






一、GPIO各常用相关函数复习
1.void GPIO_DeInit (GPIO_TypeDef* GPIOx)
函数解释:gpio的反初始化函数,该函数的作用是把GPIO相关的寄存器配置成上电复位后的默认状态,在第一次初始化前或者不在使用某一接口后,可以调用该函数。
参数:GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
2.void GPIO_Init (GPIO_TypeDef* GPIOx,GPIO_InitTypeDef* GPIO_InitStruct)
函数解释:GPIO的初始化函数,该函数的作用是对io进行初始化。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2)GPIO_InitStruct,GPIO的初始化相关结构体。该结构体里的成员变量决定了我们具体的初始化参数。以下进行说明:
GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
GPIO_Mode:指定GPIO的模式,有四种模式:
GPIO_Mode_IN(输入), GPIO_Mode_OUT(输出), GPIO_Mode_AF(第二功能), GPIO_Mode_AN(模拟)
GPIO_Speed:指定IO最快翻转速度,也就是当使用IO产生频率(如PWM)的最大速度。有四种模式:
GPIO_Low_Speed(低速), GPIO_Medium_Speed(中等速度), GPIO_Fast_Speed(快速), GPIO_High_Speed(低速)
GPIO_OType:指定选择管脚的输出类型,有以下两种配置:
GPIO_OType_PP(推挽方式输出),GPIO_OType_OD(开漏方式输出)
温馨提示:
推挽输出:推挽输出就是单片机引脚可以直接输出高电平电压。低电平时接地,高电平时输出单片机电源电压。这种方式可以不接上拉电阻。但如果输出端可能会接地的话,这个时候输出高电平可能引发单片机运行不稳定,甚至可能烧坏引脚。推挽方式的驱动力更大。
开漏输出:开漏输出就是不输出电压,低电平时接地,高电平时不接地。如果外接上拉电阻,则在输出高电平时,电压会拉到上拉电阻的电源电压。这种方式适合在连接的外设电压比单片机低的时候。
GPIO_PuPd:指定选择管脚的上拉和下拉模式。有三种配置:
GPIO_PuPd_NOPULL(不上拉也不下拉),GPIO_PuPd_UP(上拉),GPIO_PuPd_DOWN(下拉)
温馨提示:
这些都是io内部的内部上拉或者下拉模式,也可以接上拉或下拉电阻,通过硬件连接,实现外部上拉或外部下拉。
3.void GPIO_StructInit (GPIO_InitTypeDef* GPIO_InitStruct)
函数解释:GPIO结构体的初始化。对GPIO_InitStruct结构体进行默认配置。
参数:GPIO_InitStruct,直接传入该结构体的指针。在该函数内会对结构体进行初始化。
4.void GPIO_PinLockConfig (GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
函数解释:锁定GPIO寄存器,锁定的寄存器是GPIOx_MODER, GPIOx_OTYPER, GPIOx_OSPEEDR, GPIOx_PUPDR, GPIOx_AFRL and GPIOx_AFRH。在下一次复位前,被锁定的管脚不能被修改。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2) GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
GPIO的读写函数
1.uint8_t GPIO_ReadInputDataBit (GPIO_TypeDef* GPIOx , uint16_t GPIO_Pin)
函数解释:读取io输入管脚的值
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2) GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
返回值:输入管脚的值 Bit_SET(高电平),Bit_RESET(低电平)
2.uint16_t GPIO_ReadInputData (GPIO_TypeDef* GPIOx )
函数解释:读取输入io数据,该函数用于读取一个io分组的所有数据
参数:GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
返回值:一个io端口的所有数据(输入状态)
3.uint8_t GPIO_ReadOutputDataBit (GPIO_TypeDef* GPIOx , uint16_t GPIO_Pin)
函数解释:读取io输出管脚的值
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2) GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
返回值:输出管脚的值 Bit_SET(高电平),Bit_RESET(低电平)
4.uint16_t GPIO_ReadOutputData (GPIO_TypeDef* GPIOx )
函数解释:读取输出io数据,该函数用于读取一个io分组的所有数据
参数:GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
返回值:一个io端口的所有数据(输出状态)
5.void GPIO_SetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
函数解释:对io管脚进行置位(输出高电平)。这个函数使用GPIOx_BSRR寄存器来实现原子读或者修改操作。在这种情况下,在读和修改访问时发生一个IRQ中断是没有危险的。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2) GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
6.void GPIO_ResetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
函数解释:对io管脚进行复位(输出低电平)。这个函数使用GPIOx_BSRR寄存器来实现原子读或者修改操作。在这种情况下,在读和修改访问时发生一个IRQ中断是没有危险的。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2) GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
7.void GPIO_WriteBit(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin,BitActionBitVal)
函数解释:对某一位进行写入操作。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2)GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
(3)BitVal:写入高电平或者低电平(Bit_RESET:写入低电平 Bit_SET:写入高电平)
8.void GPIO_Write(GPIO_TypeDef* GPIOx,uint16_t PortVal)
函数解释:对GPIO端口进行写入操作,适用于对统一端口的多个管脚的写入。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2)BitVal:写入高电平或者低电平(Bit_RESET:写入低电平 Bit_SET:写入高电平)
9.void GPIO_ToggleBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
函数解释:翻转指定的GPIO口,如果当前io是高电平,则变为低电平。如果当前io是低电平,则变为高电平。
参数:(1)GPIOx,GPIO的分组,如 GPIOA,GPIOB,GPIOC等的宏定义。
(2)GPIO_Pin:指定具体的io脚,如GPIO_Pin_0,GPIO_Pin_1这样的宏定义。
以上出自一位优秀的博主,下面是原文链接:https://blog.csdn.net/niuyuce/article/details/84846768
二、位带操作控制GPIO输入输出
sbit KEY1=P3^1;
sbit KEY2=P3^0;
sbit KEY3=P3^2;
sbit KEY4=P3^3;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
sbit bee=P2^5;
sbit led=P2^6;
sbit KEY_S5=P3^4;

