






初始化定时器20ms:TIM3_Int_Init(200-1,7200-1);
4.1.2 按键:
原理图:使用PA0引脚
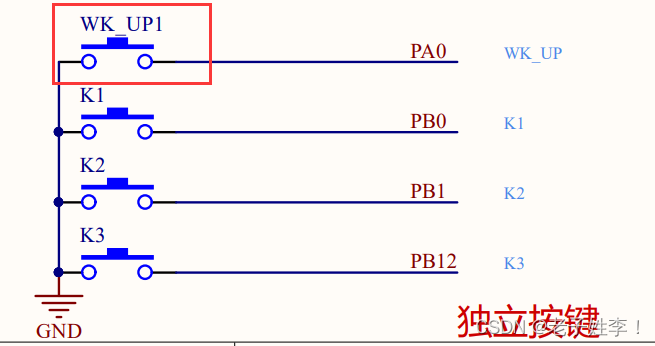
注意:这里按键按下接地,故配置为上拉输入。
代码:
//按键初始化函数,配置IO口
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能PORTA,PORTB时钟
//初始化 WK_UP–>GPIOA.0
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
}
4.1.3 串口打印*
这部分可用不用,我这里是为了方便查看实验结果。
不使用的话,读者可配置自己的验证方式。(后文的printf相关的注释即可)
参考代码:
#include “sys.h”
#include “usart.h”
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include “includes.h” //ucos 使用
#endif
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
4.2 类型、变量定义
4.2.1按键事件
枚举型名称:KEY_EventList_TypeDef
本文实现短按长按功能,故只有三种事件:无事件、短按事件、长按事件
对应代码,即:空闲、单击、长按
typedef enum _KEY_EventList_TypeDef
{
KEY_Event_Null = 0x00, // 空闲
KEY_Event_SingleClick = 0x01, // 单击
KEY_Event_LongPress = 0x02 // 长按
}KEY_EventList_TypeDef;
4.2.2 按键电平、动作
因为有的电路按下时,引脚为低电平;有的按下时,引脚却为高电平。这里将电平、动作分开,更方便移植。
枚举型名称:KEY_PinLevel_TypeDef
即:高、低电平。
// 按键引脚的电平
typedef enum
{
KKEY_PinLevel_Low = 0,
KEY_PinLevel_High
}KEY_PinLevel_TypeDef;
枚举型名称:KEY_Action_TypeDef
按键只有按下和没按下俩个动作:
即:按下、释放
// 按键动作,
typedef enum
{
KEY_Action_Press = 0,
KEY_Action_Release
}KEY_Action_TypeDef;
4.2.3 按键状态
枚举型名称:KEY_StatusList_TypeDef
思路图解的分析,分为如下几个状态。
即:空闲、消抖、确认按下、确认长按
// 按键状态
typedef enum _KEY_StatusList_TypeDef
{
KEY_Status_Idle = 0, // 空闲
KEY_Status_Debounce , // 消抖
KEY_Status_ConfirmPress , // 确认按下
KEY_Status_ConfirmPressLong, // 确认长按
}KEY_StatusList_TypeDef;
4.2.4 按键配置结构体
按键配置信息的结构体名称:KEY_Configure_TypeDef
打包好按键的基本属性。
typedef struct _KEY_Configure_TypeDef
{
uint16_t KEY_Count; // 按键长按时长计数
KEY_Action_TypeDef KEY_Action; // 按键动作,按下或释放
KEY_StatusList_TypeDef KEY_Status; // 按键状态
KEY_EventList_TypeDef KEY_Event; // 按键事件
KEY_PinLevel_TypeDef (*KEY_ReadPin_Fcn)(void); // 读引脚电平函数
}KEY_Configure_TypeDef;
成员解释:
- KEY_Count:计数,记一个数为20ms。
- KEY_Action:按键动作,按下或者释放。
- KEY_Status:记录按键的状态值。
- KEY_Event:记录按键触发的事件。
- KEY_ReadPin_Fcn:读取按键电平值的函数指针。方便移植。
4.3 变量、函数、宏定义
4.3.1宏定义
- KEY_LONG_PRESS_TIME :
短按、长按的时长分界线。大于–>长按,小于–>短按。 - KEY_PRESSED_LEVEL:
按键被按下的实际电平,我的电路里,按键按下引脚接地。所以为低电平。
/****************************************************************************************************
* 长按、单击 定义
* 长按事件:按下时间大于 KEY_LONG_PRESS_TIME,释放后响应。(不支持连按,需要连按响应可自己配置)
* 单击事件:按下时间小于 KEY_LONG_PRESS_TIME 释放后响应。
****************************************************************************************************/
// 长按时长的宏定义
#define KEY_LONG_PRESS_TIME 50 // 20ms*50 = 1s
#define KEY_PRESSED_LEVEL 0 // 按键被按下时的电平
4.3.2 变量定义
KeyCfg:全局变量,打包了按键的各个属性。
/****************************************************************************************************
* 按键配置信息的全局结构体变量
****************************************************************************************************/
KEY_Configure_TypeDef KeyCfg={
0, // 按键长按时长计数
KEY_Action_Release, // 按键动作,按下或释放
KEY_Status_Idle, // 按键状态
KEY_Event_Null, // 按键事件
KEY_ReadPin // 读引脚电平函数
};
4.3.3函数定义
局部函数:
//读取引脚的电平
static KEY_Action_TypeDef KEY_ReadPin(void)
{
return (KEY_Action_TypeDef)GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0);
}
// 获取按键动作,按下或释放,保存到结构体
static void KEY_GetAction(void)
{
if(KeyCfg.KEY_ReadPin_Fcn() == KEY_PRESSED_LEVEL)
{
KeyCfg.KEY_Action = KEY_Action_Press;
}
else
{
KeyCfg.KEY_Action = KEY_Action_Release;
}
}
KEY_ReadPin:读取PA_0的电平状态。
KEY_GetAction:将读取到的电平状态转换为实际的按下或释放的动作。
状态处理函数
KEY_ReadStateMachine:编写,思路完全按照前文手绘的思路图像
