







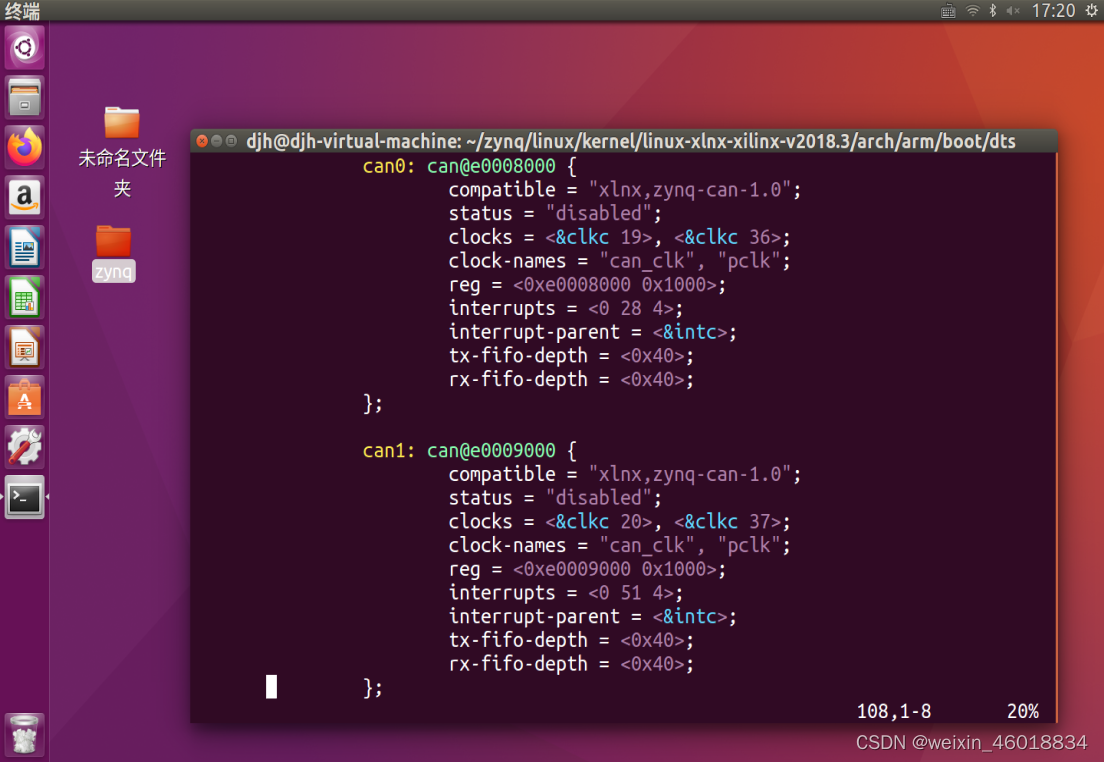
这是 xilinx 官方提供的 CAN 总线控制器节点配置信息,两个设备节点的 status 属性的值都是"disabled",也就是说默认情况下 CAN 外设是没有使能的,当我们在 vivado 软件中打开了相应的 CAN 控制器外设的时候,编译 hdf 文件得到pcw.dtsi 设备树文件中就会将 CAN 节点的 status 属性设置为"okay";我们打开arch/arm/boot/dts/pcw.dtsi 设备树文件,如下所示:
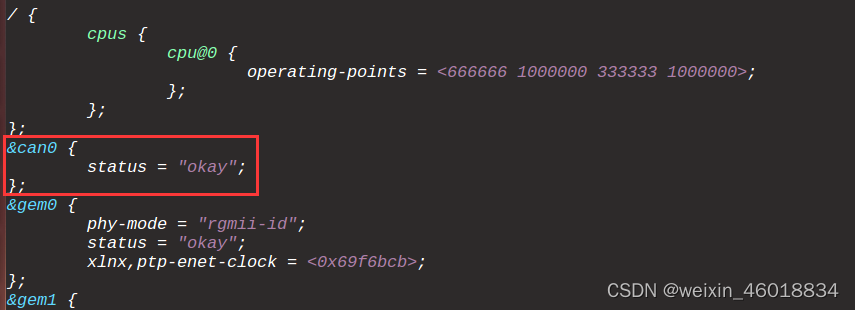
因为我们使用 vivado 工程只打开了 CAN0 控制器外设,所以 pcw.dtsi 设备树文件中就只
将 can0 节点的 status 设置为"okay",注意 pcw.dtsi 文件是自动生成的,我们不用对它进行
修改!
