






一,第15届嵌入式省赛原题
https://www.lanqiao.cn/courses/2786/learning/?id=2871328&compatibility=false
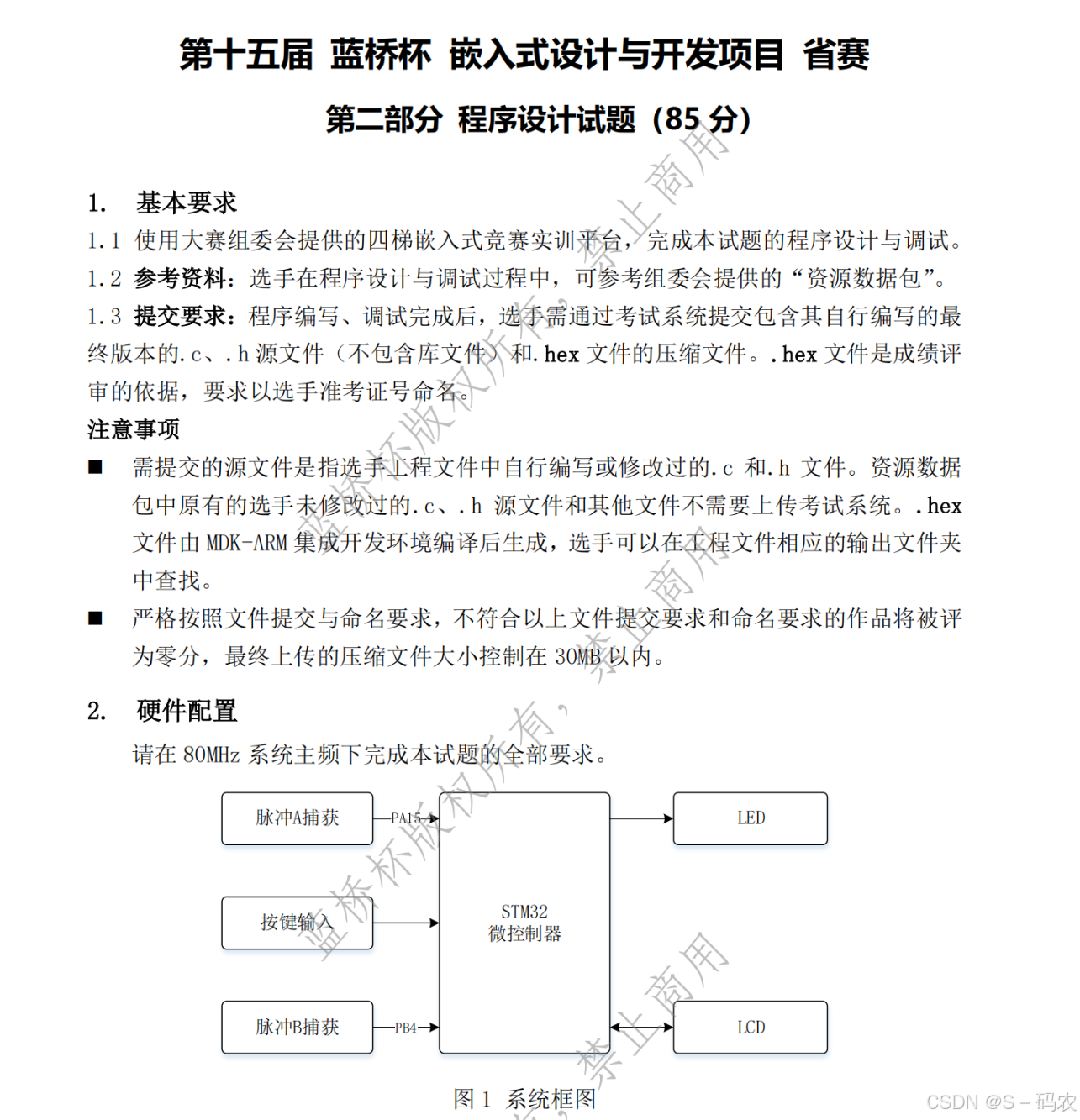
原题的具体内容前往官网查看https://www.lanqiao.cn/courses/2786/learning/?id=2871328&compatibility=false
二.CubeMax配置
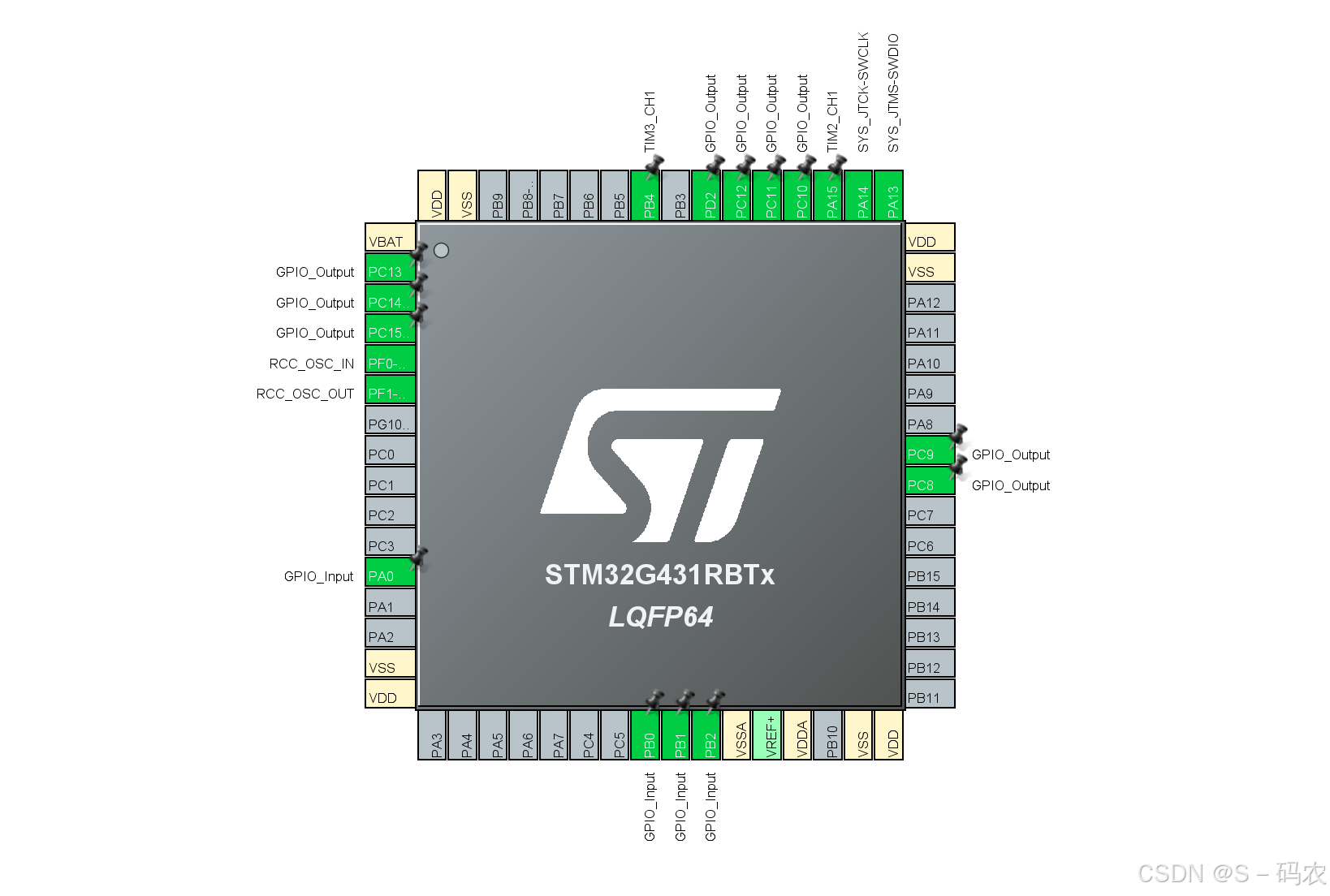
1.所需要的引脚
(LCD屏幕的引脚不需要在CubeMax配置,官方提供的LCD的驱动里面包含对引脚的配置)
2、配置SYS-Debug_Serial Wire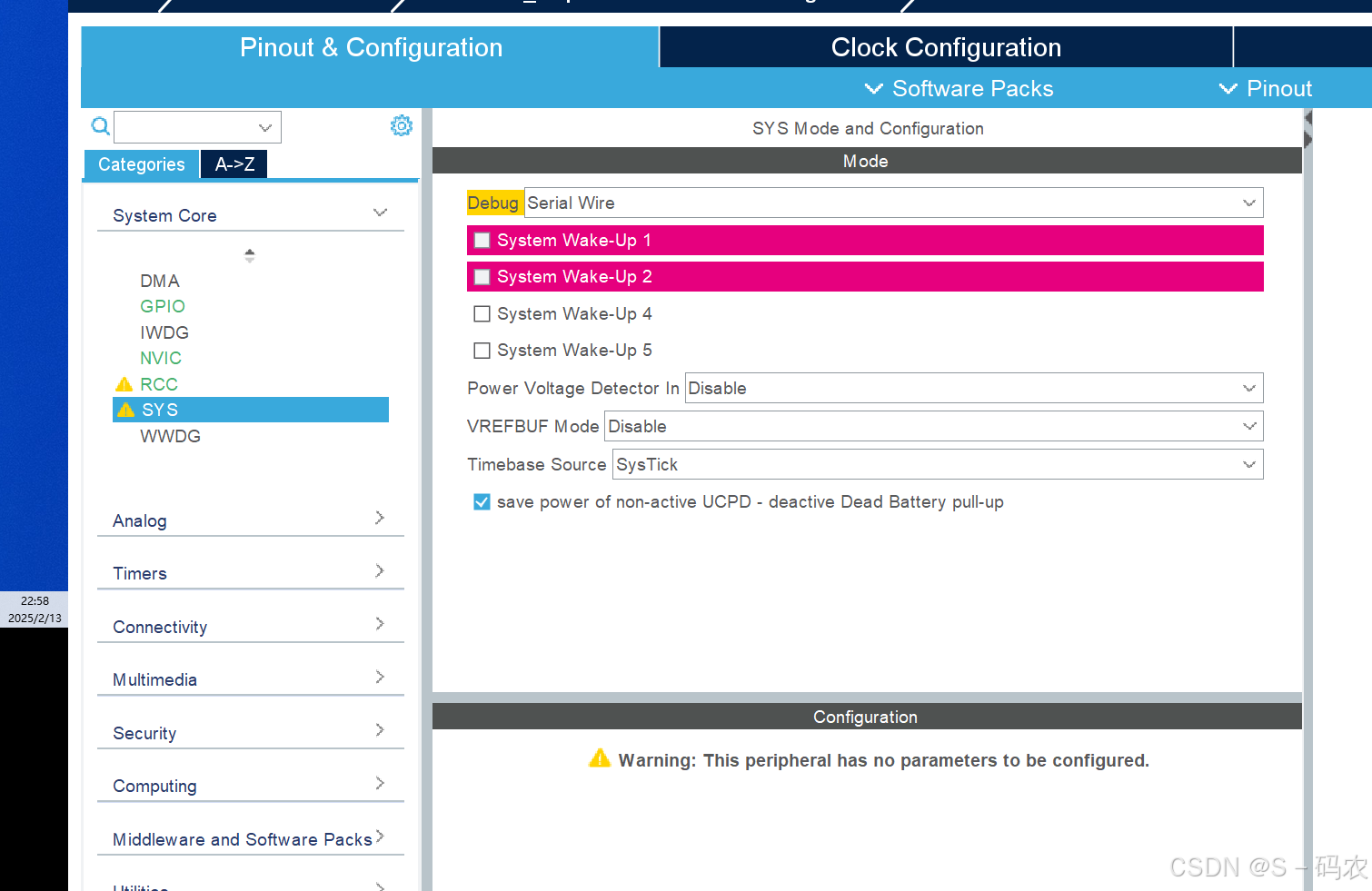
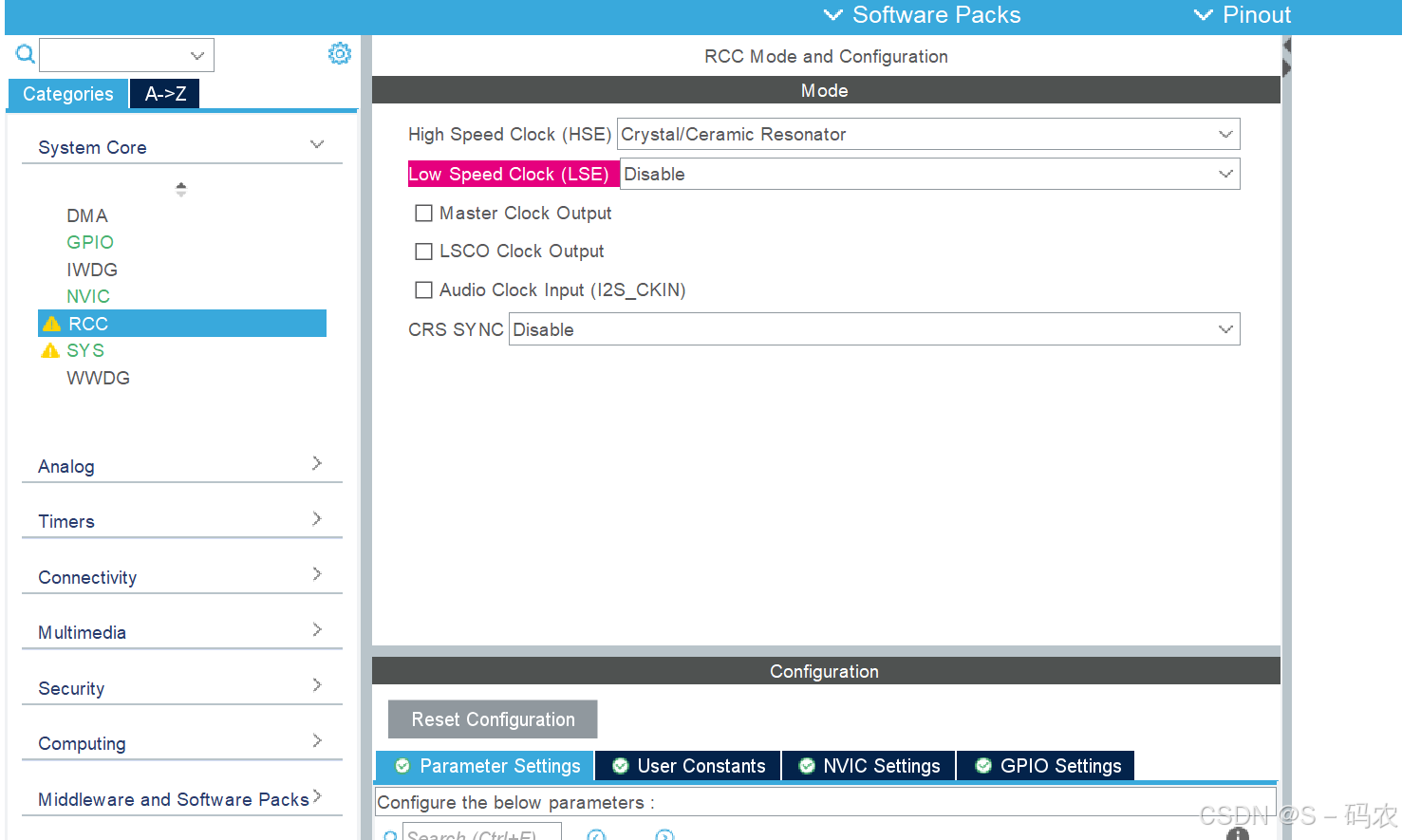
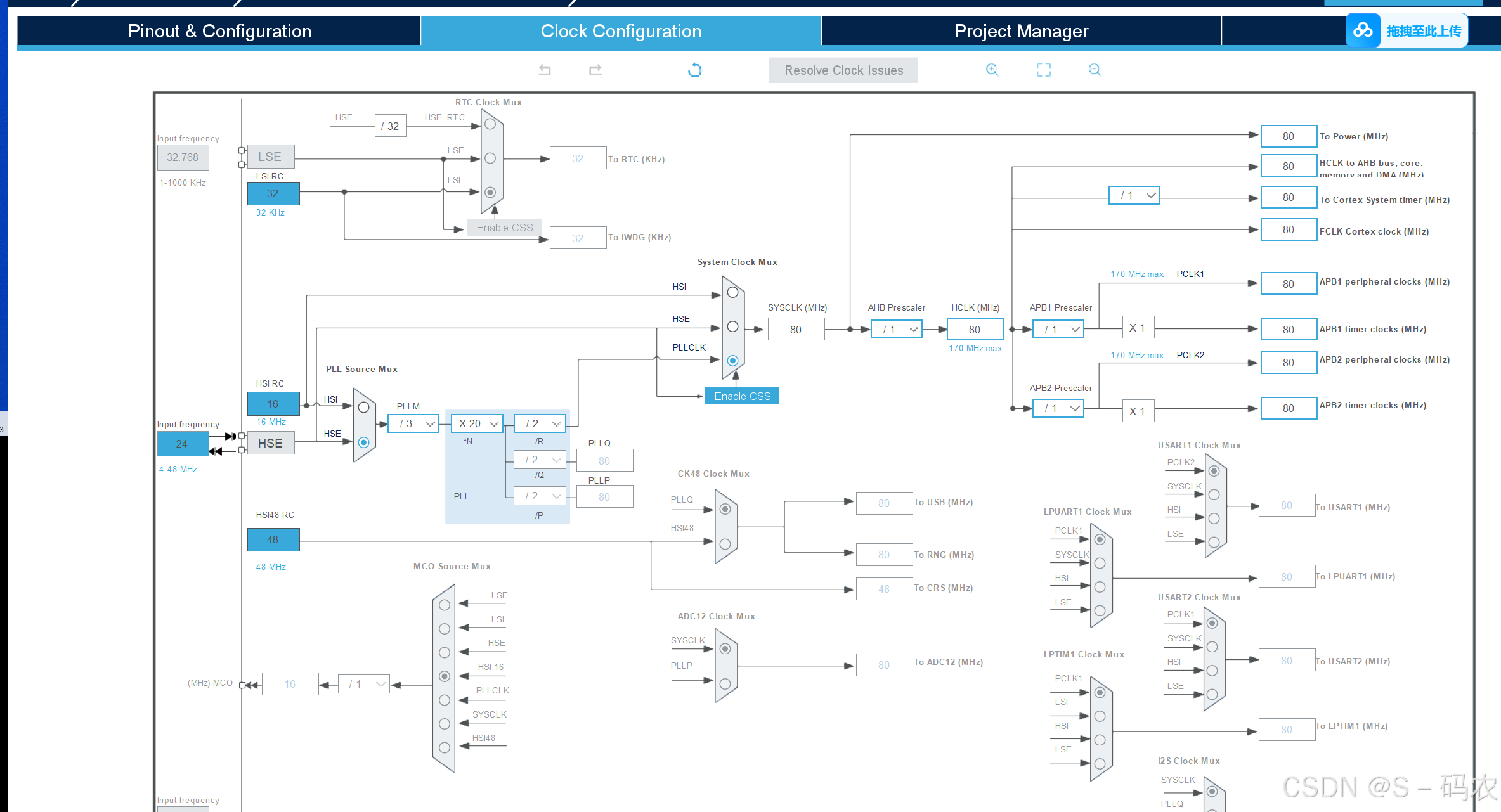
3.配置RCC --> High Spee Clock(HSE) -> Crystal/Ceramic Resonator
 4. 配置时钟数
4. 配置时钟数
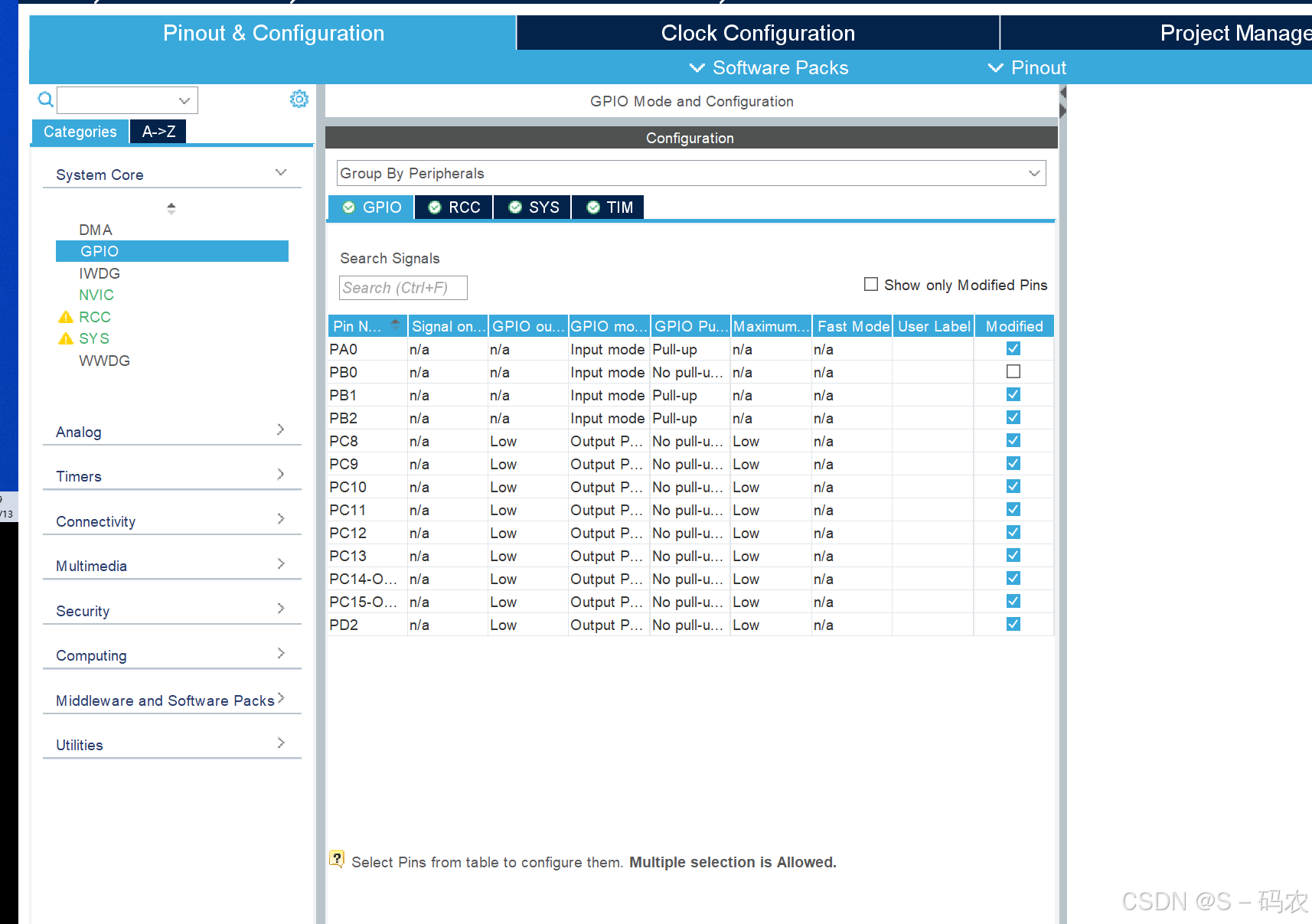
5.配置GPIO
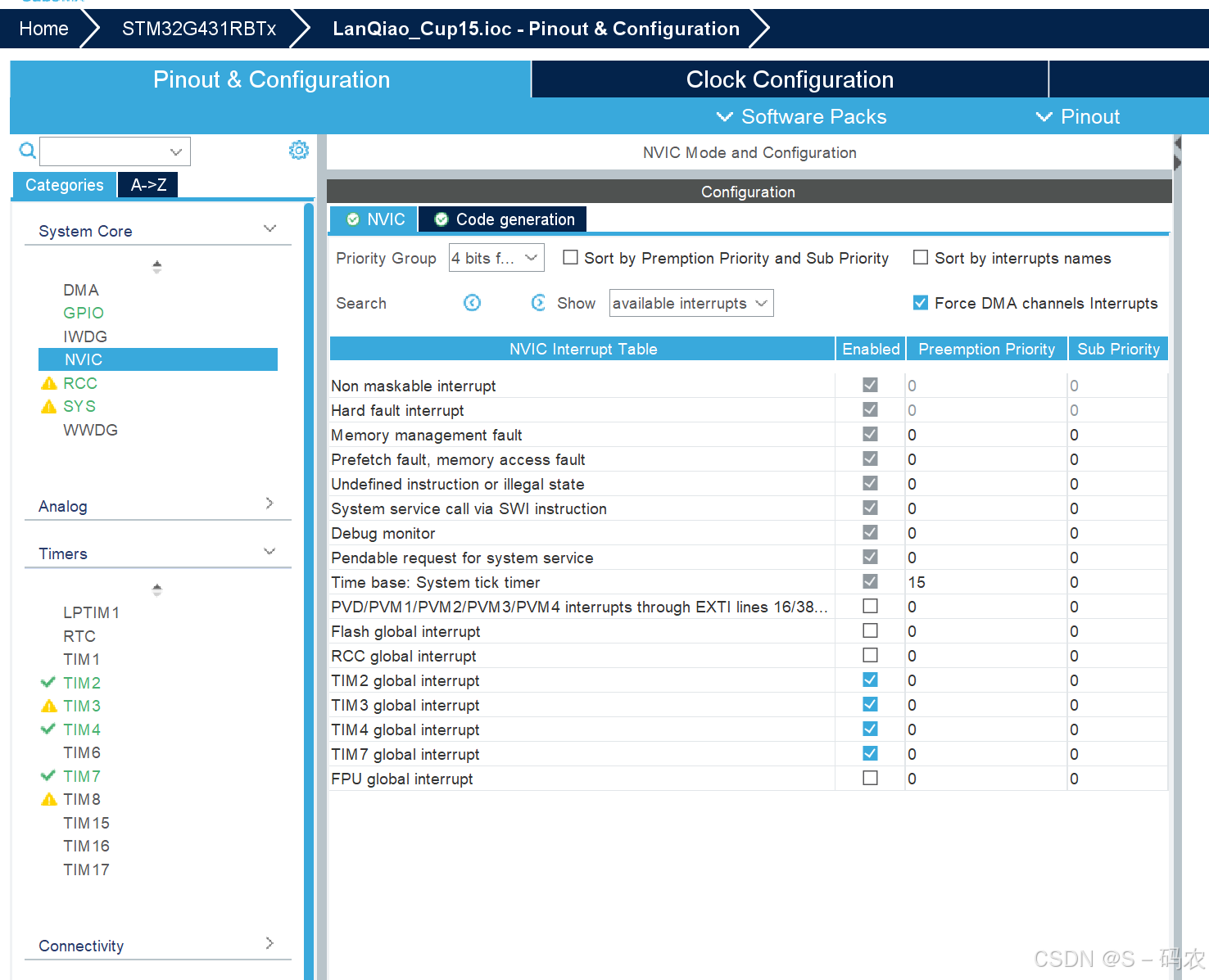
6.配置NVIC
(这个不需要单独去配置的,在配置对应的外设的时候打开中断就可以了)
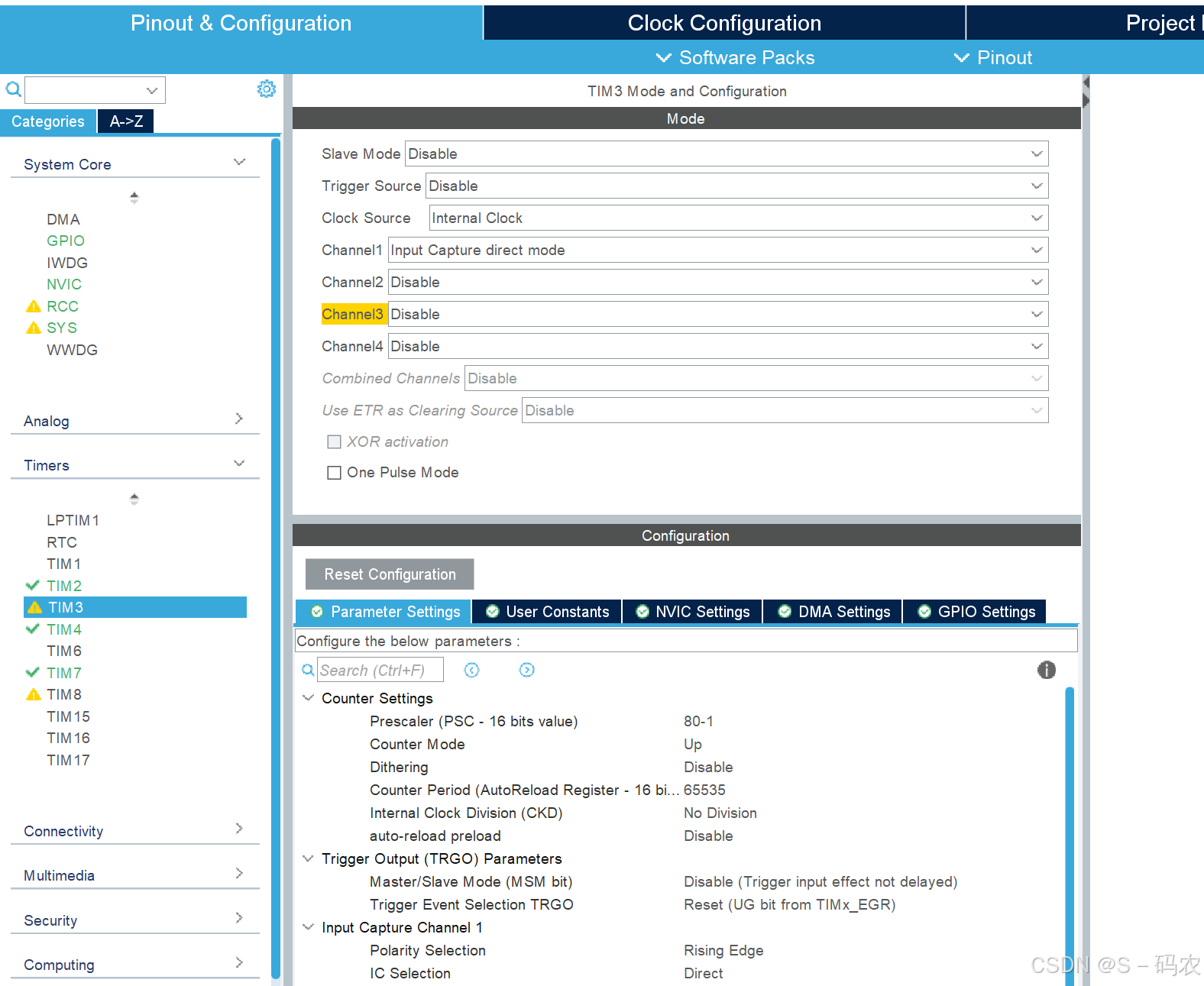
7.配置定时器
(1.)TIM2 --输入捕获模式.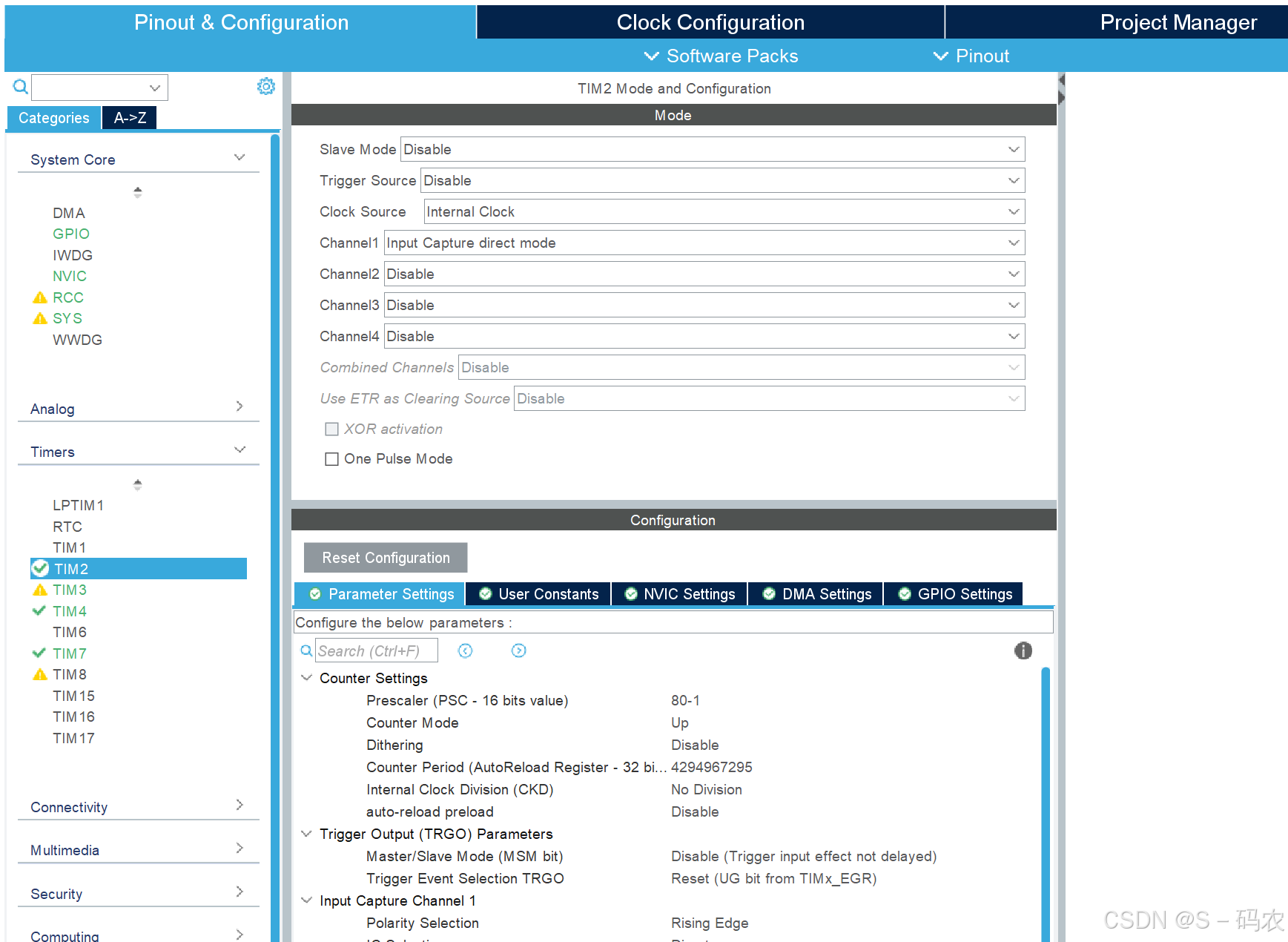 (2.)TIM3 -- 配置为输入捕获模式
(2.)TIM3 -- 配置为输入捕获模式
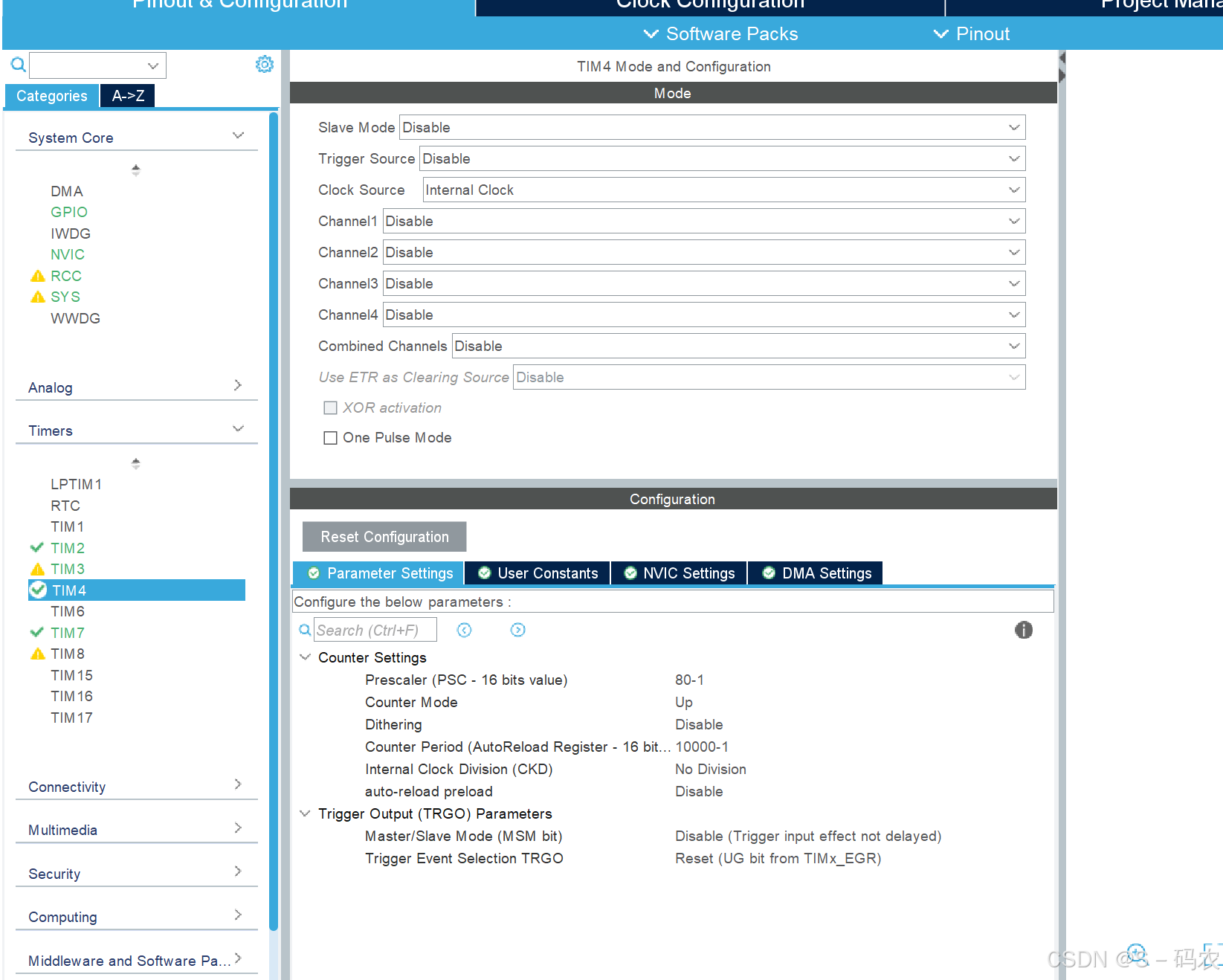
(3.)TIM4--配置为普通模式,用于按键的延时
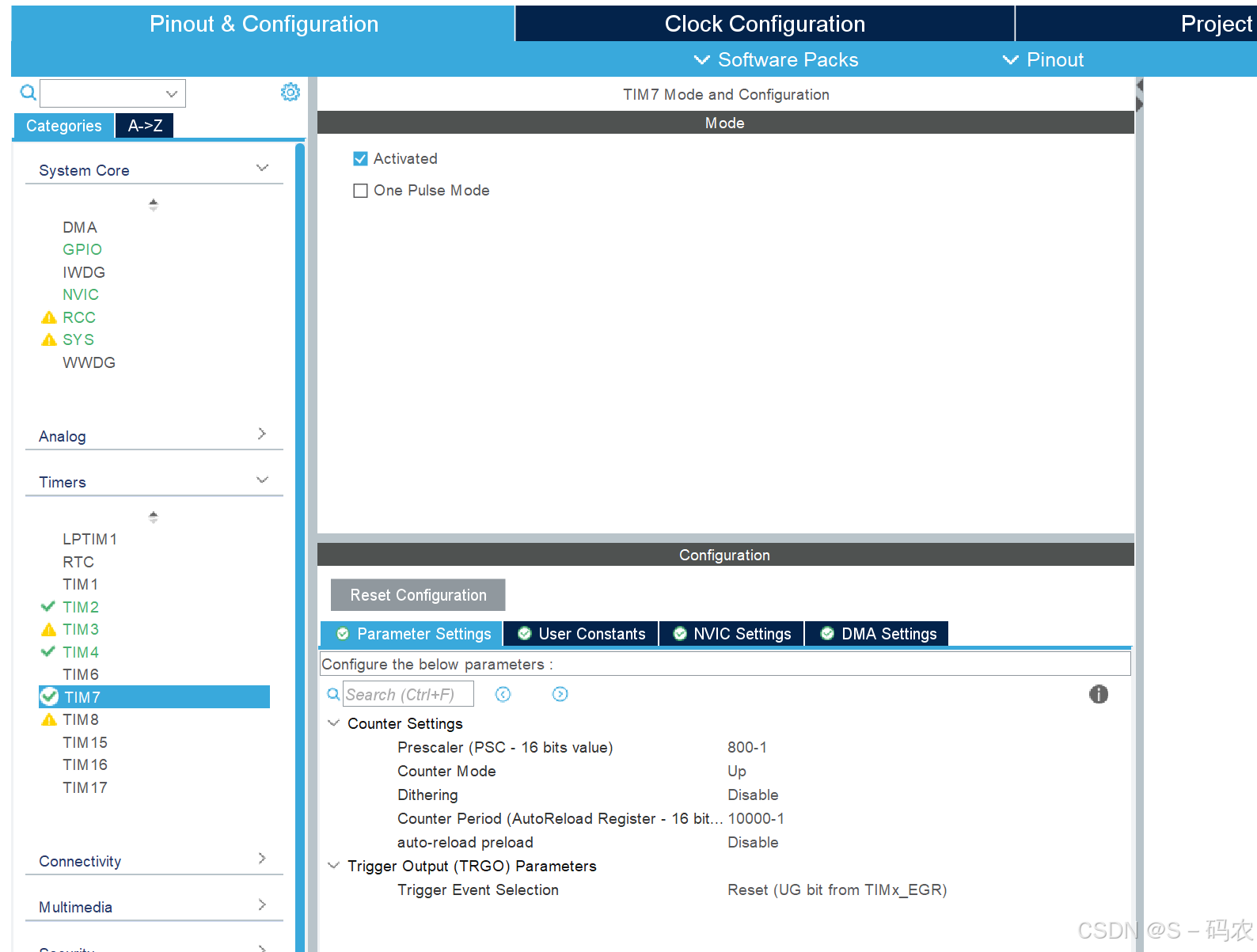
(4.)TIM7
三.代码部分
(1.)主函数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "lcd.h"
#include "LED.h"
#include "stdio.h"
#include "Interrupt.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
extern double FRQ_A;
extern double FRQ_B;
extern double PRD_A;
extern double PRD_B;
