






目录
前言
编者是一名大二机械学生,在专业基础知识方面有所欠缺,嵌入式系统开发经验积累较少,文章若有错误,欢迎各位开发者评论指正。
作为一名热衷于技术创新和嵌入式系统开发的技术爱好者,本次参与到RDK X5测评与开发的确给了我全新的开发体验。硬件外观惊艳、产品性能优越、软件设计新颖、D-Robotics平台社区支持。RDK X5的创新性与实用性全新结合让其成为实现我新想法的强大工具。
本报告将深入评测RDK X5开发板的各项功能,包括其性能、易用性及与其他开发工具,我将分享我在使用过程中的真实体验和心得,为那些考虑购买或使用该开发板的开发者提供参考和建议。
无论您是刚入门的开发者,还是经验丰富的专业人士,希望我对RDK X5的分析能够帮助您更好地评估这一开发板的价值和适用性。期待与大家的交流和分享!
测评
一、上手体验
(一)外观
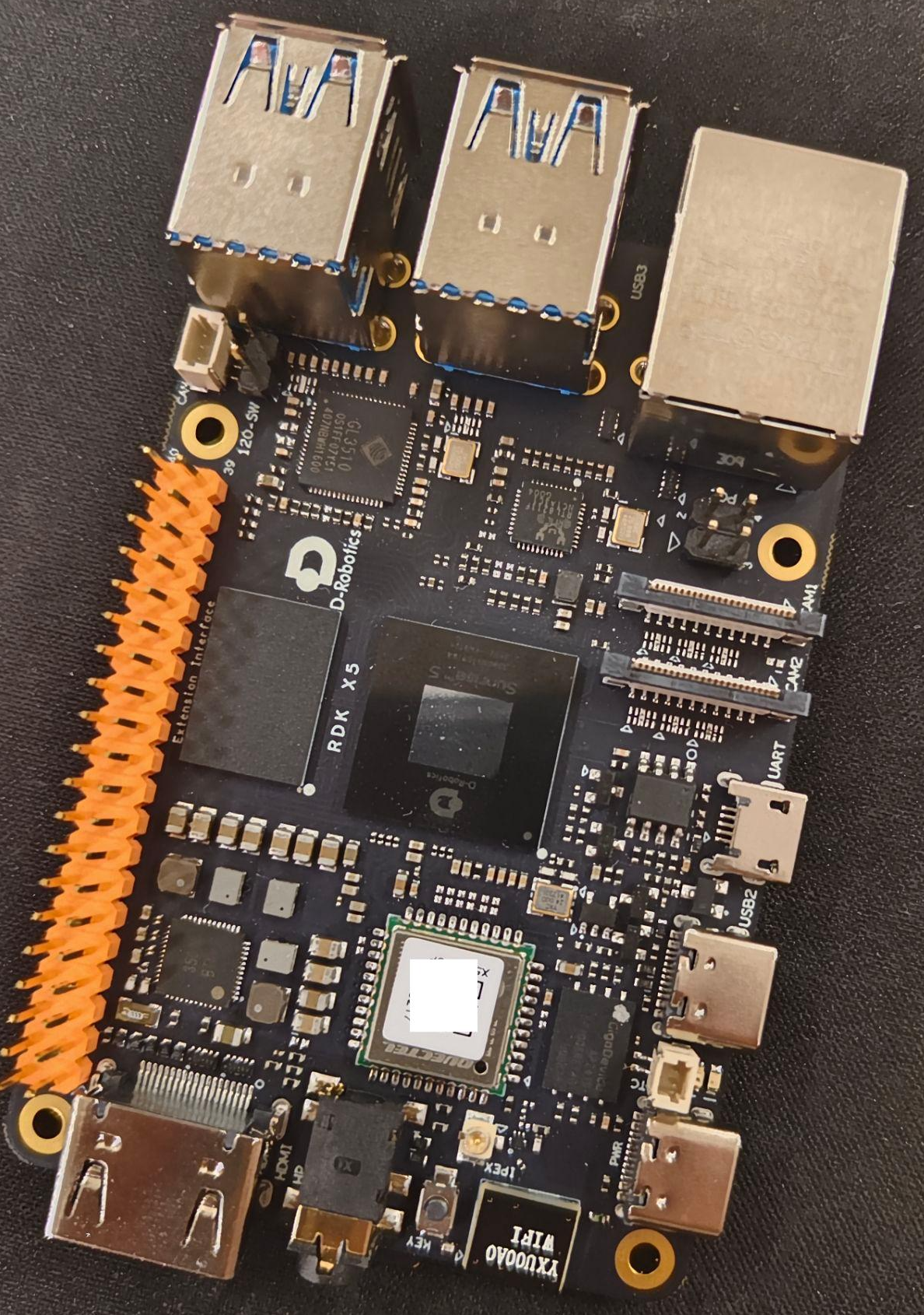
