







既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
其中cv2.MORPH\_BLACKHAT表示的就是黑帽操作的意思,kernel表示卷积核。
然后我们看一下图像处理的核心函数:
k=np.ones((5,5),np.uint8)
r=cv2.morphologyEx(o,cv2.MORPH_BLACKHAT,k)
得到的结果是:
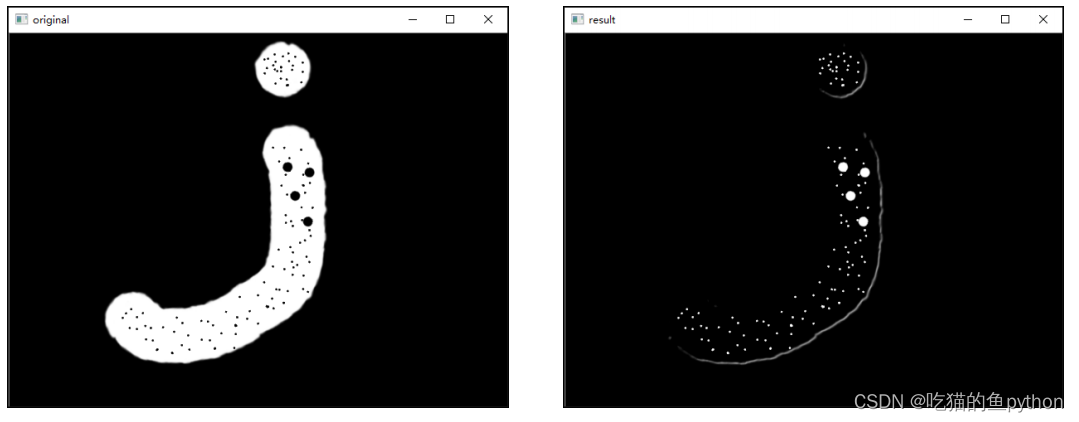
可以看到我们把图像中的小气泡都取出来了。
### ⭐️2.Sobel算子理论基础及实际操作
首先我们来了解一个边界的定义,看一个图来理解更加的明白。
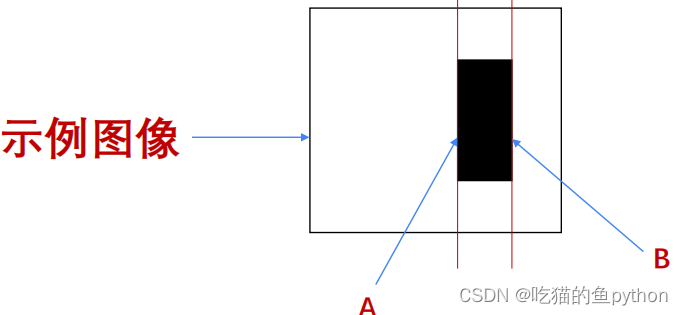
对于如图中的水平梯度,我们看A、B两个地方,右侧像素值减去左侧像素值不为0,那么我们就说在此图中A列和B列是边界,否则不是边界。同样对于垂直梯度我们也是这样定义。
对于Sobel算子,我们先来看x方向他进行了什么操作:
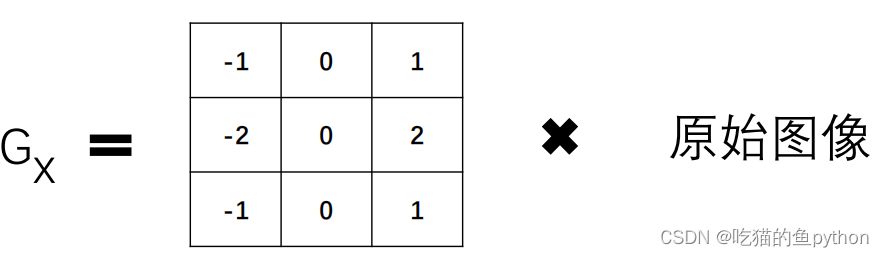
P5x=(p3-p1)+2\*(p6-p4)+(p9-p7)
右侧像素值减去左侧像素值,中间行参数稍大为2。
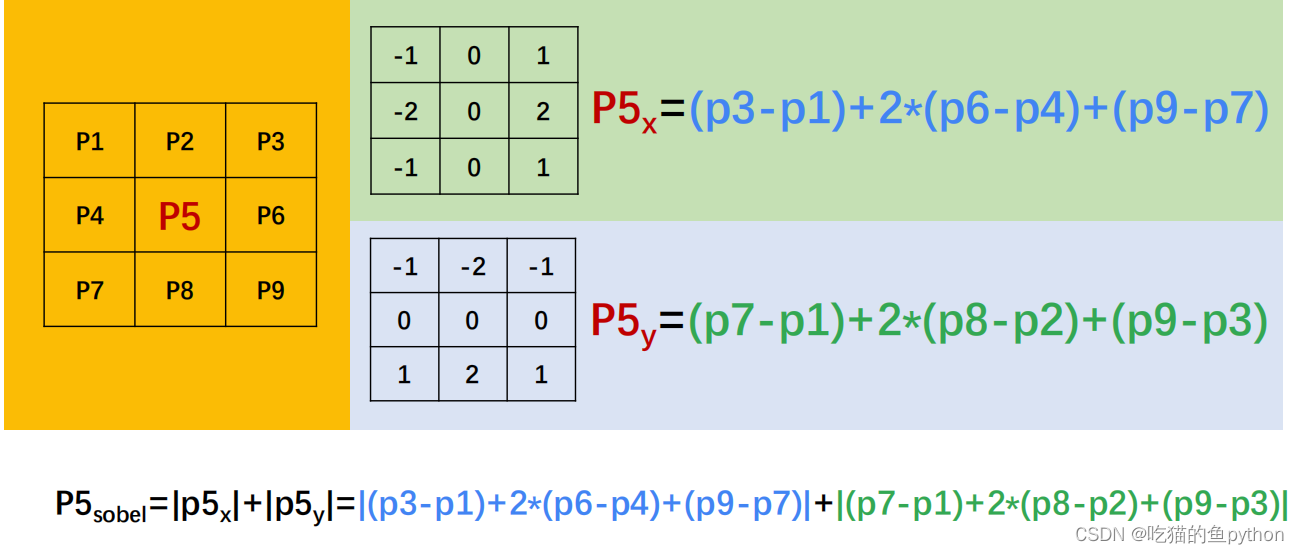
同样对于y轴方向也做了一个同样的操作,
P5y=(p7-p1)+2\*(p8-p2)+(p9-p3)
下一行像素值减去上一行像素值,中间列参数稍大为2