extern double FRQ_A_cha;
extern double FRQ_B_cha;
uint32_t PD = 1000;
uint32_t PH = 5000;
int32_t PX = 0;
extern struct keys key[4];
uint8_t page = 0;
uint8_t page_DATA_flg = 0;
uint8_t page_PARA_flg = 0;
uint8_t chose_PX_PH_PD = 0;
uint8_t FPQ_A_PH_flg = 0;
uint8_t FPQ_B_PH_flg = 0;
uint16_t NDA = 0;
uint16_t NDB = 0;
uint16_t NHA = 0;
uint16_t NHB = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_config(void);
void LCD_congif(void);
void Data_config(void);
void LED_config(void);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM7_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_TIM4_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim7);
HAL_TIM_Base_Start_IT(&htim4);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
LCD_Init();
LED_Show(0x00);
LCD_Clear(Black);
LCD_SetTextColor(White);
LCD_SetBackColor(Black);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
key_config();
LCD_congif();
Data_config();
LED_config();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void key_config(void)
{
//按键1
if(key[0].key_dan_flg == 1)
{
key[0].key_dan_flg = 0;
if(page_PARA_flg == 1)
{
if(chose_PX_PH_PD % 3 == 0)
PD += 100;
if(chose_PX_PH_PD % 3 == 1)
PH += 100;
if(chose_PX_PH_PD % 3 == 2)
PX +=100;
