






目录
前言
直流电机是一种能够将直流电能与机械能相互转换的旋转电机,主要分为直流电动机(将电能转为机械能)和直流发电机(将机械能转为电能)。其核心结构包括定子(静止部分,含主磁极和换向极,产生磁场)和转子(旋转部分,又称电枢,通过电磁感应产生转矩)。工作原理基于电磁感应定律:通电导体在磁场中受力旋转(遵循弗莱明左手定则),而换向器与电刷的配合确保电流方向周期性变化,使转子持续旋转。直流电机可分为有刷电机(依赖电刷和换向器,结构简单但寿命较短)和无刷电机(采用电子换向,高效耐用但成本较高),广泛应用于工业控制、电动汽车、机器人及精密设备等领域,其调速性能优、启停灵活,但需注意有刷电机的电刷磨损及火花问题。
直流电机属于大功率器件,GPIO口无法直接驱动,需要配合电机驱动电路来操作

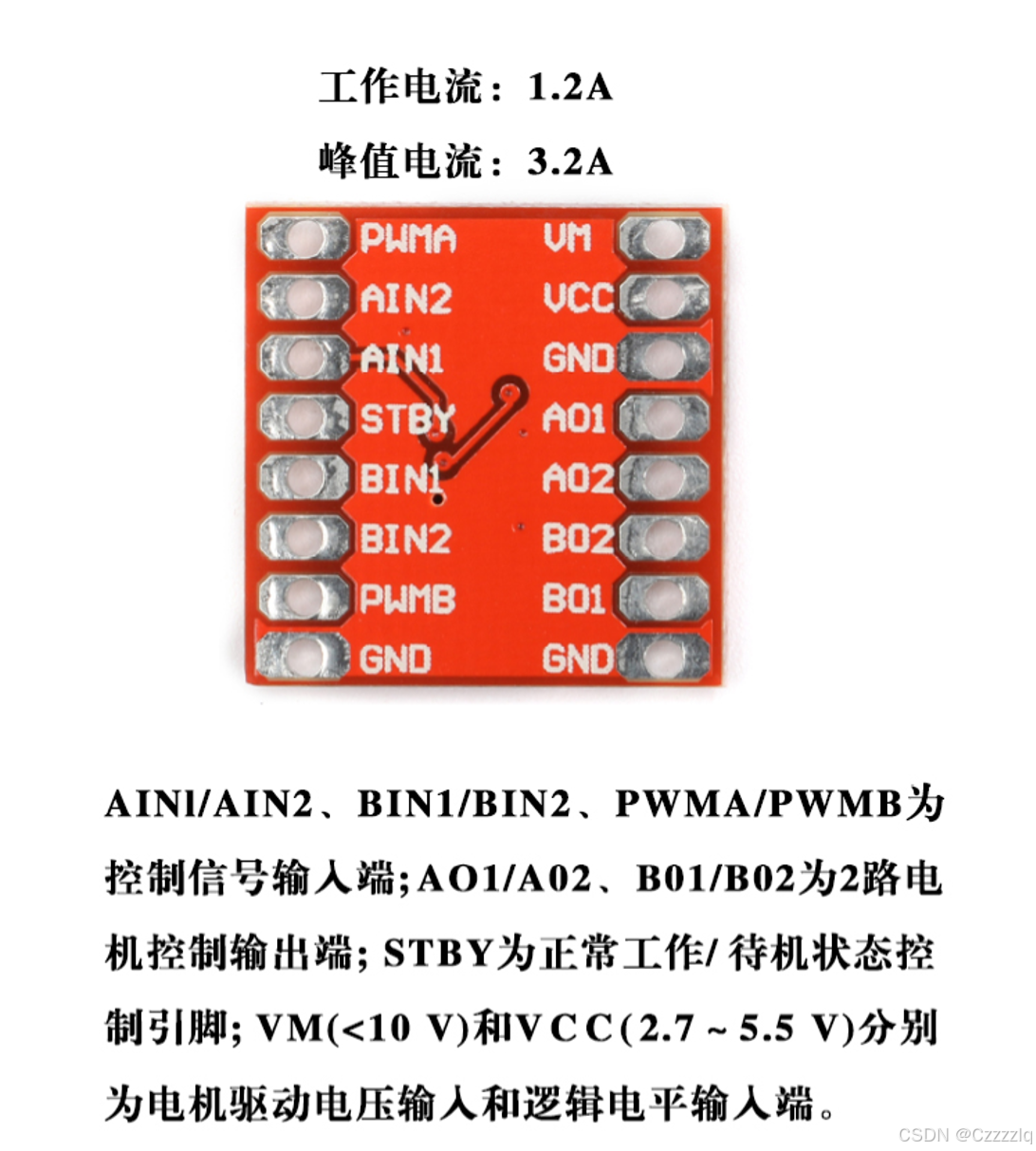
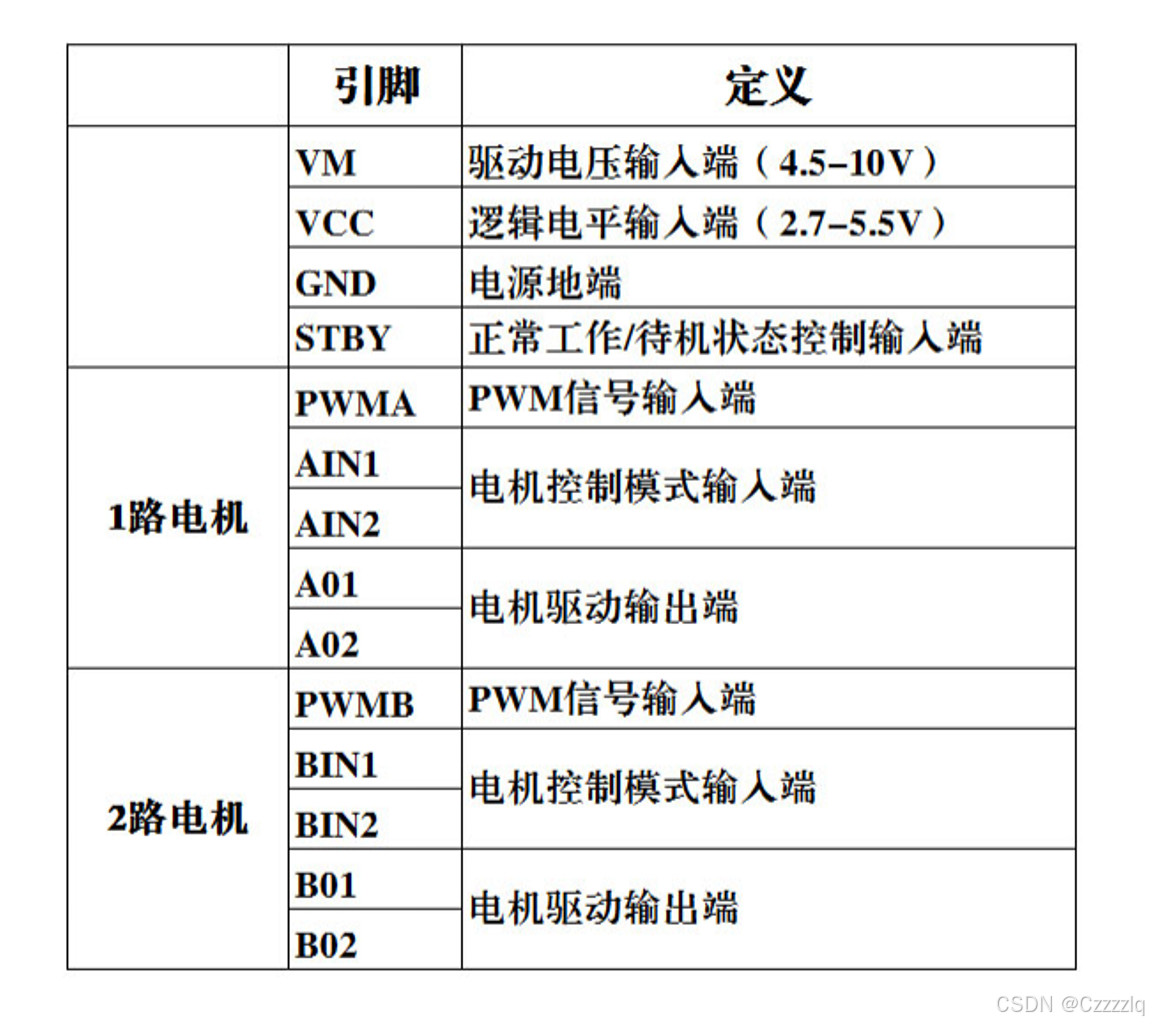
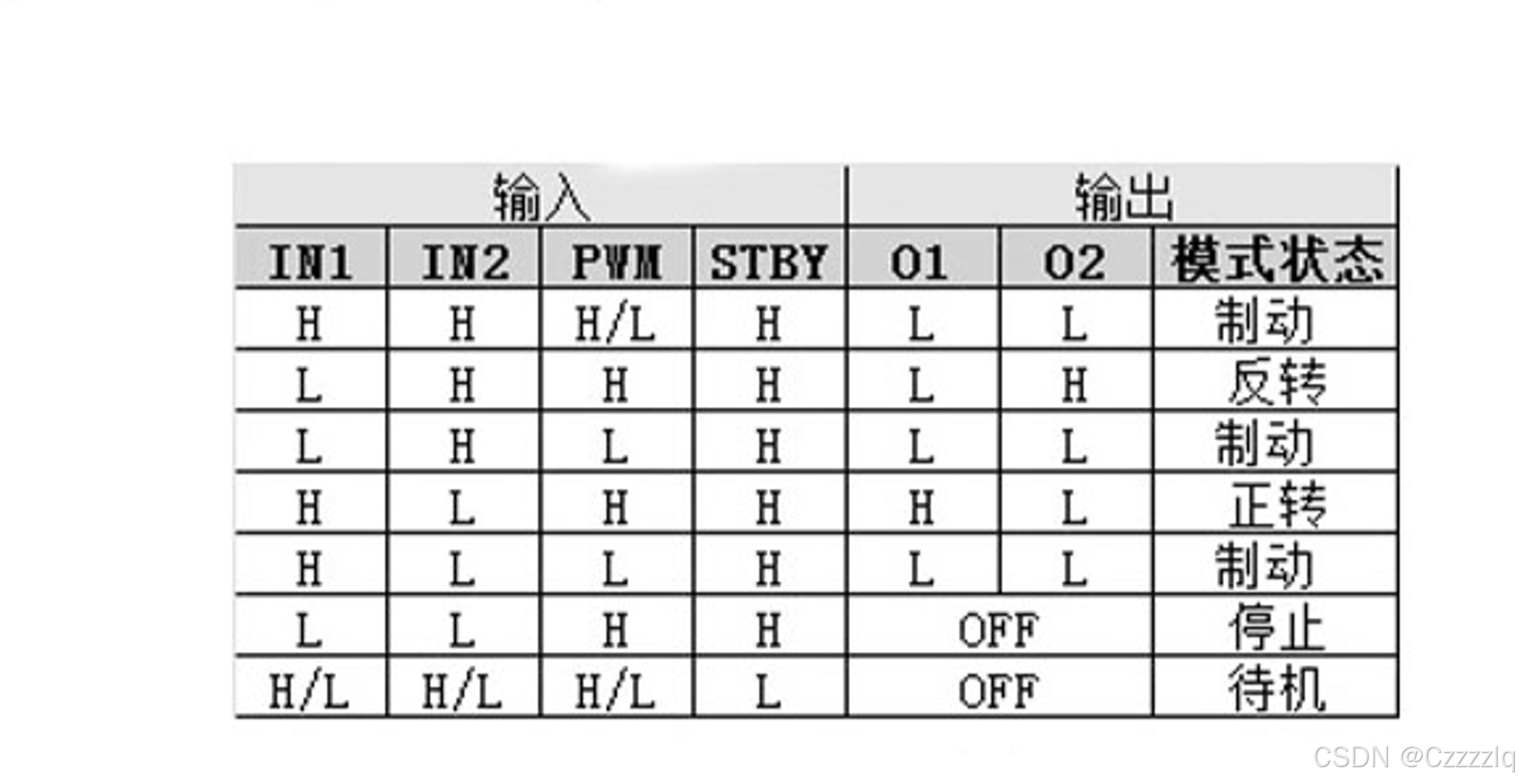
TB6612:由东芝(Toshiba)生产的双H桥直流电机驱动芯片,可同时驱动两个有刷直流电机,支持正转、反转、制动和停止四种模式,每通道持续输出电流达1.2A,峰值电流可达3.2A,适用于机器人、智能小车等需要高效驱动的场景。其逻辑控制电压为2.7V-5.5V,电机驱动电压范围为2.5V-12V,通过PWM信号调节电机转速,并具备方向控制引脚(AIN1/AIN2和BIN1/BIN2)切换电机转向;内置过热保护、过流保护和欠压锁定等安全机制,有效防止损坏;相比传统L298N模块,TB6612效率更高、体积更小,且无需外接散热片,适合紧凑型设计,是嵌入式电机控制的常用解决方案。
技术实现
原理图
TB6612
 接线图
接线图
代码实现
main.c
/**********************************************************
1.实验名称:PWM驱动直流电机
2.实验环境:STM32F103C8T6最小系统板
3.实验内容:通过TIM2调制PWM输出直流电机并且使用按键调整电机转速
4.作者;abai
5.实验时间:2025-3-24
**********************************************************/
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
#include "OLED.h"
#include "Motor.h"
#include "Key.h"
int8_t Speed; //直流电机速度控制变量
uint8_t KeyNum; //按键值
int main(void)
{
/*
OLED初始化
*/
OLED_Init(); //按键初始化
Motor_Init(); //直流电机初始化
Key_Init(); //按键初始化
OLED_ShowString(1,1,"Speed:");
while(1)
{
KeyNum = Key_GetNum();
/*
加快电机转速
*/
if(KeyNum == 1)
{
Speed += 20;
/*
电机反向旋转,转速不变
*/
if(Speed > 100)
{
Speed = -100;
}
}
Motor_SetSpeed(Speed);
OLED_ShowSignedNum(1,7,Speed,3);
}
}
PWM.h
#ifndef __PWM_H__
#define __PWM_H__
#include "stm32f10x.h" // Device header
void PWM_Init(void);
void PWM_SetCompare3 (uint16_t Compare);
#endif
PWM.c
#include "PWM.h"
/**
* @brief PWM初始化函数
* @param None
* @retval None
* @note 输出频率为1kHz,占空比为50%,分辨率为1%的PWM波形
**/
void PWM_Init(void)
{
/*
开启时钟
*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //开启TIM2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启GPIOA时钟
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //开启AFIO时钟
//
// /*
// 引脚重映射
// */
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //将TIM2的CH1从PA0重映射到PA15
// /*
// 解除引脚复用
// */
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //PA15引脚默认作为JTD1功能使用,此处解除AFIO的JTAG复用