然后我们计算了一个近似梯度值:
G= 根号(𝐺𝑥2 + 𝐺𝑦2)
简化版本就是:
G=|𝐺𝑥|+| 𝐺𝑦|
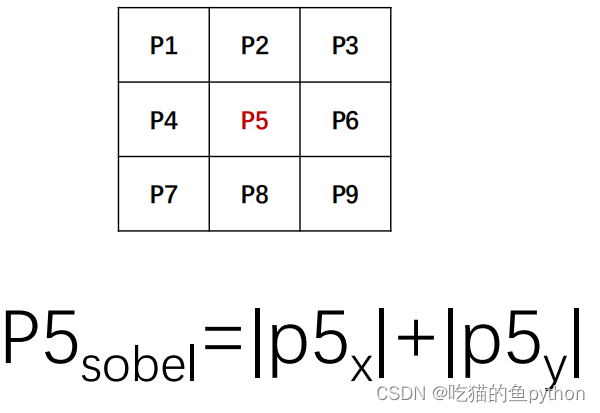
这中心点的P5的Sobel算子就是按照这个方式进行计算。
对于P5点完成的Sobel算子计算就是这样:
那么好,我们来看一下在python中对于Sobel是一个什么样的函数:
dst = cv2.Sobel( src , ddepth , dx , dy , [ksize] )
其中src表示原始图像,ddeph表示图像的深度,那么我们一般设定为-1,用来表示和原图像保持一致。dx,dy表示x轴的方向或者y轴的方向,ksize表示核大小。
其中我们在已经知道的256色位图中,白色点像素值255,黑色点像素值0。
**这里对于dx,dy方向为什么我们取绝对值进行一下解答,因为加入一块黑块在一个白色背景下,那么我们在水平方向上,左侧那么得到的数值就是一个负数,对于右侧那么我们得到的是就是一个正常的正数,那么对于OpenCV来说,当我们没有加绝对值得时候如果出现了负数,统一处理成0。**
根据图我们就可以知道,左侧的线被OpenCV处理成了0。所以我们这里要加上一个绝对的运算。无论对于水平方向还是垂直方向都是如此。
然后我们要将原始图像处理成256为的色位图。其函数是:
dst = cv2.convertScaleAbs( src [, alpha[, beta]] )
**目标图像=调整(原始图像\*alpha+beta)**
其中alpha和beta可以理解为权重的意思。