}
}
//按键2
if(key[1].key_dan_flg == 1)
{
key[1].key_dan_flg = 0;
if(page_PARA_flg == 1)
{
if(chose_PX_PH_PD % 3 == 0)
PD -= 100;
if(chose_PX_PH_PD % 3 == 1)
PH -= 100;
if(chose_PX_PH_PD % 3 == 2)
PX -=100;
}
}
//按键3
if(key[2].key_dan_flg == 1)
{
key[2].key_dan_flg = 0;
if(page % 3 == 0)
{
page_DATA_flg += 1;
}
if(page_PARA_flg == 1)
{
chose_PX_PH_PD += 1;
}
}
//按键4
if(key[3].key_dan_flg == 1)
{
key[3].key_dan_flg = 0;
page += 1;
}
//按键4长按
if(key[2].key_long_flg == 1)
{
key[2].key_long_flg = 0;
if(page % 3 == 2)
{
NDA = 0;
NDB = 0;
NHA = 0;
NHB = 0;
}
}
}
void LCD_congif(void)
{
//DATA界面
if(page % 3 == 0)
{
char arr[32] = {" "};
sprintf(arr," DATA ");
LCD_DisplayStringLine(Line1,(uint8_t *)arr);
sprintf(arr," ");
LCD_DisplayStringLine(Line5,(uint8_t *)arr);
sprintf(arr," ");
LCD_DisplayStringLine(Line6,(uint8_t *)arr);
//显示频率
if(page_DATA_flg % 2 == 0)
{
if(FRQ_A >= 0 && FRQ_A <= 1000)
{
sprintf(arr," A=%.0fHz ",FRQ_A);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
if(FRQ_A > 1000)
{
sprintf(arr," A=%.2fKHz ",FRQ_A / 1000);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
if(FRQ_B >= 0 && FRQ_B <= 1000)
{
sprintf(arr," B=%.0fKHz ",FRQ_B);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
if(FRQ_B > 1000)
