







原文档:RDK X5部署YOLO算法教程(面向小白) --RDK X5 第一期地瓜创客孵化营总结
一.项目介绍
1.项目论述
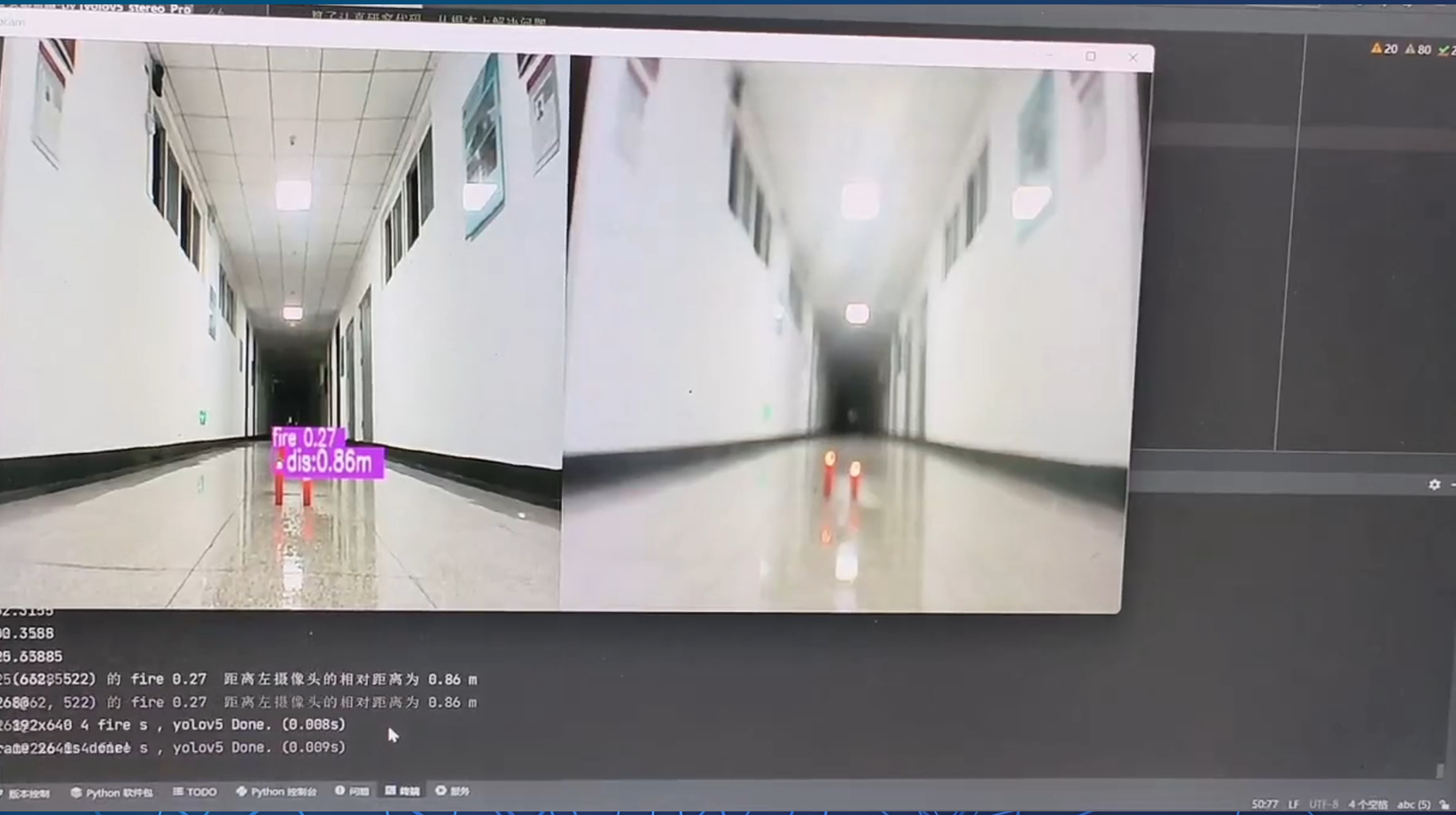
项目名称为“火眼金睛”智能消防机器人,利用双目摄像头同时结合双目测距算法以及目标识别算法对火源(用蜡烛火苗代替)进行识别并测定出机器人距离火源的距离,操纵水炮进行灭火。
2.硬件介绍
1)底盘
采用履带式底盘(自制),由两个MG540直流电机进行驱动,并带有悬架,具有良好的通过性能。

2)下位机
下位机采用STM32F407作为主控,用于与上位机通信,同时控制底盘运行与水炮的运动
3)上位机
上位机采用地瓜机器人 RDKX5
4)其他硬件
双目摄像头

水泵 12V大功率电池 储水箱等
3.项目进展以及现状
目前项目已完成底盘设计制作 硬件电路设计制作 目标识别与双目测距算法融合,以及RDK X5部署,将视觉识别效果与底盘控制结合部分还未完成,由于实验室老师安排项目比较多,该项目将会暂时搁置一段时间,去开发其他项目。
效果展示:

二.如何在RDK X5上部署yolov5算法(面向小白)
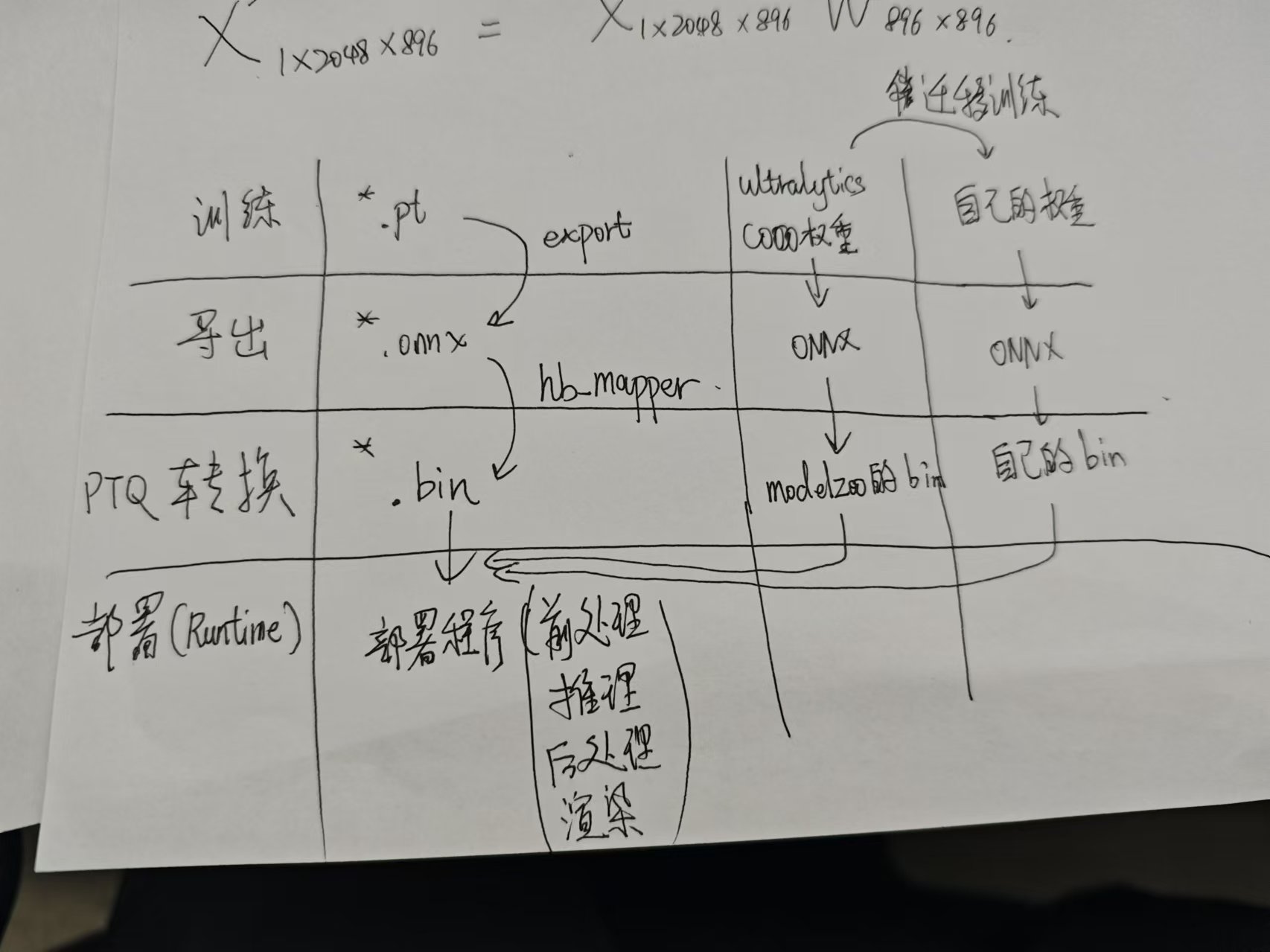
本人是一个新手小白,我会会我在部署过程中的参考资料放在下面以及说明需要注意的事项,帮助各位了解部署流程,快速上手,刚接触入门不必搞懂其中的原理。根据流程能够一步步走下来,会使用就行。
本人能力有限,同时避免重复造轮子,我将参考他人的教程就进行讲解,结合他人的教程以及我的注释,会避免很多的坑。
1. 安装WSL2系统
安装WSL2最好的教程就是参考Microsoft官方教程
官方网站:#### 安装 WSL | Microsoft Learn
安装是需要注意自己的C盘剩余的存大小
2. 安装UBUNTU
安装完WSL2后在Microsoft store 找到ubuntu22.04并进行安装,(OE工具链要求Ubuntu20.04),但Ubuntu22.04也可以运行OE工具链,安装22.04版本即可,对新手小白来说,22.04版本也可以用来学习ROS2,目前主流的ROS2教学主要是基于UBUNTU22.04系统 例如鱼香ROS 古月句ROS2入门21讲 猛狮训练营赵虚左老师的ROS2可成等等。
建议在VSCODE上使用WSL2:开始通过 WSL 使用 VS Code | Microsoft Learn
安装完Ubuntu22.04之后不要急着开始,转换Ubuntu文件位置(节省C盘空间)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4173
4173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