/*
配置端口
*/
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2; //选择PA0 //重映射到GPIO_Pin_15
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出,将引脚的控制权交给片上外设
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*
选择TIM时钟
*/
TIM_InternalClockConfig(TIM2);
/*
配置时基单元
*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //定义一个TIM_TimeBaseInitTypeDef类型的结构体用于初始化时基单元
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频模式为不分
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数方式设置为向上计数模式
/*
输出的PWM波形的频率为1kHz,分辨率为1%
PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
*/
TIM_TimeBaseInitStruct.TIM_Period = 100-1; //ARR,自动加载重装寄存器,要写入自动重装值
TIM_TimeBaseInitStruct.TIM_Prescaler = 36-1; //PSC,预分频器的分频值
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数,只有高级定时器才会使用,通用定时器用不到
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct); //初始化时基单元
/*
初始化输出比较单元
*/
TIM_OCInitTypeDef TIM_OCInitStruct; //定义一个TIM_OCInitTypeDef类型的结构体用以输出比较单元初始化
TIM_OCStructInit(&TIM_OCInitStruct); //给每个结构体成员赋初始值,防止因未使用到的结构体成员未初始化而导致程序出现错误
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式1
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; //OC1有效电平为高电平
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; //输出比较使能
/*
输出PWM的波形占空比
PWM占空比: Duty = CCR / (ARR + 1)
*/
TIM_OCInitStruct.TIM_Pulse = 0; //CCR,捕获/比较器,本工程中有封装的函数用于改变占空比,此处先设置为0
TIM_OC3Init(TIM2,&TIM_OCInitStruct);
TIM_Cmd(TIM2,ENABLE); //启动TIM2
}
/**
* @brief 指定CCR寄存器的值改变PWM Duty
* @param None
* @retval None
* @note None
**/
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2,Compare);
}
Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Motor_Init(void);
void Motor_SetSpeed(int8_t Speed);
#endif
Motor.c
#include "Motor.h"
/**
* @brief 直流电机初始化
* @param None
* @retval None
* @note None
**/
void Motor_Init(void)
{
/*
初始化方向控制引脚
*/
/*
高速总线外围时钟设置
*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*
配置端口
*/
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5; //选择PA4和PA5引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*
PWM初始化
*/
PWM_Init();
}
/**
* @brief 直流电机速度设置
* @param None
* @retval None
* @note None
**/
void Motor_SetSpeed(int8_t Speed)
{
/*
正转
*/