相较于RDK X3,RDK X5在外观与性能上都有很大的提升,RDK X5核心板外观设计较为独特,抛弃原有的表面金属材质,采用了表面光滑镜面设计,RDK X5的焊点也十分整齐清晰。在接口方面,RDK X5增加很多种类接口,如多标准兼容耳机接口、Micro USB,原有的接口在数量上也有所提升,给开发者提供更多的选择。
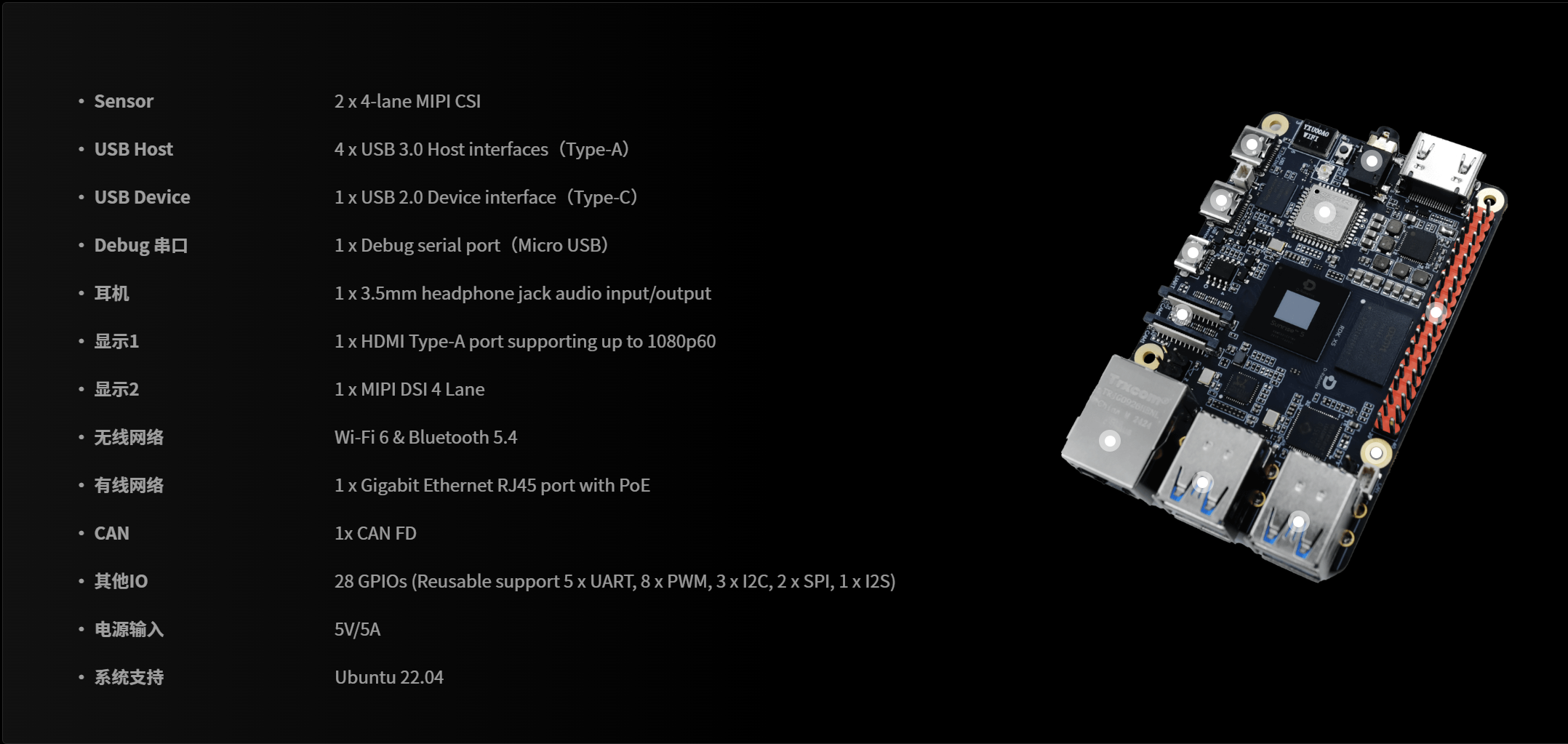
性能上,CPU核心升级,BPU提升到10TOPS算力,支持更多并发任务,数据处理更快。

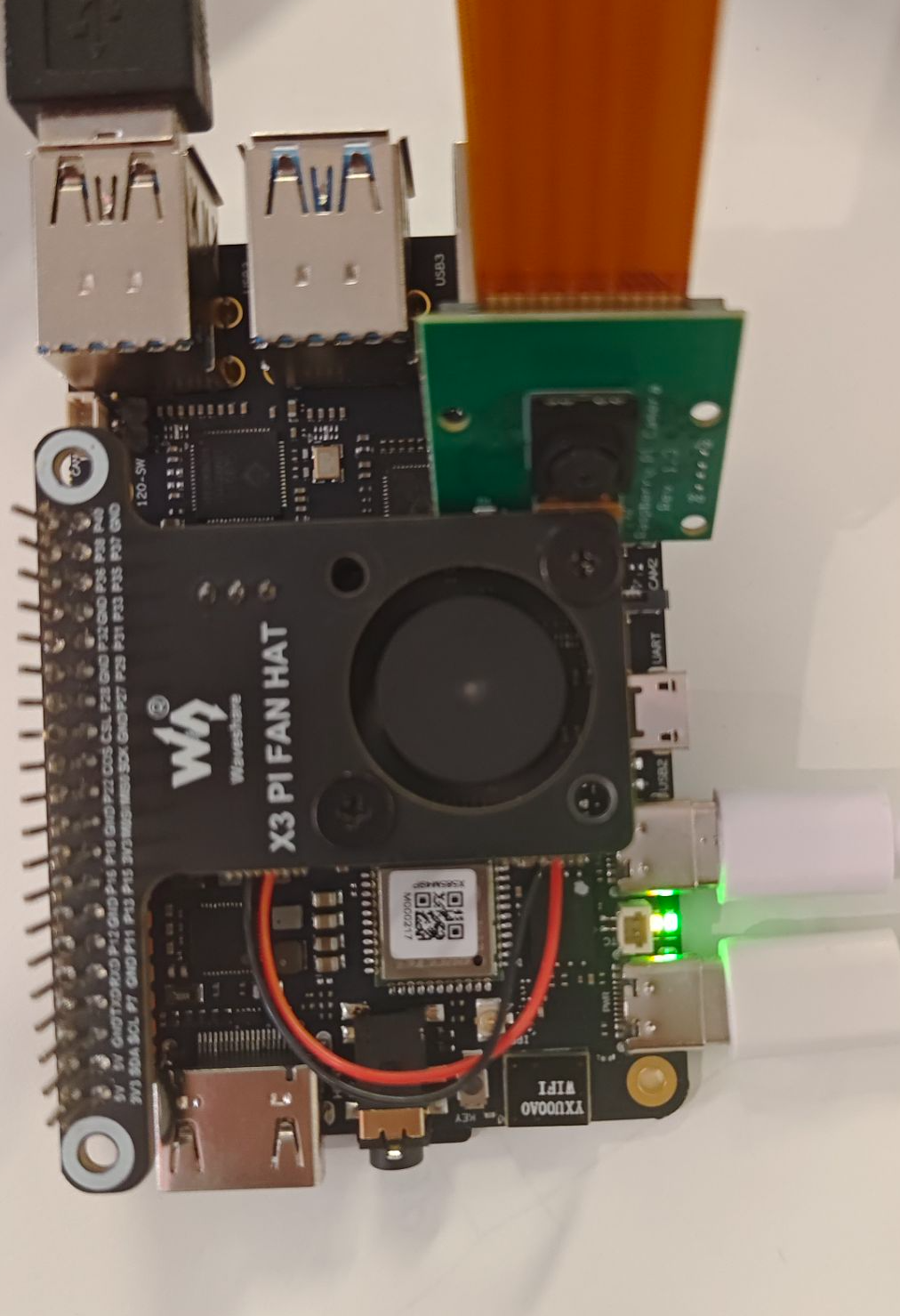
连接电源、闪连,连接USB摄像头与MIPI 摄像头,将原来的RDK X3的散热扩展装上(不太适配可购买最新款),避免长时间使用后核心板温度过高。建议购买X5的外壳套件或者3D打印外壳,避免金属元件与导体接触。
(二)烧录
