






/*舵机封装函数
输入:目标角度
作用:输入多少度舵机转到多少度
在主函数中调用duoji_pros()函数即可
*/
#include "duoji.h"
void duoji_pros(float jiaodu)
{
int pwm;
float zhankongbi;
zhankongbi=(jiaodu+45)/18.0;
pwm=zhankongbi*800;
DL_TimerG_setCaptureCompareValue(PWM_duoji_INST, pwm, GPIO_PWM_duoji_C0_IDX);
}使用以上函数需要对pwm进行以下配置
1.注意命名和定时器选择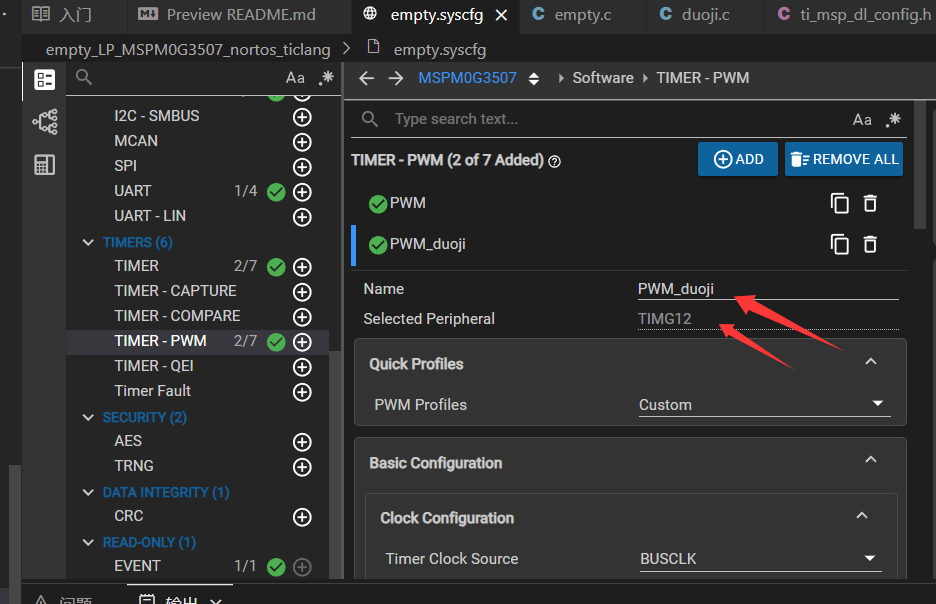
2.pwm周期设定为80000即可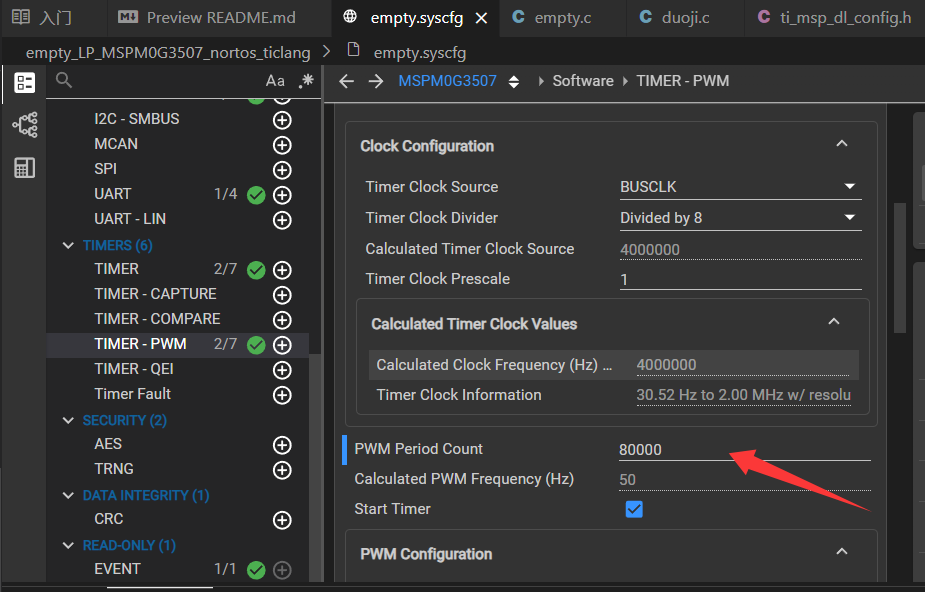

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