{
sprintf(arr," B=%.2fKHz ",FRQ_B / 1000);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
if(FRQ_A < 0)
{
sprintf(arr," A=NULL ");
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
if(FRQ_B < 0)
{
sprintf(arr," B=NULL ");
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
}
//显示周期
if(page_DATA_flg % 2 == 1)
{
sprintf(arr," ");
LCD_DisplayStringLine(Line6,(uint8_t *)arr);
if(FRQ_A >= 0)
{
if(PRD_A <= 1000 )
{
sprintf(arr," A=%.0fuS ",PRD_A);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
if(PRD_A > 1000 )
{
sprintf(arr," A=%.2fmS ",PRD_A / 1000);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
}
if(FRQ_B >= 0)
{
if(PRD_B <= 1000 )
{
sprintf(arr," B=%.0fuS ",PRD_B);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
if(PRD_B > 1000 )
{
sprintf(arr," B=%.2fmS ",PRD_B / 1000);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
}
if(FRQ_A < 0)
{
sprintf(arr," A=NULL ");
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
}
if(FRQ_B < 0)
{
sprintf(arr," B=NULL ");
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
}
}
}
else
{
page_DATA_flg = 0;
}
//PARA界面
if(page % 3 == 1)
{
page_PARA_flg = 1;
char arr[32] = {" "};
sprintf(arr," PARA ");
LCD_DisplayStringLine(Line1,(uint8_t *)arr);