RDK X5增加了闪连功能,SD卡烧录可采用RDK Studio烧录与读卡器烧录,可参考小编的这篇帖子,包含了这两种烧录方式详细介绍以及RDK Studio闪连教程。
链接:https://developer.d-robotics.cc/forumDetail/253775338902237326
(三)连接
1、串口连接
电脑端下载需要安装串口驱动,使用Micro USB数据线连接RDK X5调试串口与电脑USB接口。使用MobaXterm软件进行连接。缺少Micro USB数据线,暂无演示。
2、RDK Studio连接
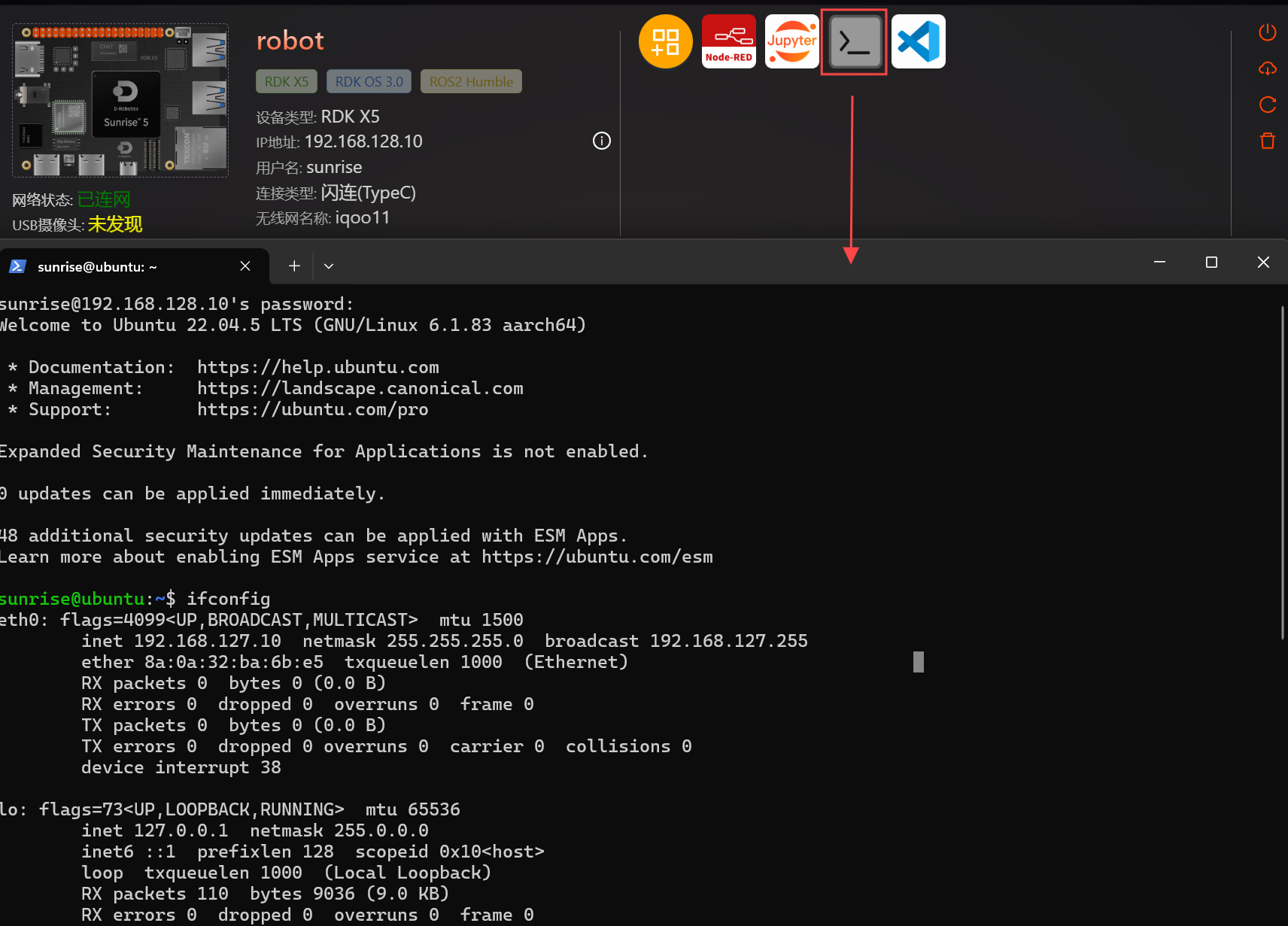
在进行RDK X5闪连后,可打开终端。可使用指令ifconfig,可查看网络接口信息。
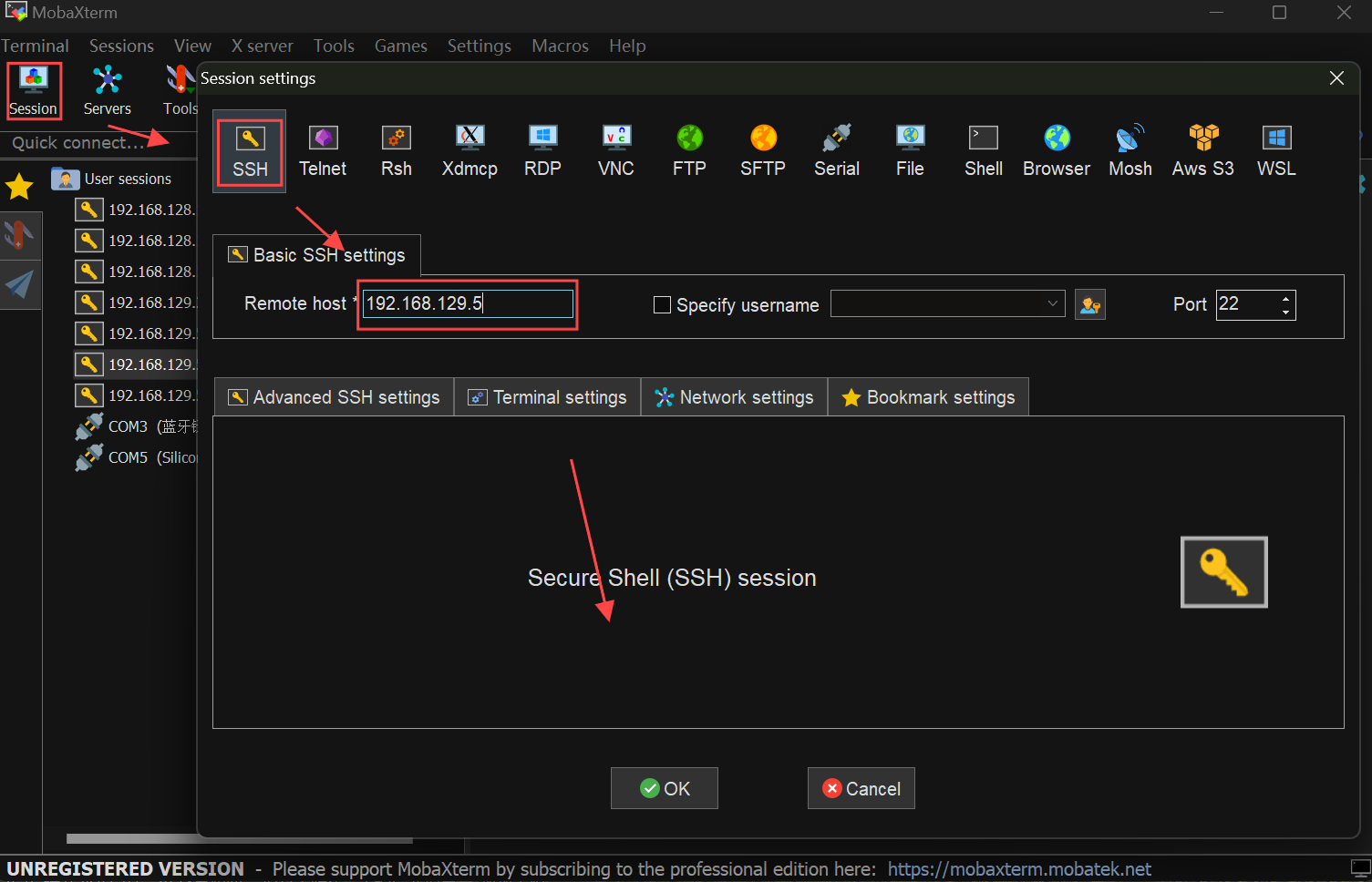
3、ssh连接
在1、2中指令ifconfig,查看网络接口信息中的无线网络连接 IP wlan0,在MobaXterm中进行连接。