当我们想要计算水平方向上的Sobel算子的时候,那么我们就设定函数中的参数dx=1,dy=0.对于垂直方向也是如此。那么这里我们就会想:如果我们两个方向都一起设置这样是不是比计算完x的方向然后计算y方向,然后进行结合这样是不是更加的方便一些呢?也就是说下图中的方式一比方式二更加的简介方便呢?
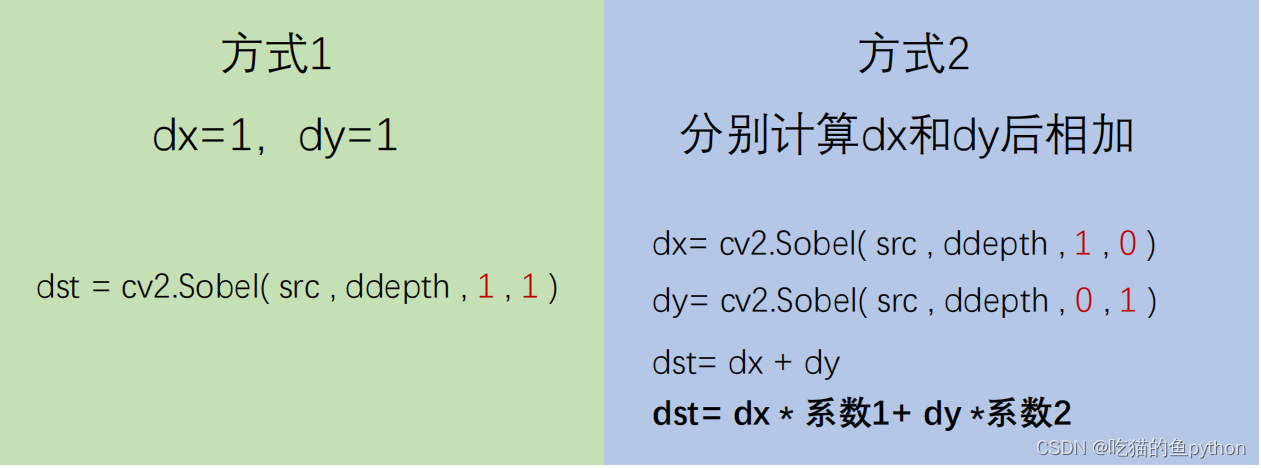
事实上不是这样的,而且两个图像有很大的差异,这个我们后续会看到结果。
那么当我们完成了这一步操作之后,我们还要做两个图像的权重和,其函数是:
dst=cv2.addWeighted( src1 , alpha , src2 , beta , gamma )
这里我们说的通俗一点就是,src1表示计算的x轴方向的图像,alpha表示x轴方向上的图像所占的比重,src2表示计算的y轴方向的图像,beta表示y轴方向上的图像所占的比重是多少,最后gamma表示一个修正数值。
>
> dst(I)=saturate(src1(I)\*alpha+src2(I)\*beta+gamma)
>
>
>
接下来我们来验证一下各个结果:
import cv2
import numpy as np
o = cv2.imread(‘image\sobel4.bmp’,cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(o,-1,1,0)
cv2.imshow(“original”,o)
cv2.imshow(“x”,sobelx)
cv2.waitKey()