sprintf(arr," PD=%dHz ",PD);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
sprintf(arr," PH=%dHz ",PH);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
sprintf(arr," PX=%dHz ",PX);
LCD_DisplayStringLine(Line5,(uint8_t *)arr);
}
else
{
page_PARA_flg = 0;
chose_PX_PH_PD = 0;
}
//RECD界面
if(page % 3 == 2)
{
char arr[32] = {" "};
sprintf(arr," RECD ");
LCD_DisplayStringLine(Line1,(uint8_t *)arr);
sprintf(arr," NDA=%d ",NDA);
LCD_DisplayStringLine(Line3,(uint8_t *)arr);
sprintf(arr," NDB=%d ",NDB);
LCD_DisplayStringLine(Line4,(uint8_t *)arr);
sprintf(arr," NHA=%d ",NHA);
LCD_DisplayStringLine(Line5,(uint8_t *)arr);
sprintf(arr," NHB=%d ",NHB);
LCD_DisplayStringLine(Line6,(uint8_t *)arr);
}
}
void Data_config(void)
{
if(PD < 100)
PD = 1000;
if(PD > 1000)
PD = 100;
if(PH < 1000)
PH = 10000;
if(PH > 10000)
PH = 1000;
if(PX < -1000)
PX = 1000;
if(PX > 1000)
PX = -1000;
if(FRQ_A >= PH && FPQ_A_PH_flg == 0)
{
NHA += 1;
FPQ_A_PH_flg = 1;
}
if(FRQ_A < PH )
FPQ_A_PH_flg = 0;
if(FRQ_B >= PH && FPQ_B_PH_flg == 0)
{
NHB += 1;
FPQ_B_PH_flg = 1;
}
if(FRQ_B < PH )
FPQ_B_PH_flg = 0;
}
void LED_config(void)
{
if((page % 3 == 0 ) && (FRQ_A > PH) && (FRQ_B > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x87);
}