#define GPIOB_ODR_Addr (GPIOB_BASE+0X0C)
#define PBout(n) * (unsigned int*)((GPIOB_ODR_Addr & 0xF0000000)+0x02000000+((GPIOB_ODR_Addr &0x00FFFF)<<5)+(n<<2))
void Delay(uint32_t count)
{
for(;count!=0;count--);
}
int main(void)
{
/* LED端口初始化 */
LED_GPIO_Config();
LED1_ON;
/* 按键端口初始化 */
Key_GPIO_Config();
while(1)
{
PBout(0) = 1;
Delay(0xFFFFF);
PBout(0) = 0;
Delay(0xFFFFF);
}
}这一代码通过位带操作的方法间接控制GPIOB的输出,从而控制LED灯的亮灭。
三、时钟配置
时钟是单片机的心脏。
首先呢,是HSE : High Speed External Clock signal ,即高速的外部时钟。
来源:无源晶振( 4-16M ),通常使用8M。(也可以来源于有源晶振。当使用有源晶振时,时钟从 OSC_IN 引脚进入,OSC_OUT 引脚悬空,当选用无源晶振时,时钟从 OSC_IN 和 OSC_OUT 进入,并且要配谐振电容。)
控制: RCC _CR时钟控制寄存器的位16 : HSEON控制
相对来说,HSE精度比较高,而LSE精度比较小。
在这里让寄存器HSEON置1为启动。
32中总共有五个时钟源, 除去刚刚提到的HSE高速外部时钟外,还有:
②HSI是高速内部时钟,RC振荡器,频率为8MHz。
③LSI是低速内部时钟,RC振荡器,频率为40kHz。
④LSE是低速外部时钟,接频率为32.768kHz的石英晶体。
⑤PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。
PLL时钟源的其中一个寄存器XTPRE的作用就是控制HSE不分频或2分频。
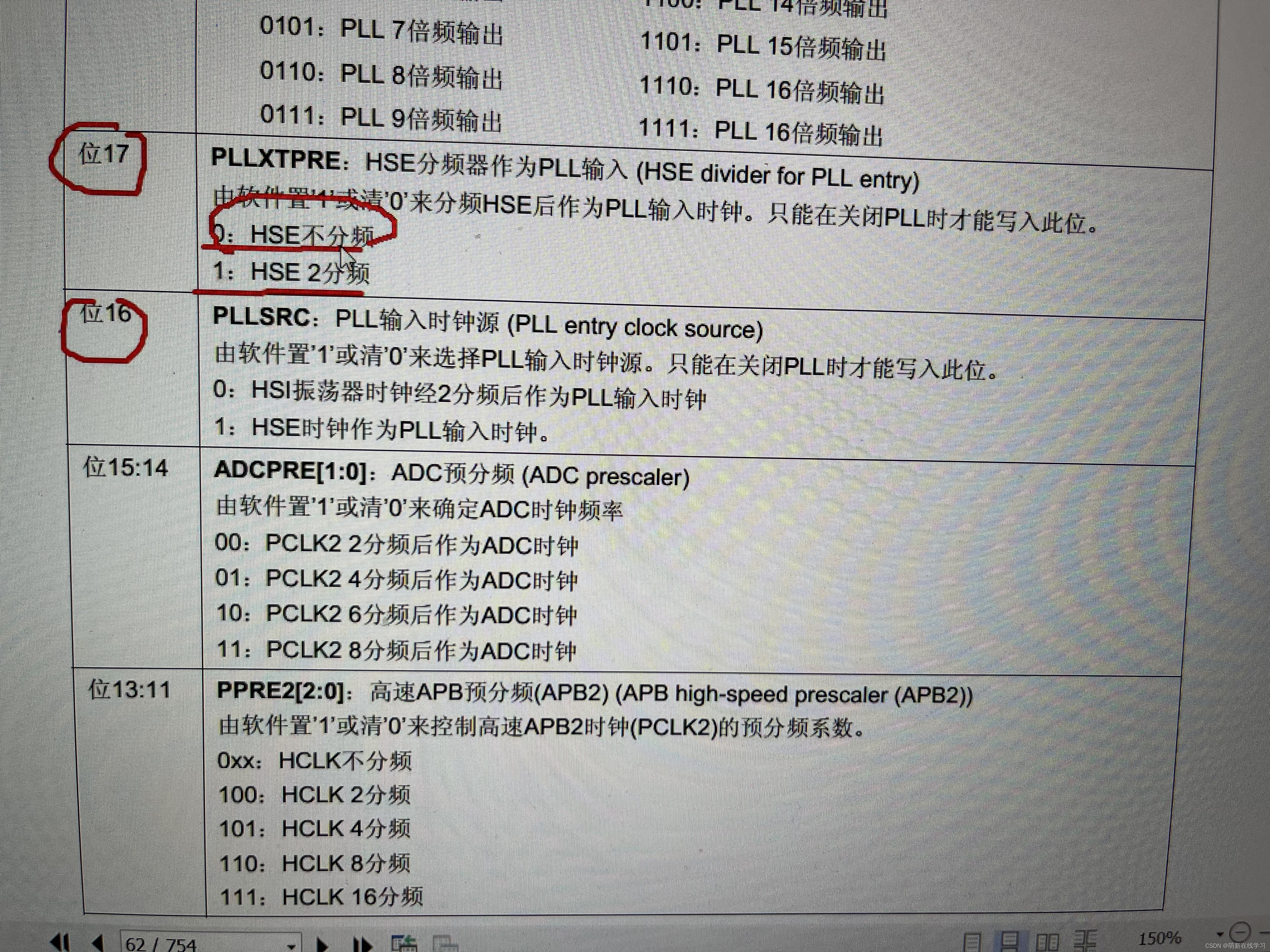
我们一般如何配置呢?一般都是将XTPRE配置为0,将SRC配置为1;
在时钟配置这里啊,来简单说一下为什么我们一般都使用HSE而不是HSI,
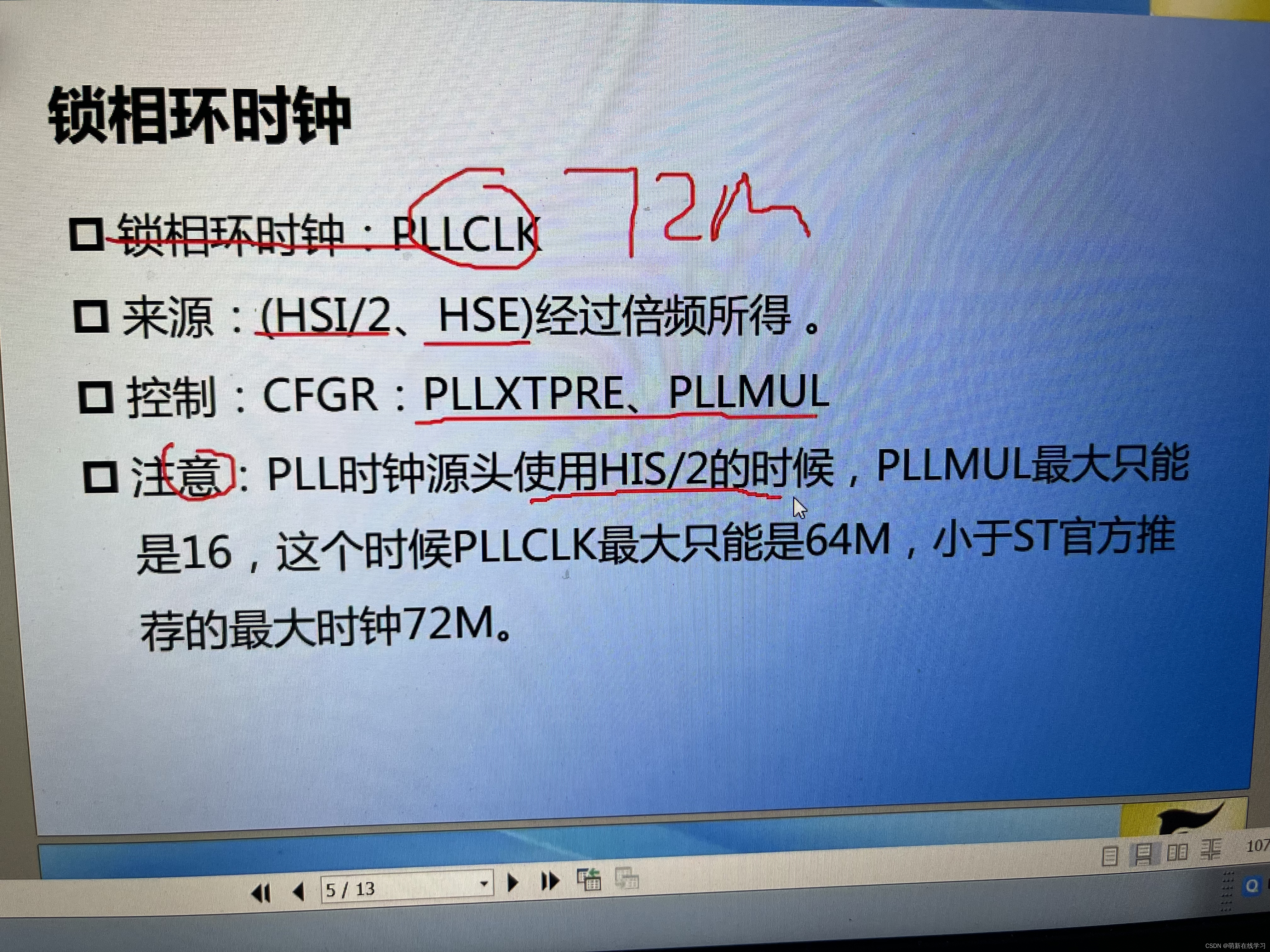
看这里的“注意”这一部分,官方推荐的时钟频率是72M,这也是最稳定的一个比较大的频率,而如果使用HSI的话,很明显是达不到要求的。