cv2.destroyAllWindows()
这里我们没有加上绝对值计算x轴方向上的Sobel算子,得到的结果是:
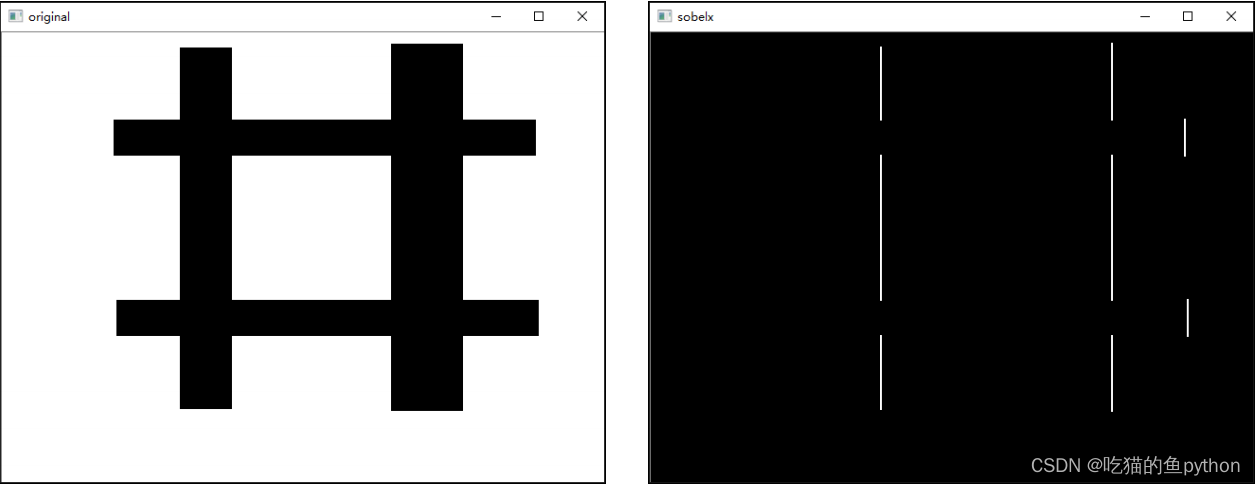
很明显左侧的没有计算出来。
import cv2
import numpy as np
o = cv2.imread(‘image\sobel4.bmp’,cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(o,cv2.CV_64F,1,0)
sobelx = cv2.convertScaleAbs(sobelx) # 转回uint8
cv2.imshow(“original”,o)
cv2.imshow(“x”,sobelx)
cv2.waitKey()
cv2.destroyAllWindows()
当我们加上绝对值后的结果是:
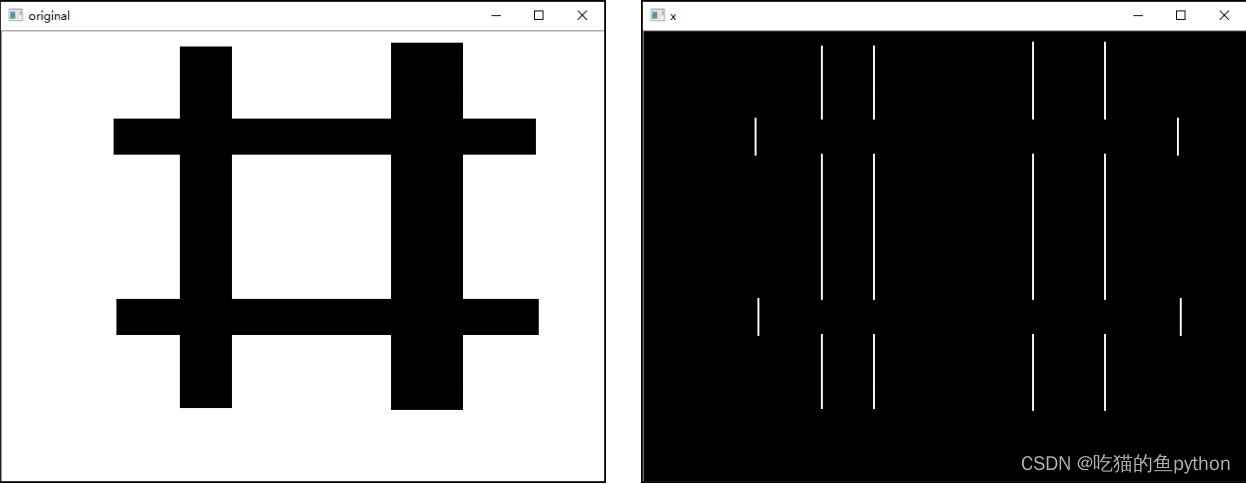
对于垂直方向的结果也是如此。最后我们计算出x,y的方向。进行融合并且和直接将x,y表示成1的结果进行一下对比,我们来看结果:
核心代码:
sobelx = cv2.Sobel(o,cv2.CV_64F,1,0)
sobely = cv2.Sobel(o,cv2.CV_64F,0,1)
sobelx = cv2.convertScaleAbs(sobelx) # 转回uint8
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