else if((page % 3 == 0 ) && (FRQ_A > PH) && (FRQ_B > PH))
{
LED_Show(0x07);
}
else if((page % 3 == 0 ) && (FRQ_A > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x83);
}
else if((page % 3 == 0 ) && (FRQ_B > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x85);
}
else if((FRQ_A > PH) && (FRQ_B > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x86);
}
else if((page % 3 == 0 ) && (FRQ_A > PH))
{
LED_Show(0x03);
}
else if((page % 3 == 0 ) && (FRQ_B > PH))
{
LED_Show(0x05);
}
else if((page % 3 == 0 ) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x81);
}
else if((FRQ_A > PH) && (FRQ_B > PH))
{
LED_Show(0x06);
}
else if((FRQ_A > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x82);
}
else if((FRQ_B > PH) && (NDA >= 3 || NDB >= 3))
{
LED_Show(0x84);
}
else if(page % 3 == 0 )
{
LED_Show(0x01);
}
else if(FRQ_A > PH)
{
LED_Show(0x02);
}
else if(FRQ_B > PH)
{
LED_Show(0x04);
}
else if(NDA >= 3 || NDB >= 3)
{
LED_Show(0x80);
}
else
{
LED_Show(0x00);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
(2.)中断回调函数
#include "stm32g4xx_hal.h"
#include "Interrupt.h"
struct keys key[4]={0,0,0,0,0};
double FRQ_A = 0.0;
uint32_t count_tim2 = 0;
double FRQ_B = 0.0;
uint32_t count_tim3 = 0;
double PRD_A = 0.0;
double PRD_B = 0.0;