来看一下下面的这个流程,首先呢,HSE发出的信号不分频,也就是经过PLLXTPRE上面的这一条线,再经过PLLSRC后可以向上走进入内部,也可以拐弯进入下一个“PLLMUL”,我们关闭上面的分路,进入PLLMUL,在这里控制进行分频,选择9倍频,就配置成了72M(因为前面发出的是8M),然后进入后面的CLK,在这里我们可以看到,有三条线连着SW,分别是HSE、HSI、PLLCLK,说明SW的来源可以是这三个任意。
在这一流程中的SRC、MUL、SW都是由PLLCFGR这一寄存器控制的。

另外就是,SW,这一个位,是一个“系统时钟切换位”,如下图所示:

可以通过配置SW而强制转换所使用的系统时钟。
接着上文的分析,

从SW出来,经过SYSCLK后,就是我们第一条总线AHB的预分频器,这一预分频器连接着另外两条总线的预分频器,而在两条总线的预分频器后连接着很多外设。

下面开始讲总线的配置,总线的配置需要用到的也是PLLCFGR这一寄存器,AHB总线需要用到HPRE这一位,一般配置为1,APB1用到的是PPRE1这一位,一般配置为2,也就是36M,APB2用到的是PPRE2这一位,配置一般为1,因为是高速嘛。
下面是时钟树上比较重要的几个时钟:




其中这个RTC,是芯片内部的一个独立时钟,一般用来进行实时时钟工程时需要用到,可以独立运行时间。
















 3403
3403

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