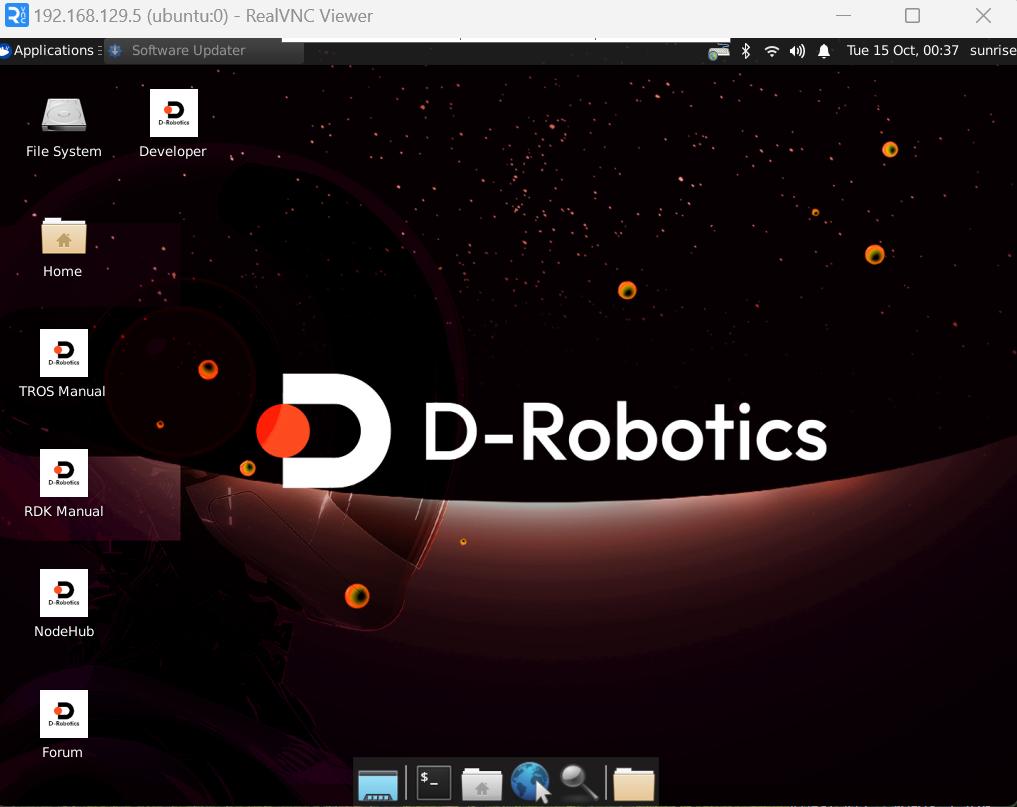
4、VNC连接
首先需要在RDK X5中启用VNC服务,然后在软件vncviewer配置无线网络连接 IP ,可实现远程桌面连接。
二、RDK Studio
全新推出的集成化智能机器人开发环境,RDK Studio的确给了我一个较大的震撼。在我近期开发使用中,“闪连一下”这句话的含金量也在不断提高。也是一次创新性与实用性的全新结合。
(一)闪连
可参考小编的帖子:【教程】RDK X5闪连RDK Studio教程以及相关问题
链接:https://developer.d-robotics.cc/forumDetail/253775338902237326
(二)功能体验
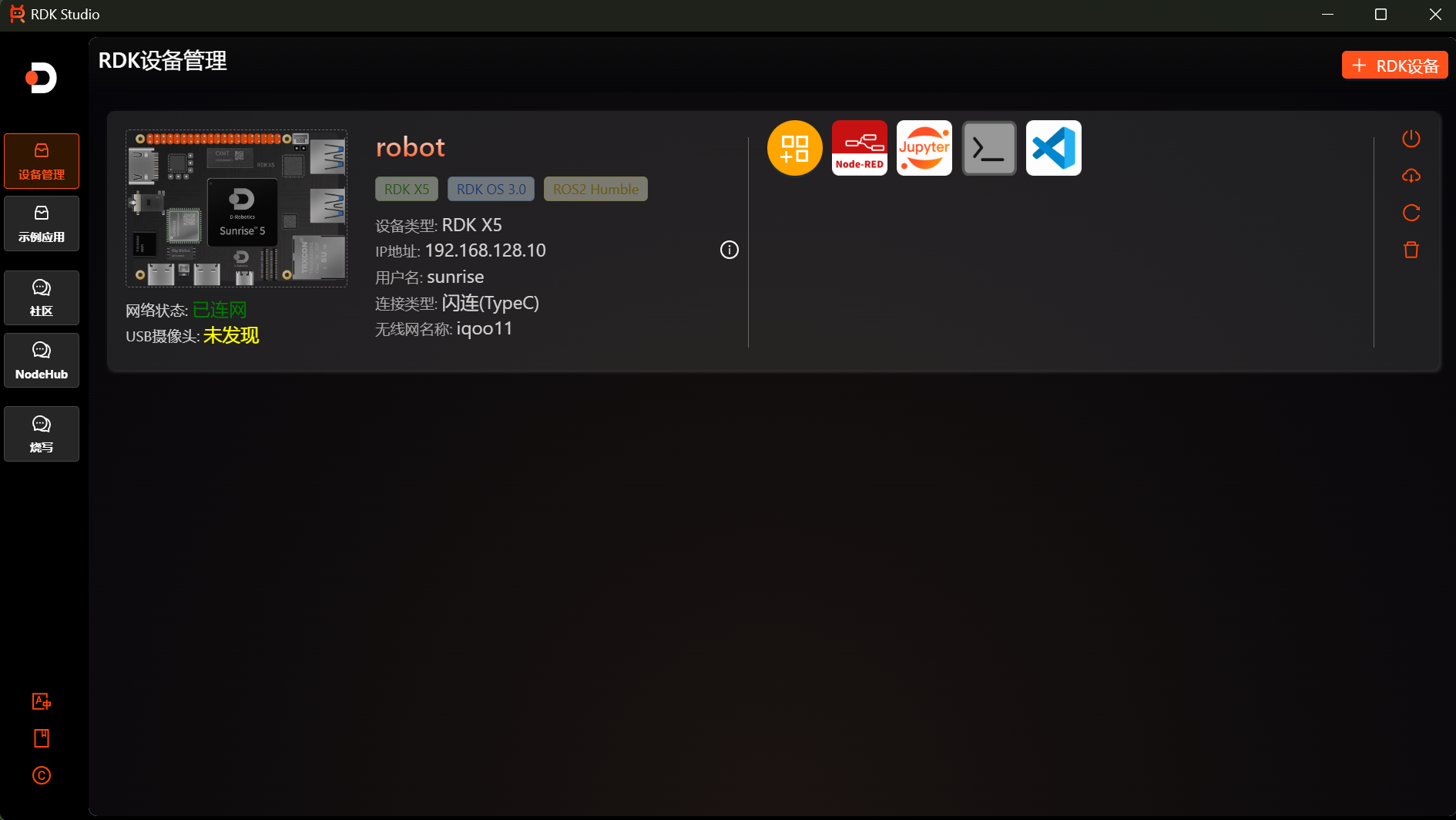
1、应用介绍
