







一.问题解决方式
1.记得事先加上"stdio.h"的头文件以及int fputc文件才可以进行以下输入。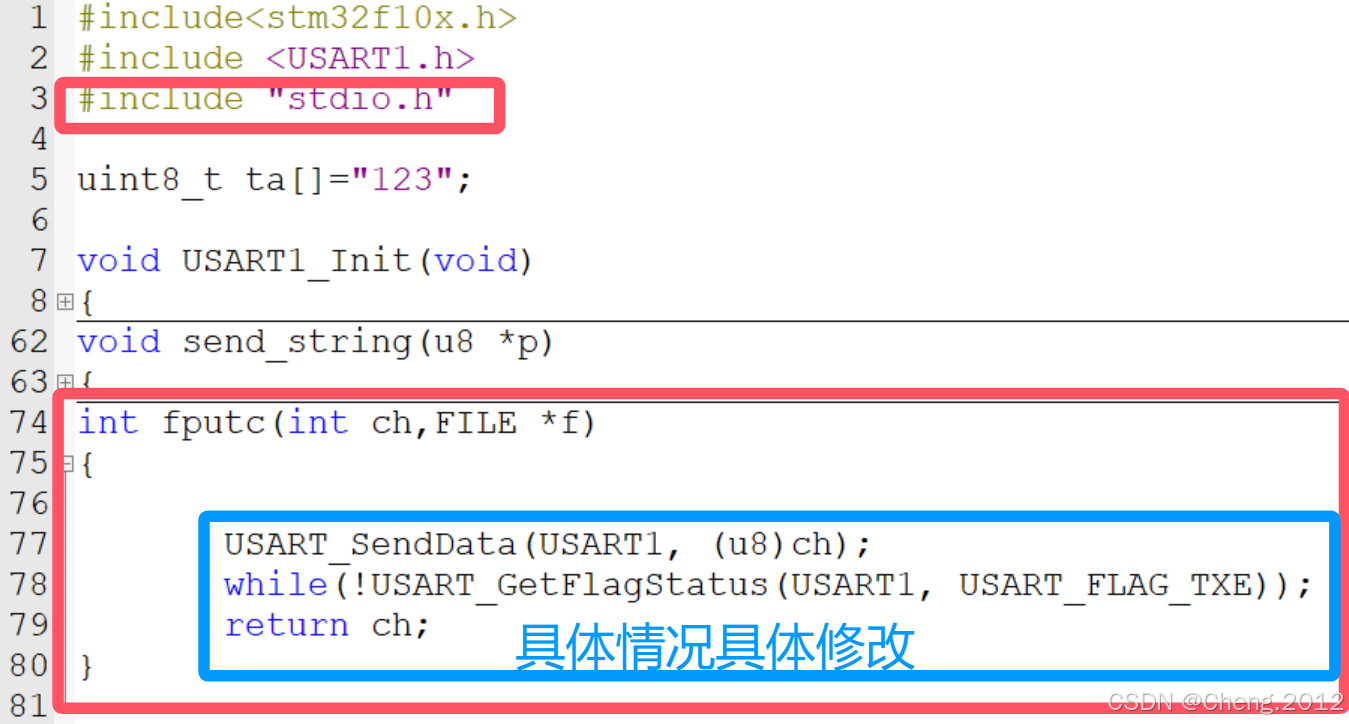
2.将魔术棒里的 LIB 勾上。 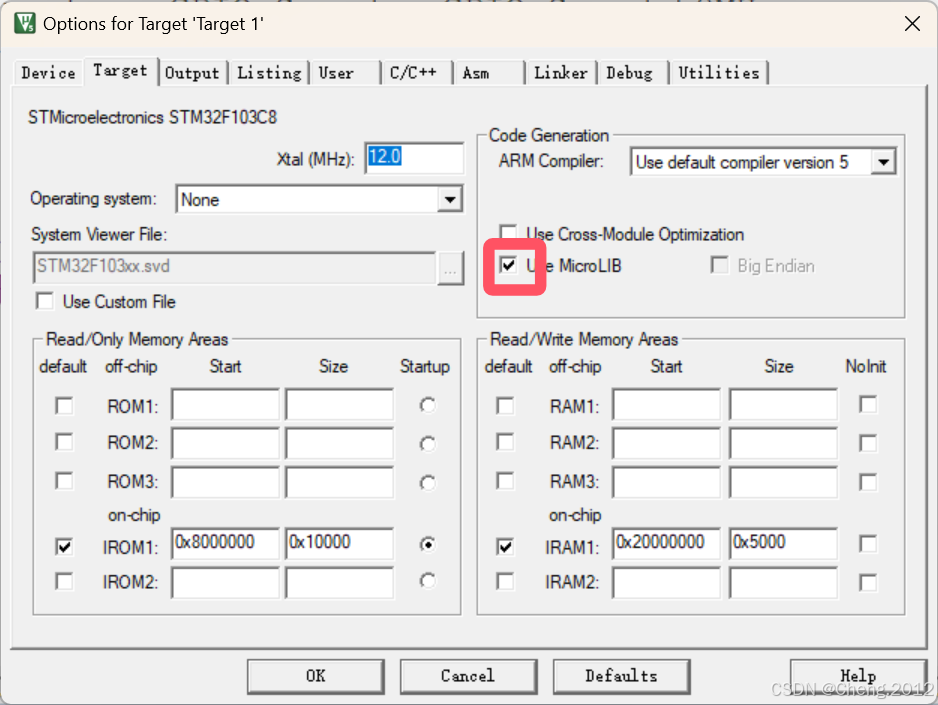
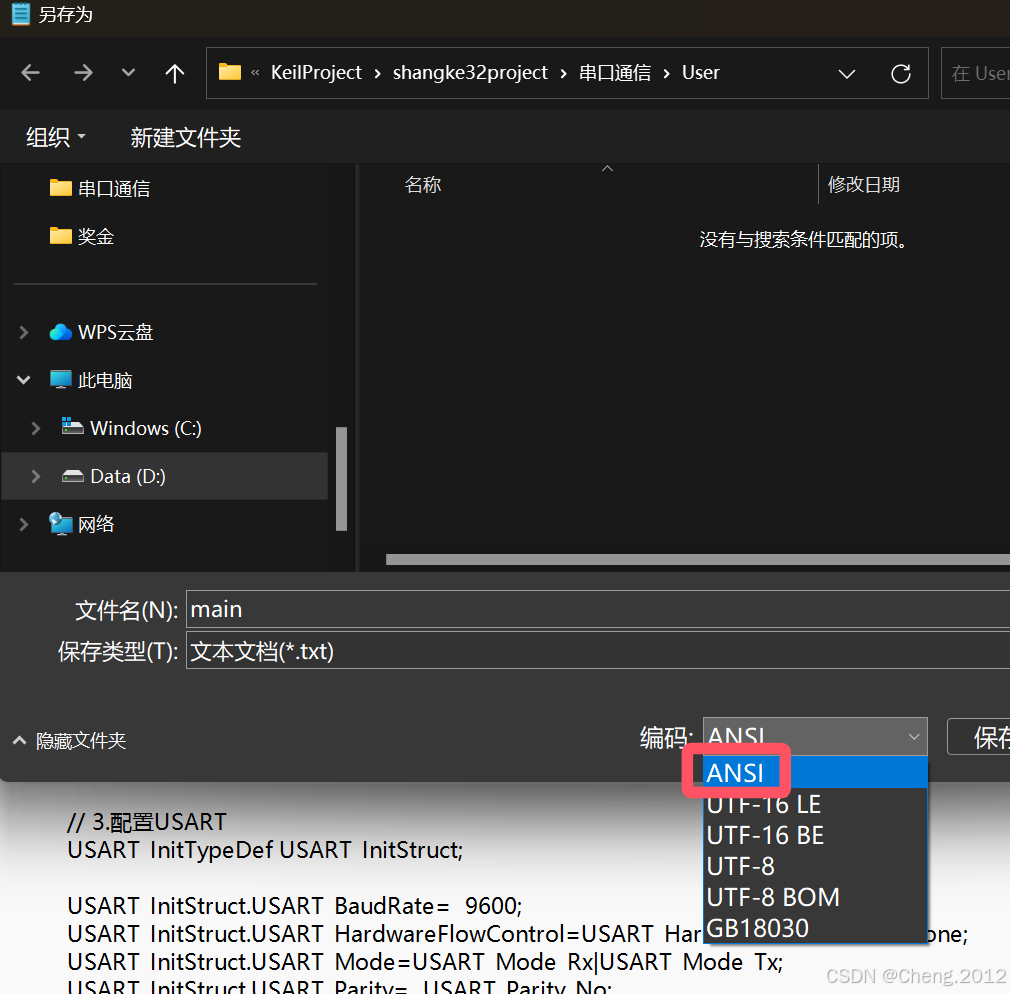
3.找到文件中 main.c 函数并且记事本方式打开,选择文件另存为,还是在本文件夹中,修改编码格式,将原本的编码格式(这里是UTF-8)改成ANSI格式。是否替换记得写是。
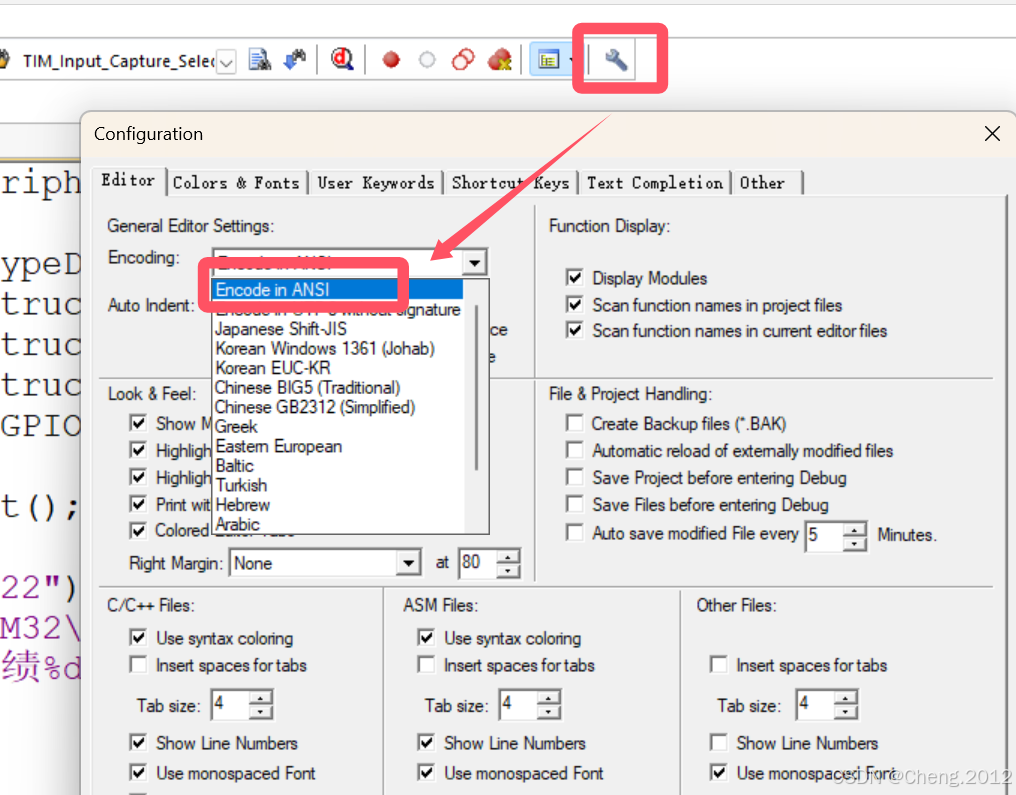
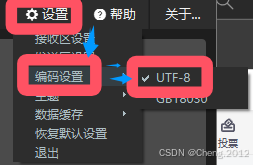
4.打开扳手,将这里选择到对应的格式
二.实际示例
#include<stm32f10x.h>
#include <USART1.h>
#include "stdio.h"
uint8_t ta[]="123";
void USART1_Init(void)
{
//ߪǴԮࠚ1ۍPA9bPA10քʱד
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
//2.Ƥ׃GPIO
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_9; //TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_10; //RX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 3.Ƥ׃USART
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate= 9600;
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_InitStruct.USART_Parity= USART_Parity_No;
USART_InitStruct.USART_StopBits= USART_StopBits_1;
USART_InitStruct.USART_WordLength= USART_WordLength_8b;
USART_Init( USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
USART_SendData(USART1, '4');
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=1);
USART_SendData(USART1, '1');
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=1);
USART_SendData(USART1, 0X41);
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=1);
USART_SendData(USART1, 41);
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=1);
USART_ITConfig(USART1,USART_FLAG_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStruct);
}
void send_string(u8 *p)
{
send_string(ta);
while(*p !=0)
{
USART_SendData(USART1, *p);
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
p++;
}
}
int fputc(int ch,FILE *f)
{
USART_SendData(USART1, (u8)ch);
while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
return ch;
}
int main()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART1_Init();
printf("2022"); //解决的地方!!!!!!!!!!!!!!!!!