extern int32_t PX;
extern uint32_t PD;
extern uint16_t NDA;
extern uint16_t NDB;
double FRQ_A_MAX = 0.0;
double FRQ_B_MAX = 0.0;
double FRQ_A_MIN = 0.0;
double FRQ_B_MIN = 0.0;
double FRQ_A_cha = 0.0;
double FRQ_B_cha = 0.0;
uint32_t time_count = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM7)
{
key[0].key_start=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_start=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_start=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_start=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(uint8_t i=0;i<4;i++)
{
switch(key[i].key_jude)
{
case 0:
{
if(key[i].key_start == 0) //低电平按下
{
key[i].key_time = 0;
key[i].key_jude = 1;
}
}
break;
case 1:
{
if(key[i].key_start == 0)
key[i].key_jude = 2;
else
key[i].key_jude =0;
}
break;
case 2:
{
if(key[i].key_start == 1)
{
if(key[i].key_time < 100)
{
key[i].key_dan_flg = 1;
}
key[i].key_jude = 0;
}
else
{
key[i].key_time += 1;
if(key[i].key_time >= 100)
{
key[i].key_long_flg = 1;
key[i].key_jude = 0;
}
}
}
break;
}
}
}
//0.1秒进一次中断
if(htim->Instance==TIM4)
{
time_count ++;
if(FRQ_A_MAX < FRQ_A)
FRQ_A_MAX = FRQ_A;
if(FRQ_A_MIN > FRQ_A || FRQ_A_MIN == 0)
FRQ_A_MIN = FRQ_A;
if(FRQ_B_MAX < FRQ_B)
FRQ_B_MAX = FRQ_B;