if(Speed >= 0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
PWM_SetCompare3(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
PWM_SetCompare3(-Speed); //函数接受的参数为正值,Speed为负数时Speed前应该加负号
}
}
Key.h
#ifndef __KEY_H__
#define __KEY_H__
#include "stm32f10x.h" // Device header
#include "Delay.h"
void Key_Init(void);
uint8_t Key_GetNum(void);
#endif
Key.c
#include "Key.h"
/**
* @brief 设置高速总线APB2外围时钟
* 配置GPIO端口
* @param None
* @retval None
*/
void Key_Init(void)
{
/*
高速总线APB2外围时钟设置
*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
/*
配置端口
*/
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //选择上拉输入模式
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}
/**
* @brief 读取按键的值
* @param None
* @retval 按键的值
*/
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
if(!GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1))
{
Delay_ms(20);
while(!GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1));
Delay_ms(20);
KeyNum = 1;
}
if(!GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11))
{
Delay_ms(20);
while(!GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11));
Delay_ms(20);
KeyNum = 2;
}
return KeyNum;
}
OLED.h
#ifndef __OLED_H
#define __OLED_H
void OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
#endif
OLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x)) //可更改引脚配置
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x)) //更改引脚时,改变参数GPIOx,GPIO_Pin_x
/*引脚初始化*/
void OLED_I2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //将引脚的输出模式设置为开漏输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//更改引脚时,改变参数GPIOx,GPIO_Pin_x
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//更改引脚时,改变参数GPIOx,GPIO_Pin_x
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(!!(Byte & (0x80 >> i)));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
OLED_Font.H
#ifndef __OLED_FONT_H
#define __OLED_FONT_H
/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,
0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,
0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,
0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,
0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,
0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,