sobelxy11=cv2.Sobel(o,cv2.CV_64F,1,1)
sobelxy11=cv2.convertScaleAbs(sobelxy11)
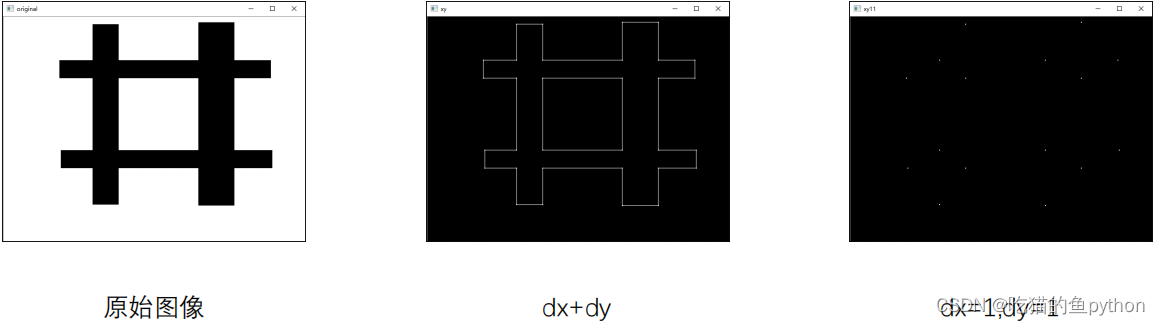
根据结果我们可以得到:使用了dx,dy的情况下无法检测到边。然后我们用lena来测试一下结果。
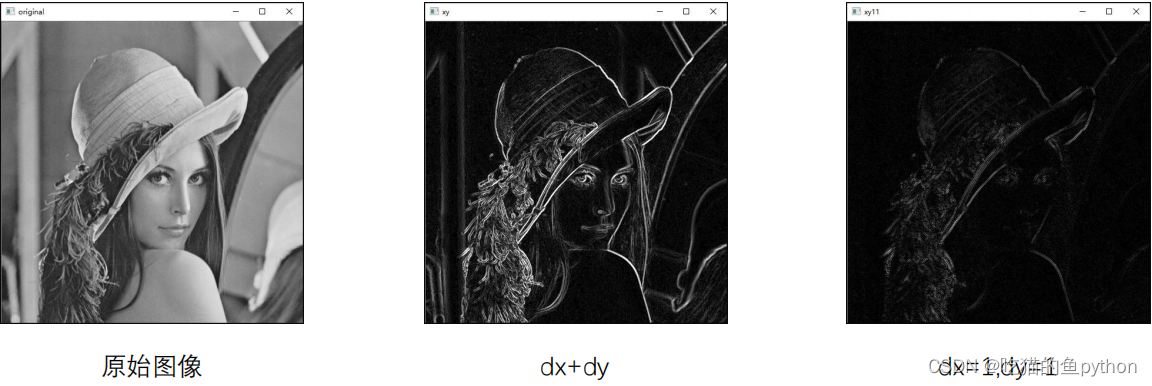
在我们相加表示的情况下,边缘检测的线条十分清晰,将分割的地带表达的特别清楚。
### ⭐️3.Scharr算子简介及相关操作
经过大量的科学家验证,发现3\*3的Sobel算子可能并不是特别的精确,于是又提出了相应的Scharr算子,其实就是改变了运算的尺度而已。
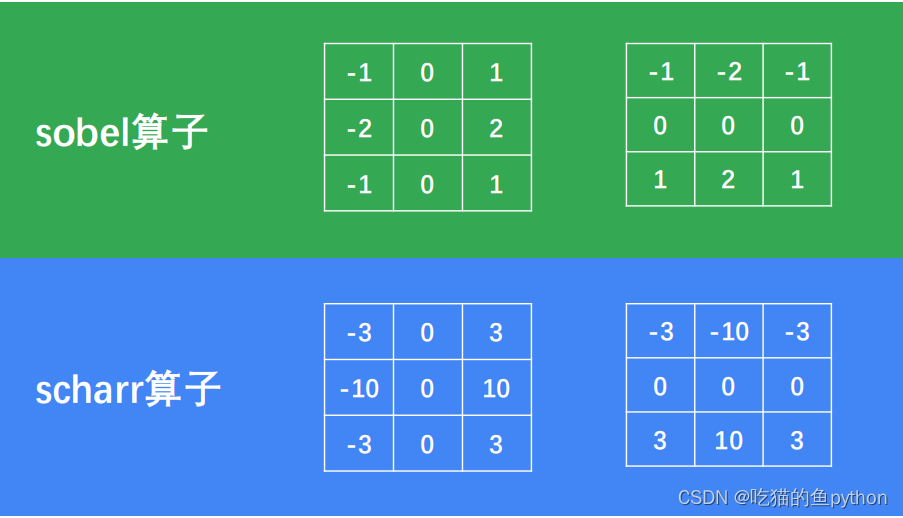
Sobel算子由原来的121变为了3 10 3,这样的一个组合。其余的操作都是和Sobel算子一致我们来简要的说明一下:
**dst=Scharr(src, ddpeth, dx, dy)**
这里面少了核的大小,但是和Sobel算子依然一直,参数这里就不解释了,唯一不同的就是我们使用Sobel算子可以设置成dx=1,dy=1。那么对于Scharr算子如果这样设置就会报错。这里需要注意一下。满足条件:
**dx >= 0 && dy >= 0 && dx+dy == 1**
import cv2
import numpy as np
o = cv2.imread(‘image\scharr.bmp’,cv2.IMREAD_GRAYSCALE)