printf("STM32\r\n"); //解决的地方!!!!!!!!!!!!!!!!!
printf("成绩%d\r\n",60); //解决的地方!!!!!!!!!!!!!!!!!
while(1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}
}
void USART1_IRQHandler(void)
{
u16 temp;
if(USART_GetITStatus( USART1, USART_IT_RXNE)==1)
{
temp=USART_ReceiveData(USART1);
USART_SendData(USART1, temp);
while(USART_GetITStatus(USART1,USART_FLAG_TXE));
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
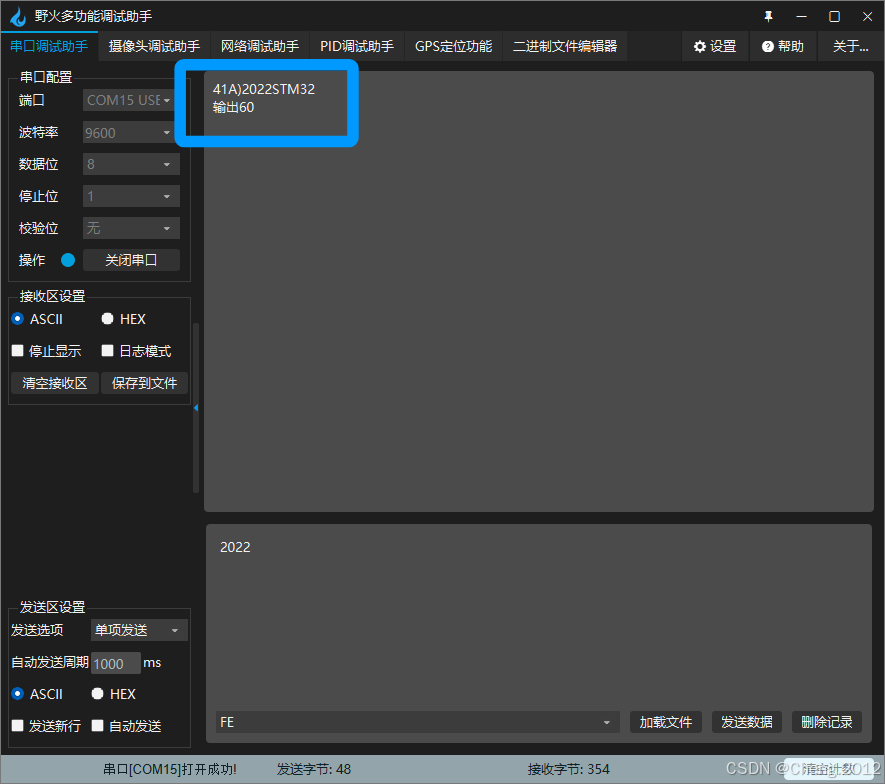
输出结果:
三.注意事项
这里以野火的串口助手为列子,因为刚刚修改的编码格式,所以串口助手也需要修改编码格式,其他的串口助手大致应该如此,如果其他串口助手无法实现可以另寻其他办法。

















 9099
9099

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