0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,
0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,
0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,
0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,
0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,
0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,
0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,
0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,
0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,
0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,
0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,
0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,
0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,
0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,
0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,
0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,
0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,
0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,
0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,
0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,
0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,
0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,
0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,
0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,
0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,
0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,
0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,
0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,
0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,
0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,
0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,
0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,
0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,
0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,
0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,
0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,
0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,
0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,
0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,
0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,
0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,
0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,
0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,
0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,
0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,
0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
#endif
内容要点
PWM基本结构

开启外设时钟
/*
开启时钟
*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //开启TIM2时钟本实验使用TIM2输出调制PWM波来驱动LED呼吸灯,TIM2属于APB1外设,调用RCC_APB1PeriphClockCmd()函数来开启APB1外设时钟。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //开启GPIOA时钟根据STM32引脚的定义,PA0的默认复用功能为TIM2的输出比较通道之一TIM2_CH1,GPIOA隶属于APB2外设,调用RCC_APB2PeriphClockCmd()函数开启APB2外设时钟。
配置GPIO端口
/*
配置端口
*/
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2; //选择PA2 //重映射到GPIO_Pin_15
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出,将引脚的控制权交给片上外设
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO初始化中,初始化GPIO_InitStruct结构体成员,将GPIO引脚设置为PA0 Pin,将GPIO模式设置为复用推挽输出,因为GPIO的主功能为PA0 IO口,这里使用其默认复用功能,故应将GPIO模式设置为复用推挽,使用普通的推挽输出无法输出PWM波形。

配置时基单元
/*
选择TIM时钟
*/
TIM_InternalClockConfig(TIM2);
选择TIM时钟为内部时钟
/*
配置时基单元
*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //定义一个TIM_TimeBaseInitTypeDef类型的结构体用于初始化时基单元
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频模式为不分
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数方式设置为向上计数模式
/*
输出的PWM波形的频率为1kHz,分辨率为1%
PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
*/
TIM_TimeBaseInitStruct.TIM_Period = 100-1; //ARR,自动加载重装寄存器,要写入自动重装值
TIM_TimeBaseInitStruct.TIM_Prescaler = 36-1; //PSC,预分频器的分频值
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数,只有高级定时器才会使用,通用定时器用不到
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct); //初始化时基单元将ARR的值设置为100,方便计算占空比,将PSC的值设置为36,使输出的PWM频率达20kHz,超出人耳能分辨的声音频率,减少对环境的噪音干扰。
PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
初始化输出比较单元
/*
初始化输出比较单元
*/
TIM_OCInitTypeDef TIM_OCInitStruct; //定义一个TIM_OCInitTypeDef类型的结构体用以输出比较单元初始化
TIM_OCStructInit(&TIM_OCInitStruct); //给每个结构体成员赋初始值,防止因未使用到的结构体成员未初始化而导致程序出现错误
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式1
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; //OC1有效电平为高电平