scharrx = cv2.Scharr(o,cv2.CV_64F,1,0)
scharry = cv2.Scharr(o,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx) # 转回uint8
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
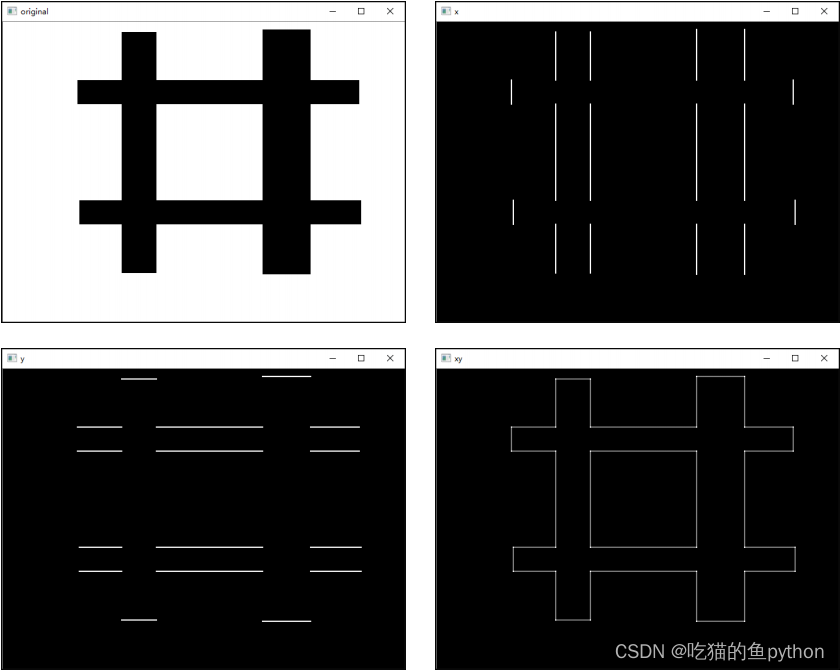
cv2.imshow(“original”,o)
cv2.imshow(“x”,scharrx)
cv2.imshow(“y”,scharry)
cv2.imshow(“xy”,scharrxy)
cv2.waitKey()
cv2.destroyAllWindows()
### ⭐️4.Sobel算子和Scharr算子的比较
对于上述我们的测试图,其实看不出来Sobel算子和Scharr算子到底有什么区别,看起来是一致的,那么我们这里使用大美女lena进行一次Sobel和Scharr,得到结果进行对比一下可以知道:
sobelx = cv2.Sobel(o,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(o,cv2.CV_64F,0,1,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx) # 转回uint8
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