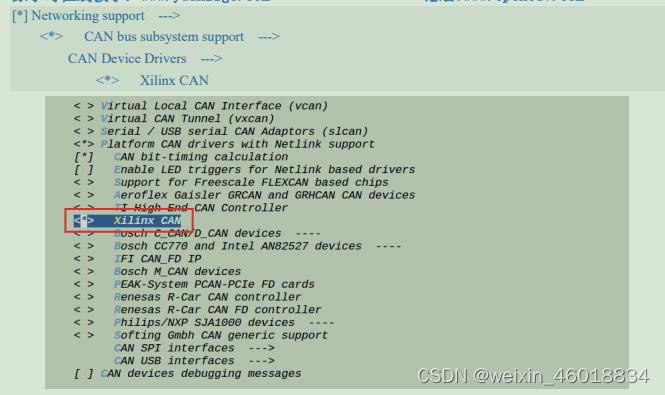
对于内核配置,我们使用的 Linux 内核源码默认已经使能了 ZYNQ CAN 驱动模块,所以这里不用再去配置了。
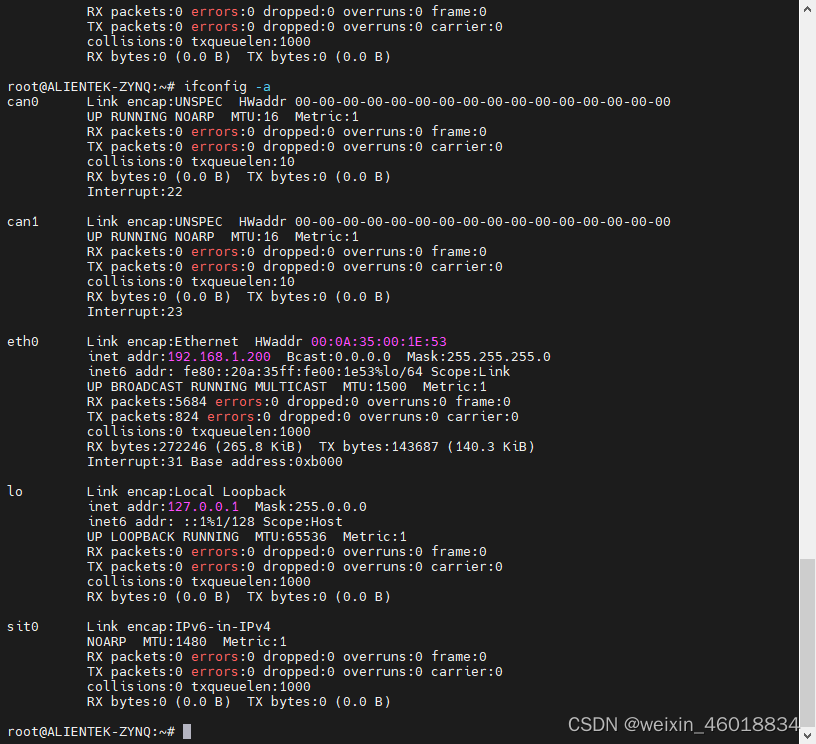
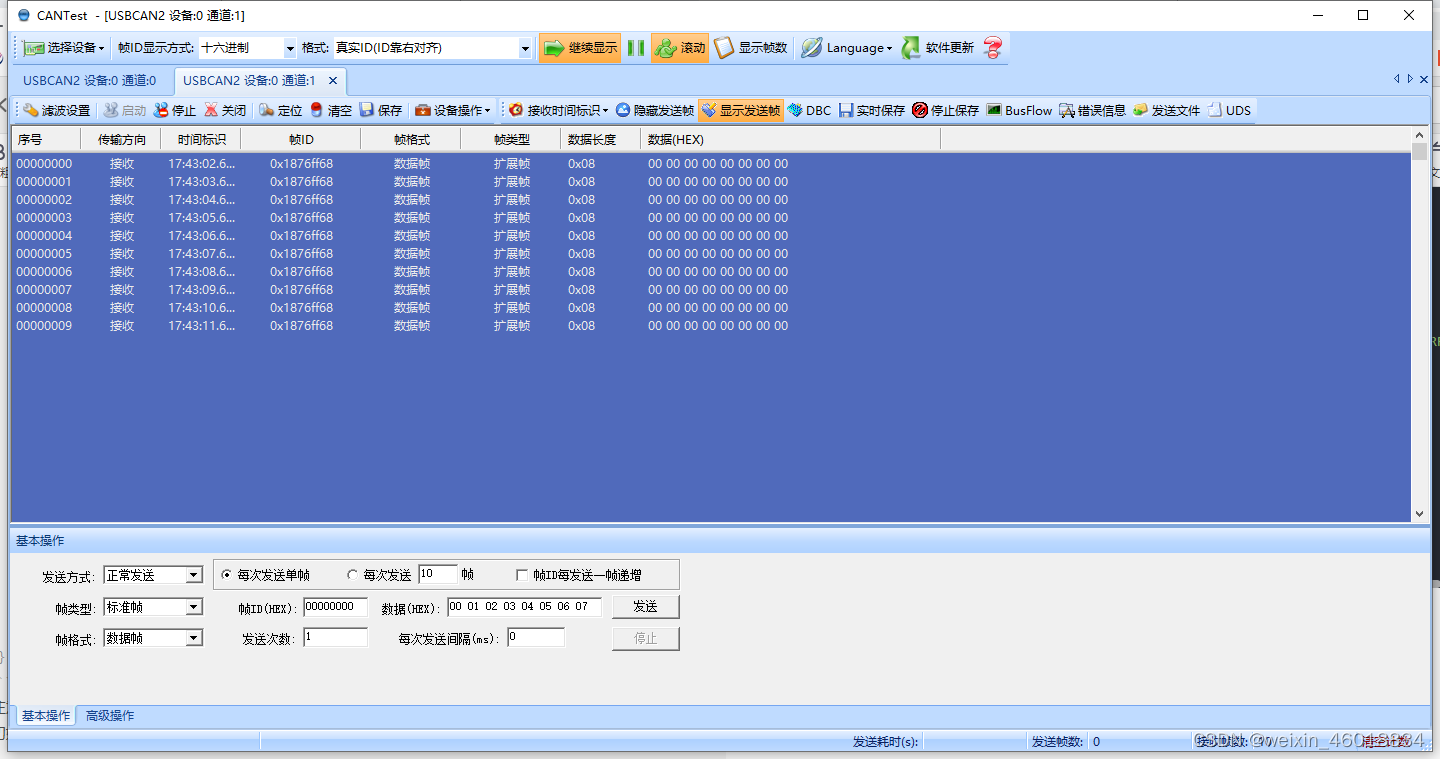
2.在CPU0的Linux系统配置完CAN后,此时在启动Linux系统后,输入ifconfig -a命令可以查看到CAN设备
此时如果要在CPU1下控制CNA设备,需要在CPU1下初始化,但是此初始化必须在CPU0启用CAN设备之后,否则控制失败,此处我的做法是,首先将Linux启动CAN的操作写为脚本放在Linux自启动程序下,启动CAN设备的操作为

然后在CPU1的程序中延迟10s左右,等Linux系统起来运行CAN控制器启动脚本之后,再在CPU1下初始化CAN
下面展示一些在ZYNQ下初始化CAN控制器的代码片。
// An highlighted block
BOOLEAN Can0Ps\_Init(uint8\_t canid,XScuGic \*IntcInstPtr, XCanPs \*CanInstPtr)
{
int Status;
XCanPs_Config \*ConfigPtr;
/\*
\* Initialize the Can device.
\*/
ConfigPtr = XCanPs\_LookupConfig(CAN0\_DEVICE\_ID);
if (ConfigPtr == NULL) {
return XST\_FAILURE;
}
XCanPs\_CfgInitialize(CanInstPtr,
ConfigPtr,
ConfigPtr->BaseAddr);
/\*
\* Enter Configuration Mode if the device is not currently in
\* Configuration Mode.
\*/
XCanPs\_EnterMode(CanInstPtr, XCANPS\_MODE\_CONFIG);
while(XCanPs\_GetMode(CanInstPtr) != XCANPS\_MODE\_CONFIG);
/\*
\* Setup Baud Rate Prescaler Register (BRPR) and
\* Bit Timing Register (BTR).
\*/
XCanPs\_SetBaudRatePrescaler(CanInstPtr, CAN\_CFG[0].PreFreq);
XCanPs\_SetBitTiming(CanInstPtr, CAN\_CFG[0].SyncSeg,
CAN\_CFG[0].TimeSeg2,
CAN\_CFG[0].TimeSeg1);
/\*
\* Set interrupt handlers.
\*/
// XCanPs\_SetHandler(CanInstPtr, XCANPS\_HANDLER\_SEND,
