






首先,确保你已经安装好了ROS,如果没有,可以参考鱼香ROS一键安装,接下来就是ORB SLAM3 安装,可以参考纯小白Ubuntu20.04系统从零运行ORBSLAM3_orb-slam在ubantu20.04上配置-CSDN博客
ORB SLAM3 在ROS下跑数据集,可以参考Ubuntu20.04在ROS下运行ORB-SLAM3_ros运行orbslam3-CSDN博客
之后,安装astra 相机驱动。可以参考
ubutun20.04安装奥比中光Astra过程中遇到的问题及解决方案。以及安装步骤_奥比中光驱动安装-CSDN博客
在完成以上步骤后,就可以配置自己的相机在ORB SLAM3 的ROS环境下运行了。
首先
roscore
接下来,在包含astra相机的驱动包下执行:
source devel/setup.bash
roslaunch astra_camera astra.launch 结果如图
接下来,在开一个终端,就是执行:
rostopic list然后你可以看到,你的相机到所有的订阅话题:
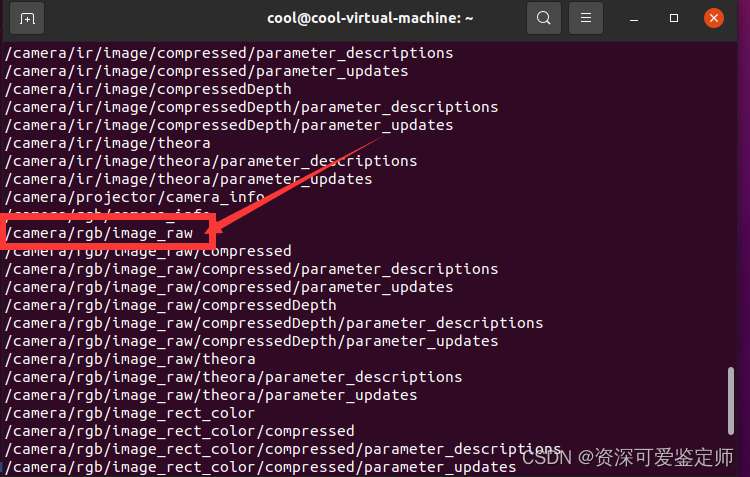
可以先选择,标注那个,复制路径,这个就是就是摄像头的话题
接下来,在/home/cool/SLAM3/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src路径下(根据自己的路径)修改代码:
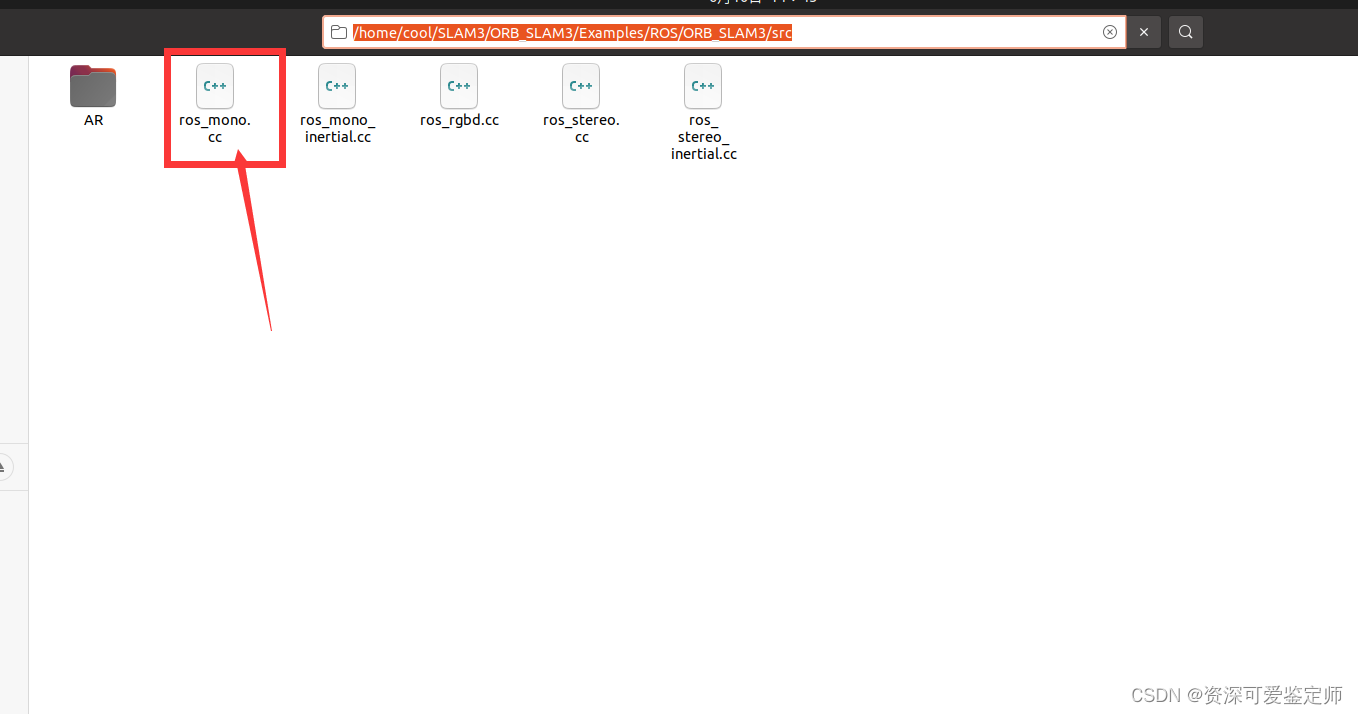
打开后,键盘输入O进行插入编辑,找到
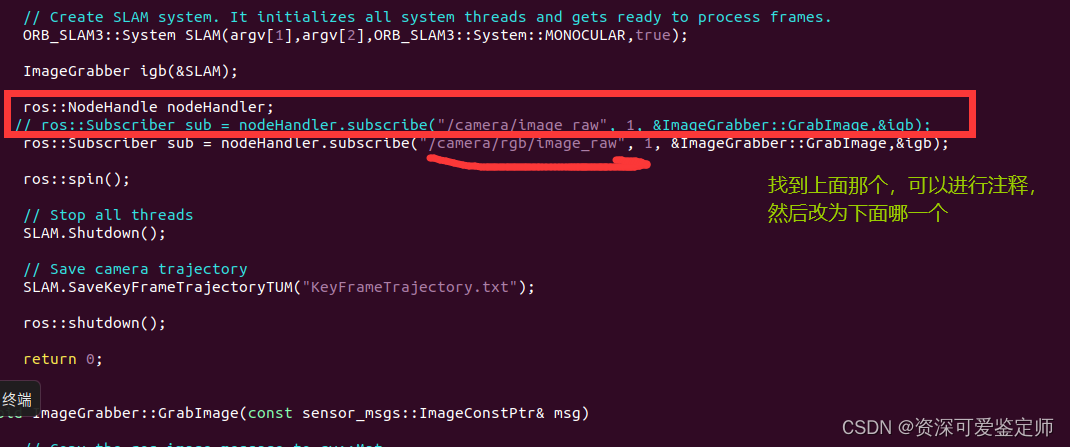
编辑完成后,按下键盘的ESC按钮退出编辑,然后输入冒号:,小写字母wq.即:wq
退出保存。
回到ORB_SLAM3主目录再次运行:
./build_ros.sh
把刚刚修改的代码进行编译
最后在ORB_SLAM3下开一个终端运行:
rosrun ORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples/Stereo-Inertial/EuRoC.yaml
(或者)rosrun ORB_SLAM3 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM3/Asus.yaml
运行效果如图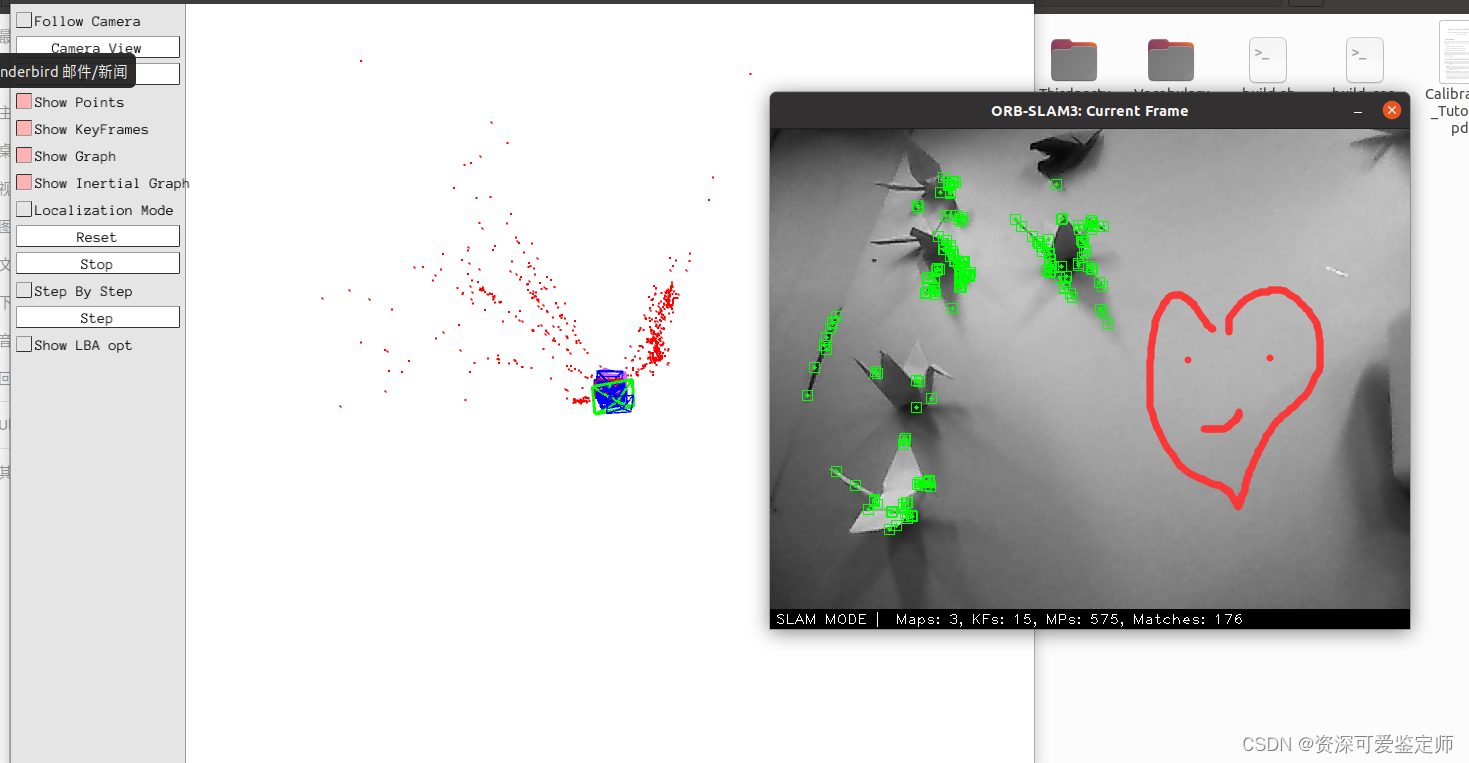
本人目前研究多机器人方向,有相关研究方向的欢迎交流讨论。

有志同道合的朋友可以加+V,一起聊聊。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