RDK X5进行闪连后,可直接打开相关功能性应用。如VS code、终端、文件管理器、Node-RED。
文件管理器:可以直接将电脑端的文件拖拉到文件管理器,存储到RDK X5中。
VS code:有本地版和web版,建议使用本地版更加稳定,卡顿情况更少。
终端:打开后可直接使用指令对RDK X5进行操作,默认权限与“添加设备”时“选择用户”有关。
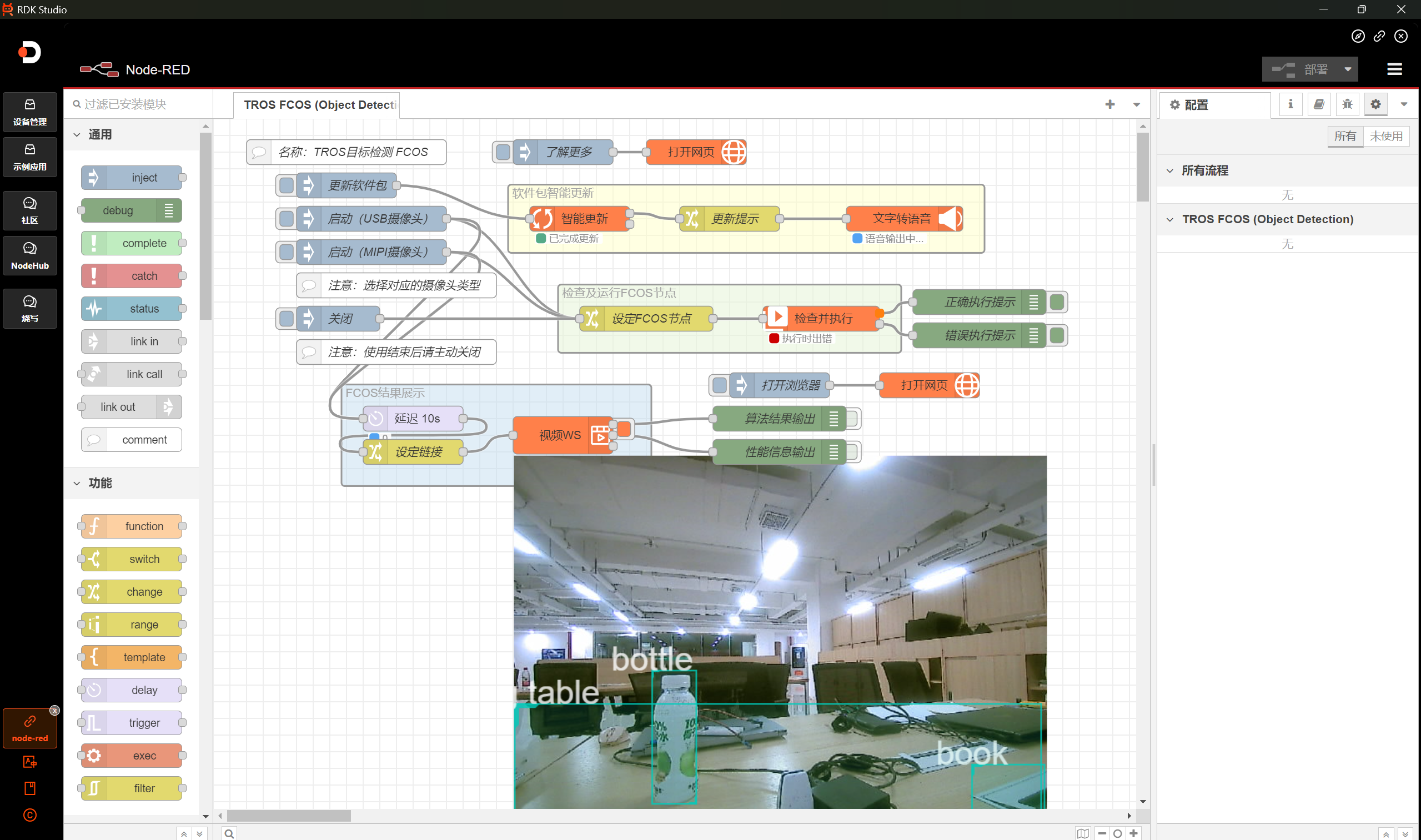
Node-RED:在RDK Studio使用Node-RED的创新性很高,能够直观的查看程序,简化复杂的逻辑和流程。
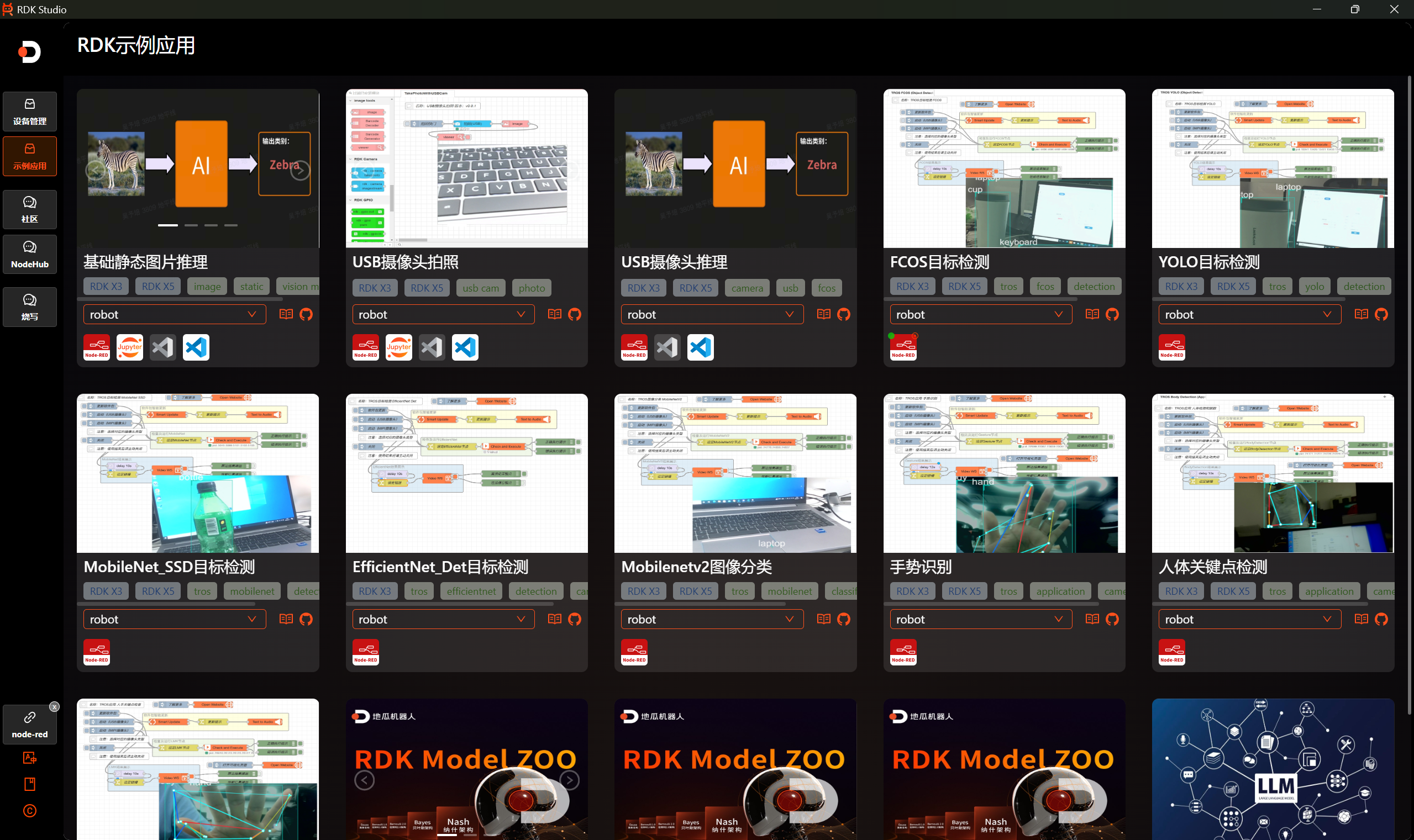
2、示例引用
RDK示例应用中有许多应用是以Node-RED为基础,可直观查看程序运行,操作十分方便。
三、NodeHub
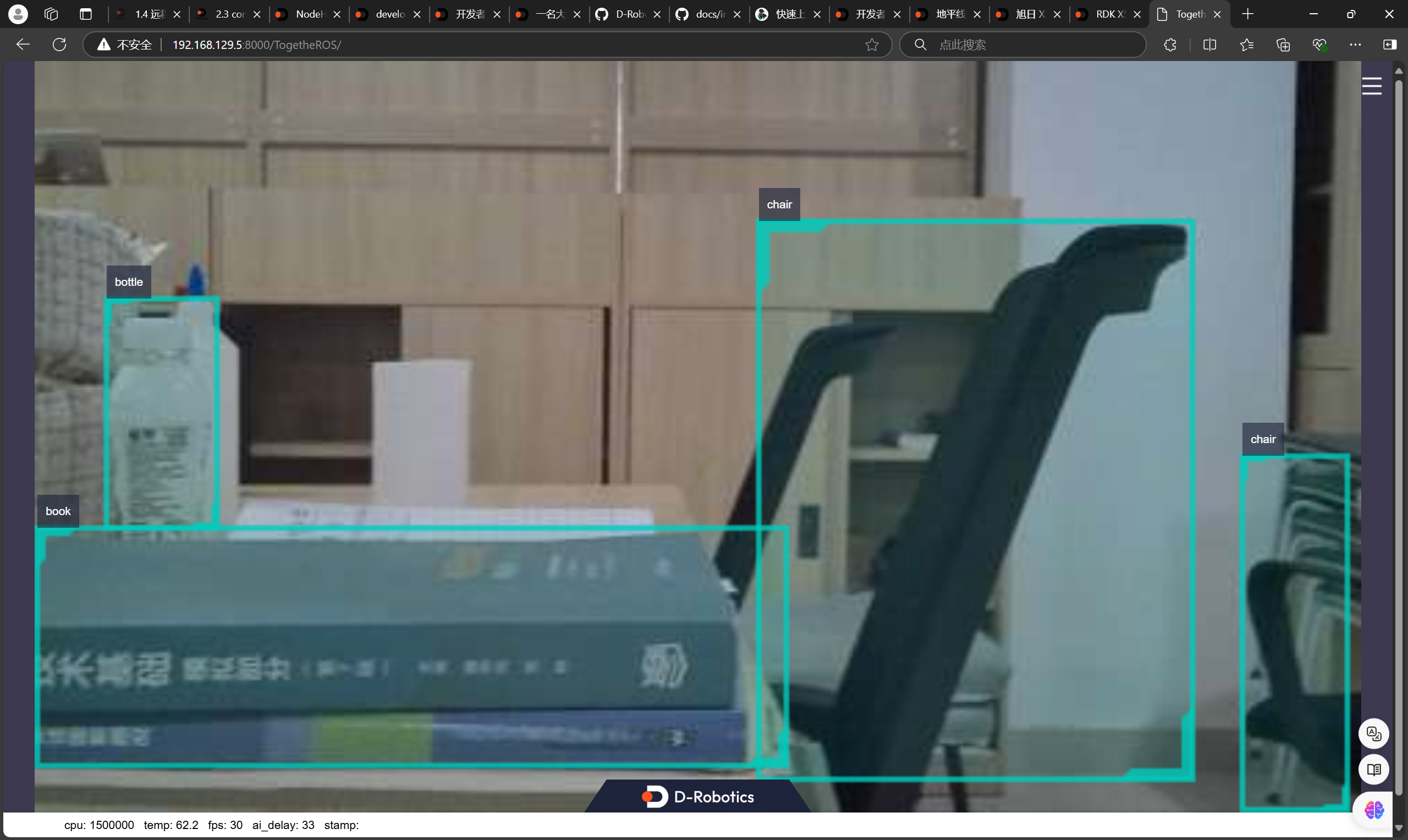
