






以下是六个三角函数(正弦、余弦、正切、余切、正割、余割)之间的核心关系总结,涵盖基本恒等式、倒数关系、平方关系和互余角关系:
一、基本定义关系
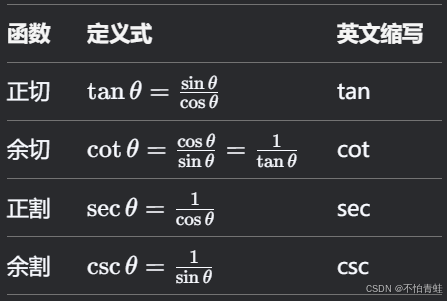
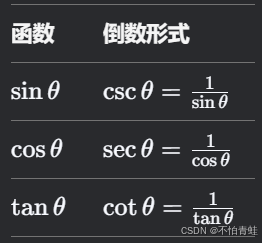
二、倒数关系
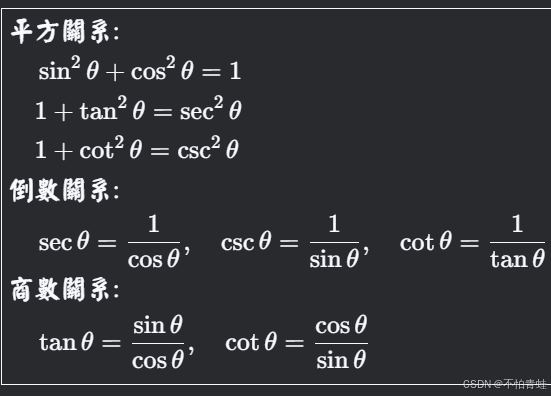
三、平方恒等式
-
基本平方和:
sin2θ+cos2θ=1sin2θ+cos2θ=1 -
正切与正割:
1+tan2θ=sec2θ(两边同乘cos2θ)1+tan2θ=sec2θ(两边同乘cos2θ) -
余切与余割:
1+cot2θ=csc2θ(两边同乘sin2θ)1+cot2θ=csc2θ(两边同乘sin2θ)
四、互余角关系
当 α+β=π2α+β=2π(互余)时:
sinα=cosβ,cosα=sinβtanα=cotβ,cotα=tanβsecα=cscβ,cscα=secβsinαtanαsecα=cosβ,cosα=sinβ=cotβ,cotα=tanβ=cscβ,cscα=secβ
简记:互余角的函数互换(sin ↔ cos,tan ↔ cot,sec ↔ csc)。
五、用单一函数表示其他函数
假设已知 sinθ=xsinθ=x,则其他函数可表示为:
cosθ=±1−x2tanθ=x±1−x2cotθ=±1−x2xsecθ=1±1−x2cscθ=1xcosθtanθcotθsecθcscθ=±1−x2=±1−x2x=x±1−x2=±1−x21=x1
注意:符号由 θθ 所在象限决定。
六、几何意义(单位圆)
在单位圆中,点 P(x,y)P(x,y) 对应角 θθ:
x=cosθ,y=sinθ斜率=tanθ=yx到x轴距离=secθ=1x到y轴距离=cscθ=1yx斜率到x轴距离到y轴距离=cosθ,y=sinθ=tanθ=xy=secθ=x1=cscθ=y1
七、常见应用场景
-
化简表达式:将复杂表达式转换为单一函数形式(如仅用 sinθsinθ 表示)。
-
证明恒等式:通过平方恒等式或倒数关系逐步推导。
-
解三角方程:利用关系式统一变量后求解。
八、避坑指南
-
象限符号:平方根前的正负号需根据角所在象限确定。
-
分母为零:当 θ=π2+kπθ=2π+kπ 时,tanθtanθ 和 secθsecθ 无定义。
-
互余混淆:互余角关系仅适用于和为 90∘90∘ 的情况,不可随意扩展。
总结图示:


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