if(FRQ_B_MIN > FRQ_B || FRQ_B_MIN == 0)
FRQ_B_MIN = FRQ_B;
//每3秒获取一个频率的最大值和最小值
if(time_count % 30 == 0)
{
FRQ_A_cha = FRQ_A_MAX - FRQ_A_MIN;
FRQ_B_cha = FRQ_B_MAX - FRQ_B_MIN;
if(FRQ_A_cha > PD)
NDA += 1;
if(FRQ_B_cha > PD)
NDB += 1;
FRQ_A_MAX = 0;
FRQ_A_MIN = 0;
FRQ_B_MAX = 0;
FRQ_B_MIN = 0;
time_count = 0;
}
}
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
count_tim2 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
__HAL_TIM_SET_COUNTER(htim,0);
FRQ_A = (80000000 / 80.0 ) / count_tim2 + PX;
PRD_A = 1 * 1000000.0 / FRQ_A ;
HAL_TIM_IC_Start_IT(htim,TIM_CHANNEL_1);
}
if(htim->Instance == TIM3)
{
count_tim3 = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
__HAL_TIM_SET_COUNTER(htim,0);
FRQ_B = (80000000 / 80.0 ) / count_tim3 + PX;
PRD_B = 1 * 1000000.0 / FRQ_B;
HAL_TIM_IC_Start_IT(htim,TIM_CHANNEL_1);
}
}
(3)LED的驱动
#include "stm32g4xx_hal.h"
#include "LED.h"
void LED_Disp(uint8_t dsLED)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,dsLED << 8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}四.源码工程链接

通过网盘分享的文件:LanQian_Cup15_2.zip
链接: https://pan.baidu.com/s/1s6LzBOLn9GXps8-dSWU1iA?pwd=sw46 提取码: sw46

















 7977
7977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









