






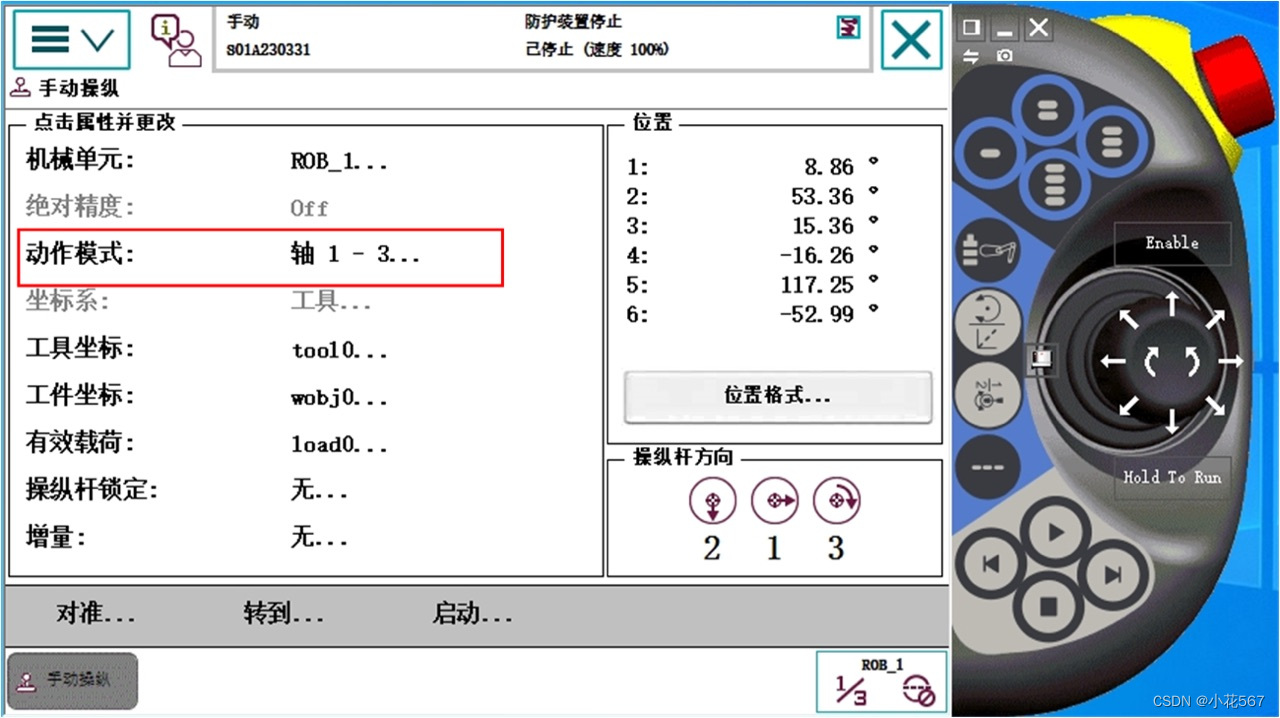
单轴运动 用于控制机器人的各轴单独运动 方便调节机器人的位置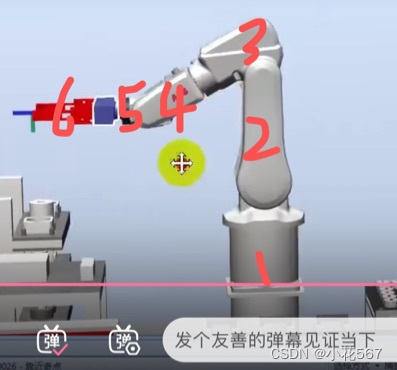
1-3轴控制123
3-4轴控制456
线性模式
线性运动控制机器人在对应坐标系 空间中进行极限运动后便于操作者定位(坐标系还没有学会补上的)
重定位
重定位是选定的机器人的工具TCP绕着对应的工具坐标系进行旋转运动运动时TCP不动姿态发生变化用于对机器人姿态进行调整
单轴运动 用于控制机器人的各轴单独运动 方便调节机器人的位置
1-3轴控制123
3-4轴控制456
线性模式
线性运动控制机器人在对应坐标系 空间中进行极限运动后便于操作者定位(坐标系还没有学会补上的)
重定位
重定位是选定的机器人的工具TCP绕着对应的工具坐标系进行旋转运动运动时TCP不动姿态发生变化用于对机器人姿态进行调整

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