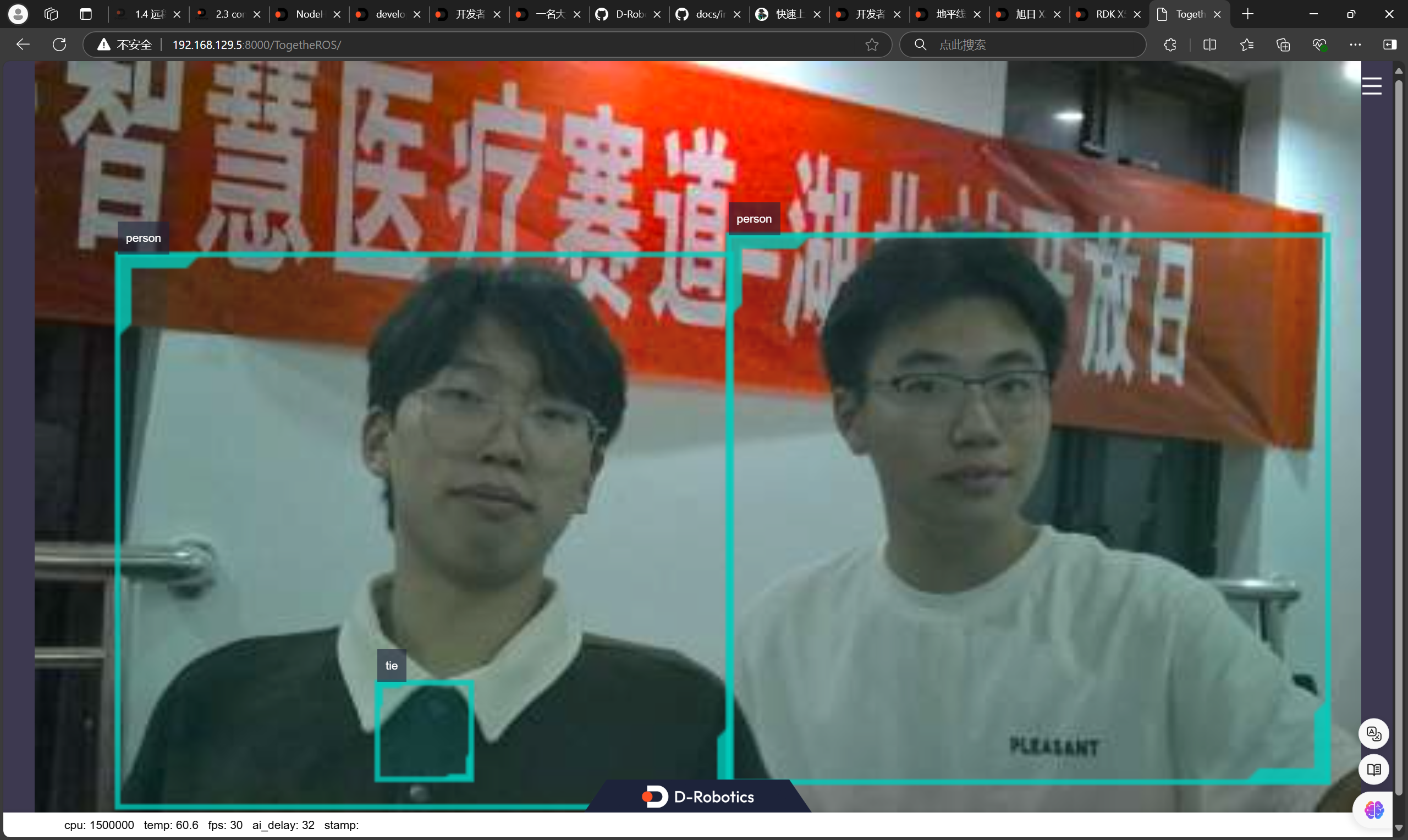
NodeHub为机器人爱好者打造的智能机器人应用中心,旨在以更加简单、高效、开放的方式协助机器人爱好者开发自己的智能机器人。有许多开发项目可在RDK X5中轻松部署,小编选取了YOLOv8 目标检测与火山引擎大模型网关两个项目进行测评。综合使用后实际感受如下:该平台中的项目完整性很高,按照使用介绍都可以完成部署,在代码仓库也可以对作品进行学习。做到了平台所打造的简单、高效、开发。小编建议可以普及相关的项目原理,让开发者不单单局限于使用这些已完备的模型,可以开发自己所需要的模型,增加NodeHub相关项目。

YOLOv8 目标检测
相关链接:https://developer.d-robotics.cc/nodehubdetail/1835245794550390786
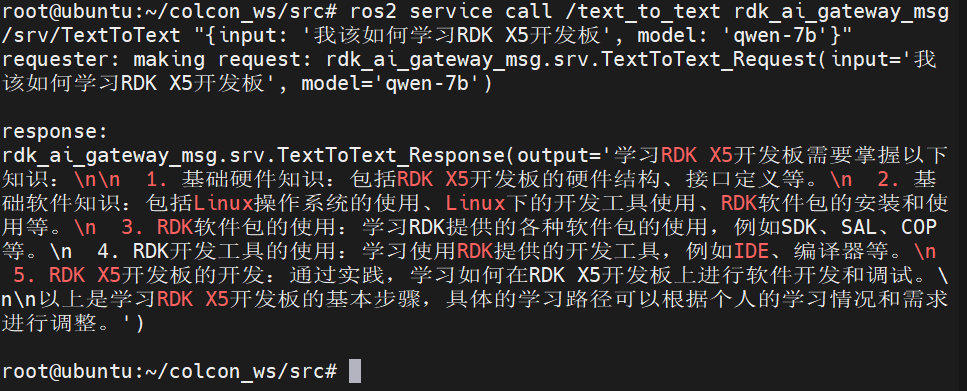