// (void \*)CAN0\_SendHandler, (void \*)CanInstPtr);
XCanPs\_SetHandler(CanInstPtr, XCANPS\_HANDLER\_RECV,
(void \*)CAN0_RecvHandler, (void \*)CanInstPtr);
XCanPs\_SetHandler(CanInstPtr, XCANPS\_HANDLER\_ERROR,
(void \*)CAN0_ErrorHandler, (void \*)CanInstPtr);
XCanPs\_SetHandler(CanInstPtr, XCANPS\_HANDLER\_EVENT,
(void \*)CAN0_EventHandler, (void \*)CanInstPtr);
/\*
\* Connect to the interrupt controller.
\*/
Status = SetupInterruptSystem(IntcInstPtr,
CanInstPtr,
CAN0\_INTR\_VEC\_ID);
if (Status != XST\_SUCCESS) {
return XST\_FAILURE;
}
/\*
\* Enable all interrupts in CAN device.
XCANPS\_IXR\_TXOK\_MASK
\*/
XCanPs\_IntrEnable(CanInstPtr, (uint32_t)XCANPS\_IXR\_RXNEMP\_MASK | XCANPS\_IXR\_ERROR\_MASK |
XCANPS\_IXR\_BSOFF\_MASK);
/\*
\* Enter Loop Back Mode.
\*/
XCanPs\_EnterMode(CanInstPtr, XCANPS\_MODE\_NORMAL);
while(XCanPs\_GetMode(CanInstPtr) != XCANPS\_MODE\_NORMAL);
return XST\_SUCCESS;
}
注意,CPU1下的初始化程序,必须在Linux启动CAN控制器之后执行,否则出错。
初始化完成后再去控制CAN发送数据,此时数据可正常发送
最后
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Java工程师,想要提升技能,往往是自己摸索成长,自己不成体系的自学效果低效漫长且无助。
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!
友可以戳我获取!!**](https://bbs.csdn.net/topics/618654289)
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!















 1134
1134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