首先读取按键的动作,再在switch case 里面匹配引脚的状态,case下用if判断按键动作或按下的时长,对状态、事件进行赋值。
void KEY_ReadStateMachine(void)
{
KEY_GetAction();
switch(KeyCfg.KEY_Status)
{
//状态:没有按键按下
case KEY_Status_Idle:
if(KeyCfg.KEY_Action == KEY_Action_Press)
{
KeyCfg.KEY_Status = KEY_Status_Debounce;
KeyCfg.KEY_Event = KEY_Event_Null;
}
else
{
KeyCfg.KEY_Status = KEY_Status_Idle;
KeyCfg.KEY_Event = KEY_Event_Null;
}
break;
//状态:消抖
case KEY_Status_Debounce:
if(KeyCfg.KEY_Action == KEY_Action_Press)
{
KeyCfg.KEY_Status = KEY_Status_ConfirmPress;
KeyCfg.KEY_Event = KEY_Event_Null;
}
else
{
KeyCfg.KEY_Status = KEY_Status_Idle;
KeyCfg.KEY_Event = KEY_Event_Null;
}
break;
//状态:确认按下
case KEY_Status_ConfirmPress:
if( (KeyCfg.KEY_Action == KEY_Action_Press) && ( KeyCfg.KEY_Count >= KEY_LONG_PRESS_TIME))
{
printf(“KEY_Status_ConfirmPressLong\r\n”);
KeyCfg.KEY_Count = 0;
KeyCfg.KEY_Status = KEY_Status_ConfirmPressLong;
KeyCfg.KEY_Event = KEY_Event_Null;
}
else if( (KeyCfg.KEY_Action == KEY_Action_Press) && (KeyCfg.KEY_Count < KEY_LONG_PRESS_TIME))
{
printf(“继续按下 %d\r\n”,KeyCfg.KEY_Count);
KeyCfg.KEY_Count++;
KeyCfg.KEY_Status = KEY_Status_ConfirmPress;
KeyCfg.KEY_Event = KEY_Event_Null;
}
else
{
printf(“突然gg,按短了 %d\r\n”,KeyCfg.KEY_Count);
KeyCfg.KEY_Count = 0;
KeyCfg.KEY_Status = KEY_Status_Idle;
KeyCfg.KEY_Event = KEY_Event_SingleClick;
}
break;
//状态:确认长按
case KEY_Status_ConfirmPressLong:
printf(“KEY_Status_ConfirmPressLong\r\n”);
if(KeyCfg.KEY_Action == KEY_Action_Press)
{ // 一直等待其放开
printf(“一直按着 KEY_Status_ConfirmPressLong\r\n”);
KeyCfg.KEY_Status = KEY_Status_ConfirmPressLong;
KeyCfg.KEY_Event = KEY_Event_Null;
KeyCfg.KEY_Count = 0;
}
else
{
KeyCfg.KEY_Status = KEY_Status_Idle;
KeyCfg.KEY_Event = KEY_Event_LongPress;
KeyCfg.KEY_Count = 0;
}
break;
default:
break;
}
}
后记:
这里面的printf用于打印查看。
为了读起来轻松些(对称美bushi),多写了一些没必要的赋值操作。实际应用时可以注释掉,以提高效率。
4.4 开源
复制粘贴这些代码就可以跑起来的,若仍想看Keil工程文件,这里提供了下载方式。
参考工程代码下载
获取方式
1.打包下载。积分够的用户支持一下。
2.GitHub仓库:https://github.com/nanshoui163/KeyStateMachine.git
5.实验验证
5.1定时器中断:
直接调用KEY_ReadStateMachine()函数即可,将读取到的事件保存到KeyCfg.KEY_Event变量。
extern KEY_Configure_TypeDef KeyCfg;
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志
KEY_ReadStateMachine(); //调用状态机
if(KeyCfg.KEY_Event == KEY_Event_SingleClick)
{
printf(“单击\r\n”);//事件处理
}
if(KeyCfg.KEY_Event == KEY_Event_LongPress)
{
printf(“长按\r\n”);//事件处理
}
}
}
5.2 main函数
这里main函数十分简洁。初始化即可。
实际应用时,事件处理的代码不建议放在定时器里面。
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(115200); // 用于查看输出
TIM3_Int_Init(200-1,7200-1); //调用定时器使得20ms产生一个中断
//按键初始化函数
KEY_Init();
while(1);
}
5.3 结果验证
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Go语言工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Go语言全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Golang知识点,真正体系化!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以添加V获取:vip1024b (备注Go)

一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
友,同时减轻大家的负担。**
[外链图片转存中…(img-vKeiBQO4-1712928764428)]
[外链图片转存中…(img-NR4XjIUz-1712928764429)]
[外链图片转存中…(img-Kv4BIl5O-1712928764429)]
[外链图片转存中…(img-wPbg9uNE-1712928764430)]
[外链图片转存中…(img-8bdGaPNX-1712928764430)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Golang知识点,真正体系化!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以添加V获取:vip1024b (备注Go)
[外链图片转存中…(img-1LdcWesw-1712928764431)]
一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 6352
6352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