scharrx = cv2.Scharr(o,cv2.CV_64F,1,0)
scharry = cv2.Scharr(o,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx) # 转回uint8
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
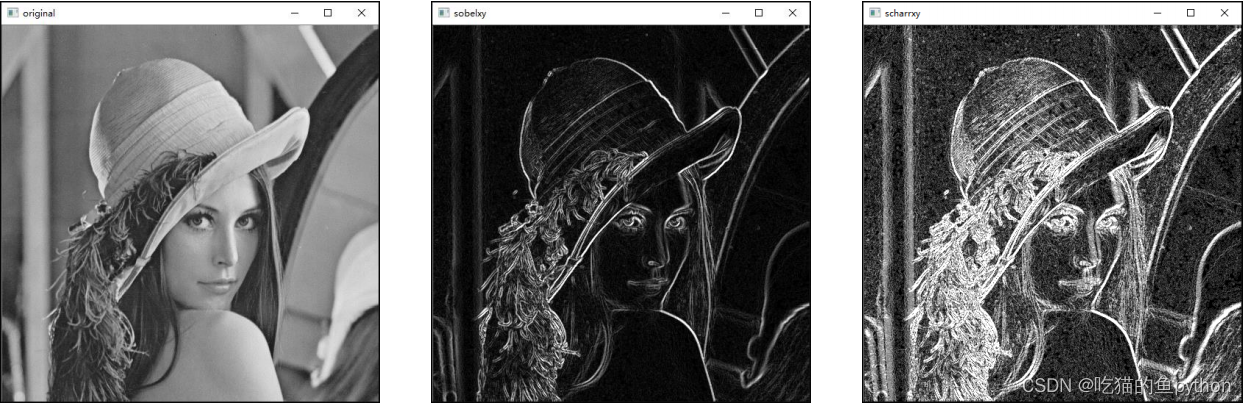
很明显,这里我们看一下了lena的肩膀部分,可以看到使用Shcarr算子进行计算的时候,刻画的更加细致。
### ⭐️5.laplacian算子简介及相关操作
拉普拉斯算子类似于二阶sobel导数。实际上,在OpenCV中通过调用sobel算子来计算拉普拉斯算子。使用的公式为:
**∆𝑠𝑟𝑐 = 𝜕2𝑠𝑟𝑐/𝜕𝑥2 + 𝜕2𝑠𝑟𝑐/𝜕𝑦2**
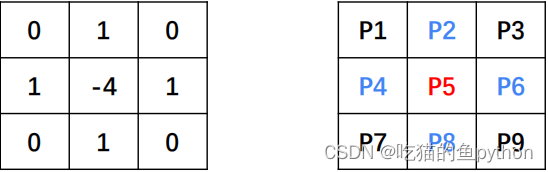
使用的卷积核也和Sobel和Shcarr算子的不一致:

看起来有点像高斯的,哈哈哈。
这里我们进行一下讲解,
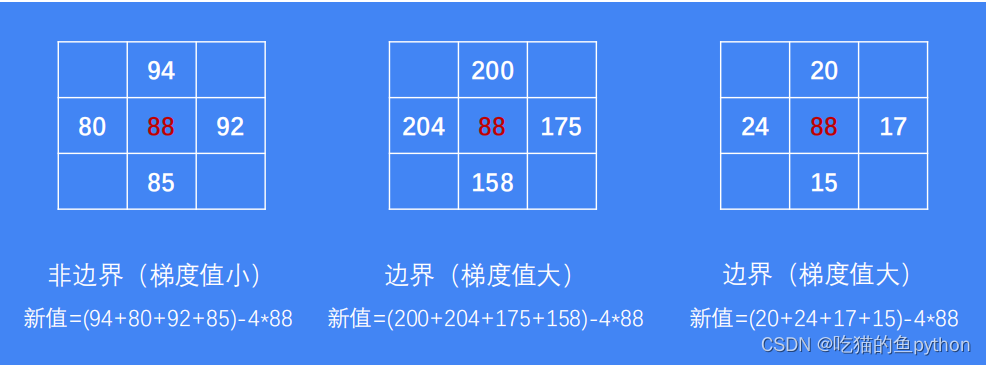
P5new=(p2+p4+p6+p8)-4\*p5
当没有处于边界的时候呢,我们可以得到P5的数值是变化不大的,当处于边界的时候,P5的数值是变化非常大的,这是因为什么呢?
对于拉普拉斯算子的函数估计我们也可以猜到:
**dst = cv2.Laplacian( src, ddepth )**
自然是没有水平方向和垂直方向的。
**实际操作中,计算梯度值可能会出现负数。通常处理的图像是np.uint8类型,如果结果也是该类型,所有负数会自动截断为0,发生信息丢失。所以,通常计算时,使用更高的数据类型cv2.CV\_64F,取绝对值后,再转换为np.uint(cv2.CV\_8U)类型。**
所以我们还是要取一次绝对值的运算:
**dst = cv2.convertScaleAbs( src )**
import cv2
import numpy as np
o = cv2.imread(‘image\laplacian.bmp’,cv2.IMREAD_GRAYSCALE)
laplacian = cv2.Laplacian(o,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian) # 转回uint8
cv2.imshow(“original”,o)
cv2.imshow(“laplacian”,laplacian)
cv2.waitKey()
cv2.destroyAllWindows()
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
9ZOAd-1714852485356)]
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 5799
5799











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