火山引擎大模型网关
相关链接:https://developer.d-robotics.cc/nodehubdetail/1831253404334641154
四、ModelZoo
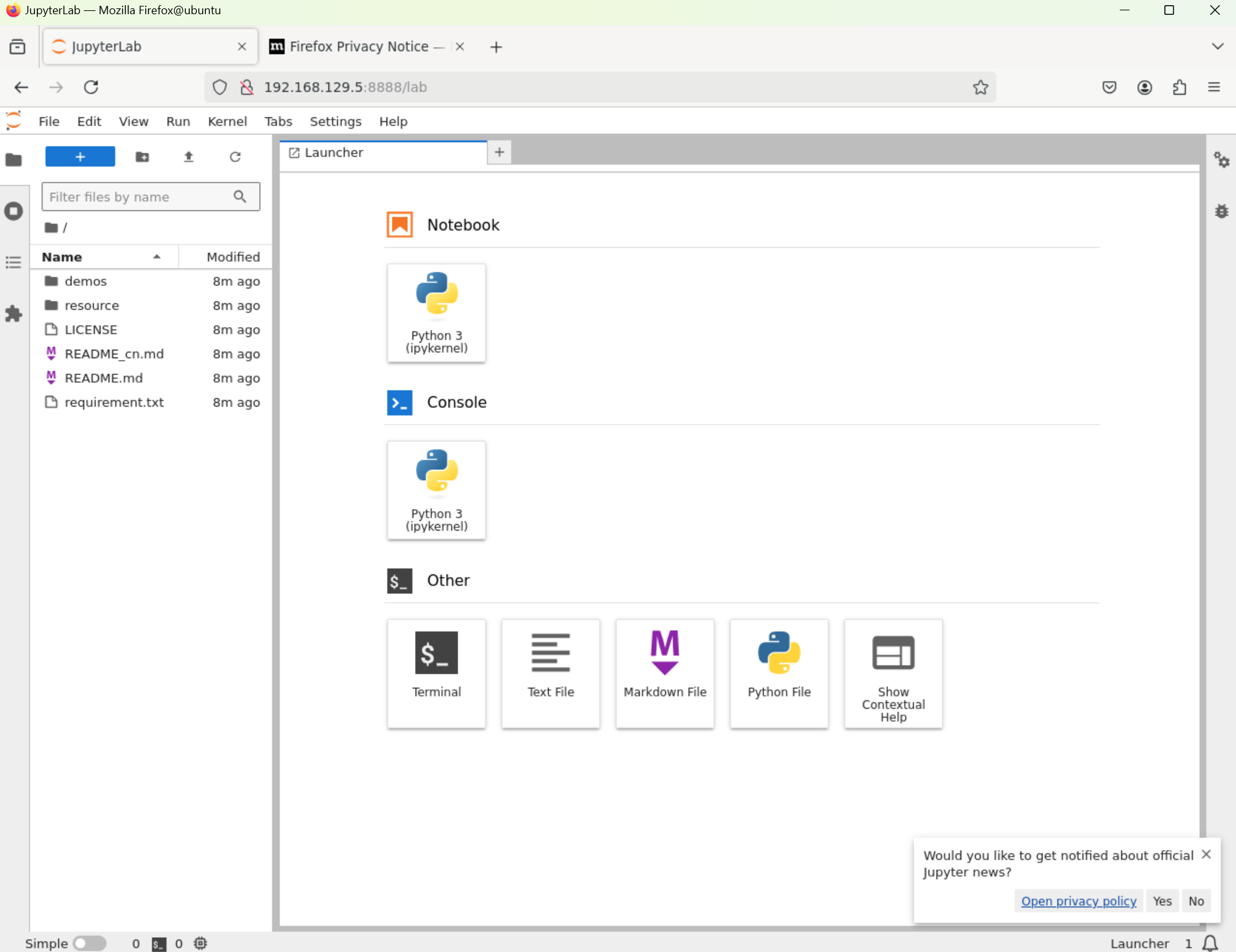
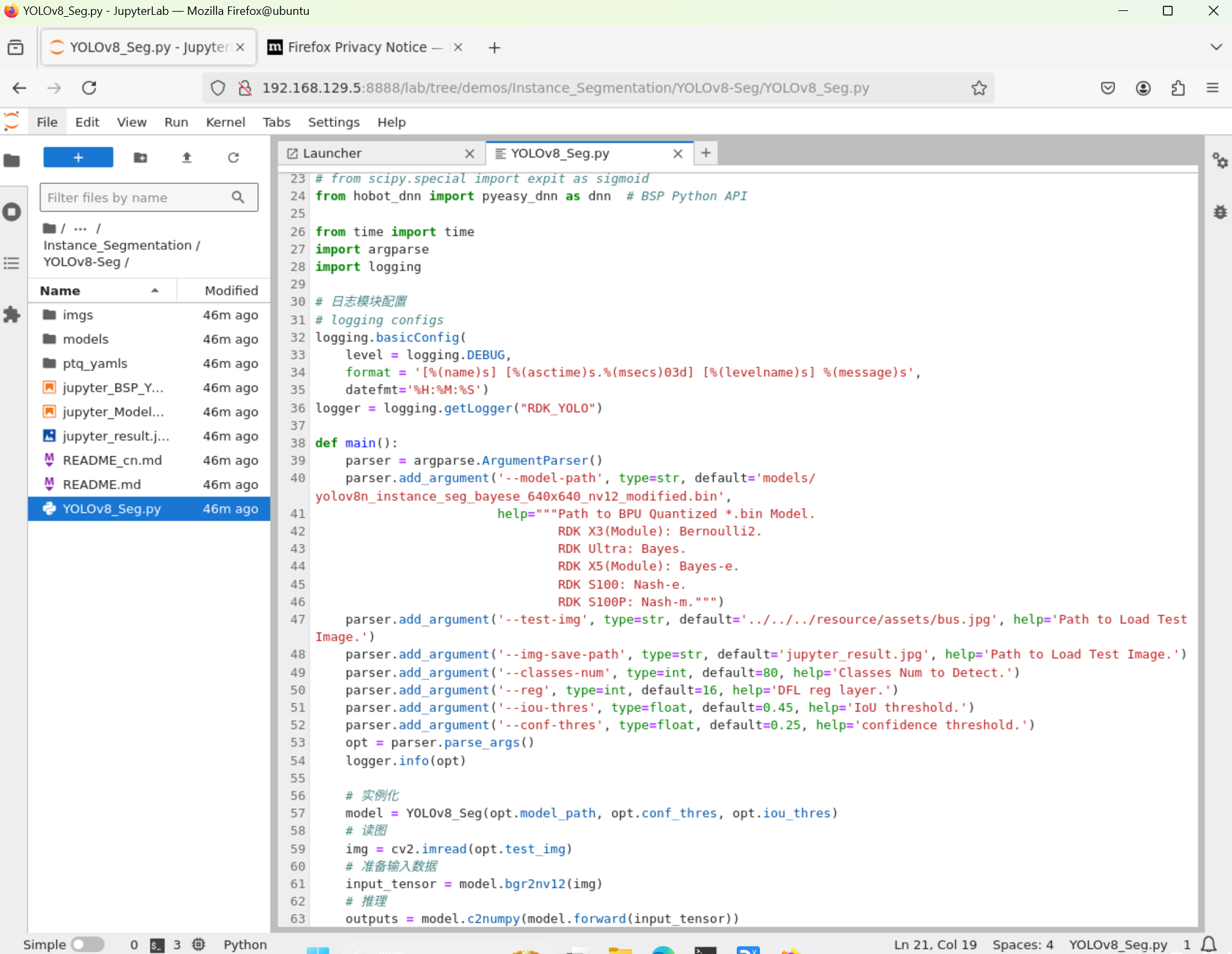
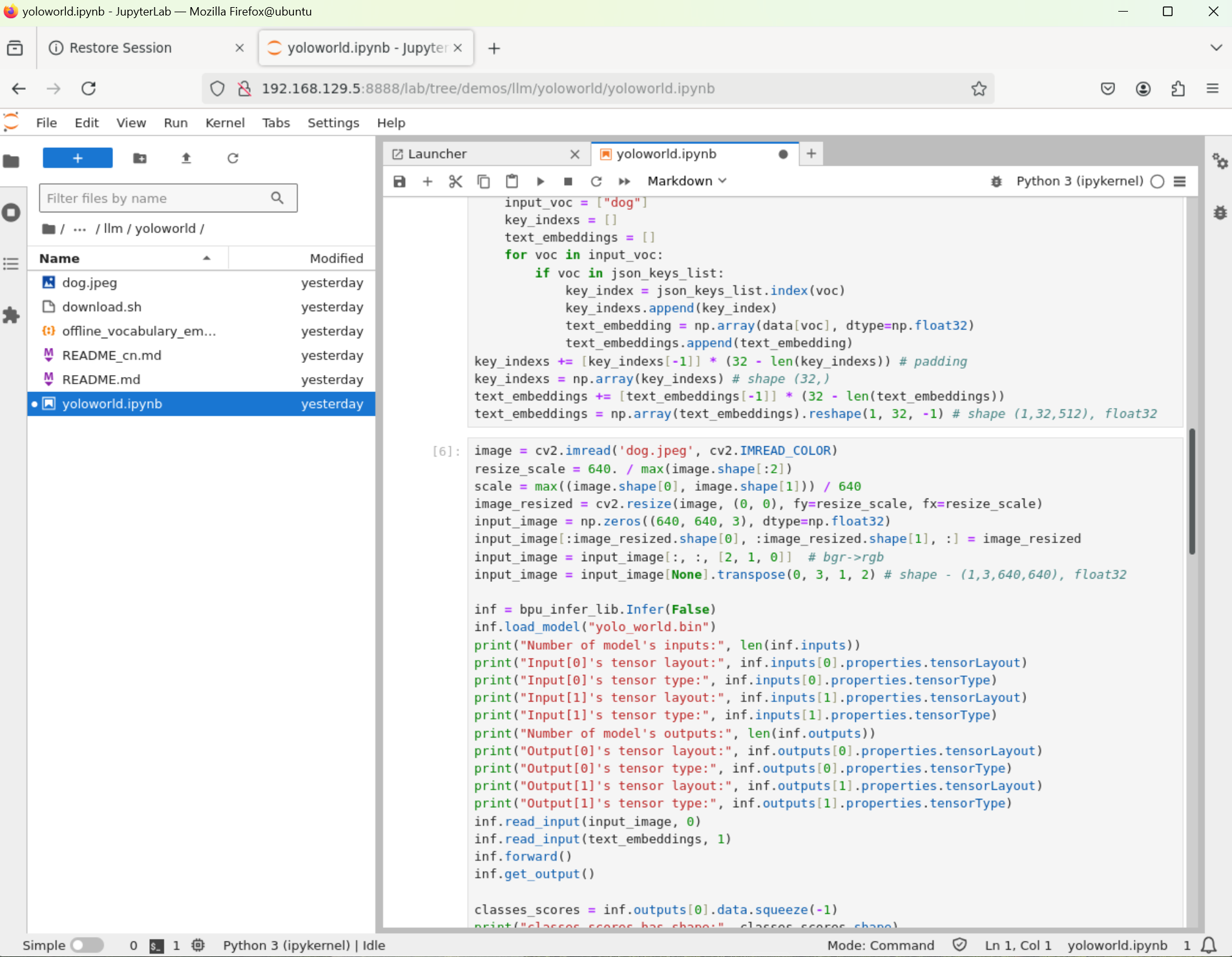
RDK Model Zoo 基于RDK开发, 提供大多数主流算法的部署例程. 例程包含导出D-Robotics *.bin模型, 使用 Python 等 API 推理 D-Robotics *.bin模型的流程. 部分模型还包括数据采集, 模型训练, 导出, 转化, 部署流程。ModelZoo为开发者提供了丰富的源代码和相关模型。
编者使用了yolov8模型用于目标检查和大模型案例。在使用过程中,我使用了 Jupyter 体验RDK Model Zoo (推荐方法),但在这个方法中,以MobaXterm输入指令为例,会打开网页版的Jupyter,这个版本的Jupyter使用体验一般,操作起来有一点延迟、响应速度较慢。
总结
整体而言,RDK X5以其出色的设计、强大的性能和多种开发支持工具,在智能机器人开发领域展现了巨大的潜力。RDK Studio的闪连功能不断完善,NodeHub的项目不断的增多,随着RDK Studio和NodeHub的结合使用,开发者能够更高效地实现他们的智能机器人项目。ModelZoo为各位开发者提供了丰富的源代码仓库与学习空间。共同体现了RDK X5创新性与实用性。
各位开发者,一起参与RDK X5开发,一起“闪连一下”!

















 4308
4308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