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; //输出比较使能
/*
输出PWM的波形占空比
PWM占空比: Duty = CCR / (ARR + 1)
*/
TIM_OCInitStruct.TIM_Pulse = 0; //CCR,捕获/比较器,本工程中有封装的函数用于改变占空比,此处先设置为0
TIM_OC1Init(TIM2,&TIM_OCInitStruct);初始化输出比较单元时,在初始化TIM输出比较结构体之前调用TIM_OCStructInit()函数给结构体的每个成员初始化赋默认值,防止在实验中未使用到输出比较单元中的某些功能且未初始化这些功能对应的结构体成员时,发生意外错误。
将输出比较单元的输出模式设置为PWM模式1。

设置输出极性为高电平有效,即PWM模式1下计数器的值小于CCR时为高电平,反之为低电平。
此处是通过设置捕获比较使能寄存器TIMx_CCER位1CC1P设置输入/捕获1输出极性

此处将CCR寄存器的值设置为0,实验中使用封装的函数 void PWM_SetComparel(uint16_t Compare)来调用TIM_SetCompare1()函数来改变CCR寄存器的值实现占空比的改变。
/**
* @brief 指定CCR寄存器的值改变PWM Duty
* @param None
* @retval None
* @note None
**/
void PWM_SetComparel(uint16_t Compare)
{
TIM_SetCompare1(TIM2,Compare);
}输出比较通道重映射
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //开启AFIO时钟
//
// /*
// 引脚重映射
// */
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //将TIM2的CH1从PA0重映射到PA15
// /*
// 解除引脚复用
// */
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //PA15引脚作为JTD1功能使用,此处解除AFIO的JTAG复用在开启TIM2和GPIOA时钟后,开启AFIO时钟,调用GPIO_PinRemapConfig()将TIM2_CH1从PA0引脚重映射到PA15引脚。由于PA15默认为JTAG调试功能,调用GPIO_PinRemapConfig()函数解除引脚复用,PA15引脚作为JTD1功能使用,解除AFIO的JTAG复用。(如果不使用重映射功能,则忽略这部分)
直流电机初始化
/**
* @brief 直流电机初始化
* @param None
* @retval None
* @note None
**/
void Motor_Init(void)
{
/*
初始化方向控制引脚
*/
/*
高速总线外围时钟设置
*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/*
配置端口
*/
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5; //选择PA4和PA5引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/*
PWM初始化
*/
PWM_Init();
}将PA4和PA5引脚设置为输出引脚,选用推挽输出模式。两个引脚分别连接TB6612的AIN1和AIN2引脚,用于输出电压差,驱动电机正反转。
直流电机设置
/**
* @brief 直流电机设置
* @param None
* @retval None
* @note 设置直流电机的转速和转动方向
**/
void Motor_SetSpeed(int8_t Speed)
{
/*
正转
*/
if(Speed >= 0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
PWM_SetCompare3(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
PWM_SetCompare3(-Speed); //函数接受的参数为正值,Speed为负数时Speed前应该加负号
}
}电机转速Speed的正负代表电机转动的方向,绝对值的大小代表电机转速大小。PA4和PA5引脚输出不同的高低电平输出电压差使电机转动。
实验结果
按下按键,电机开始转动,OLED上显示当前的转速及转动方向。再次按下按键,电机转速增加,转速到达100为转速的最大值。再次按下按键,电机以最大转速反向旋转。再次按下按键,电机转速减小,直至为0。
直流电机
问题记录
暂无

















 522
522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









