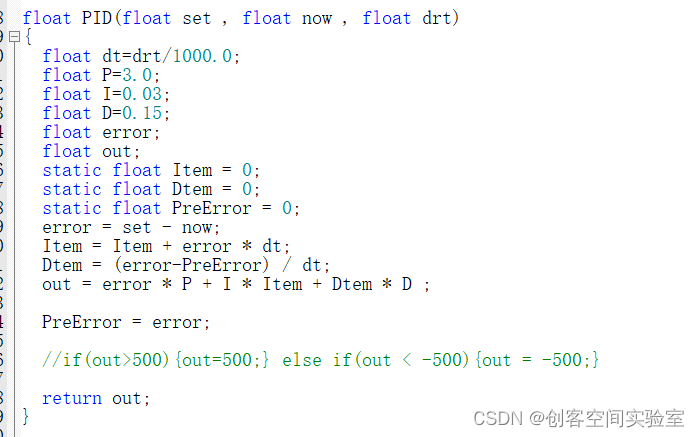

瞎jb写点,第一张图就是pid的简单实现,各个参数都是什么有什么用就不细说了,网上都有,简单说一下怎么用。
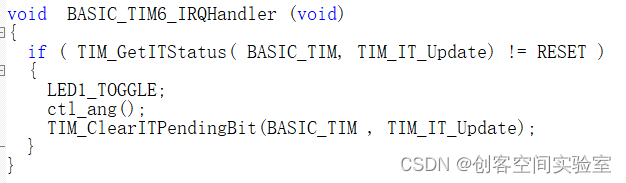
第一个值是设定量,第二个值是实时状态量,第三个值为时间,在这里我设置了定时器每10ms就产生一次中断,就运行一下控制函数,所以这里时间填10.
这几句简单的代码会根据目标值与实时值的差异去做一个线性变化,相比于直接的改变更加牛逼。
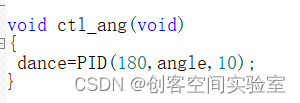
直接cv进去就可以了,PID函数的目标值可以设定为角度,或者目标速度。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









