






摘要
本文提出了一种基于含有遗忘因子的最小二乘算法的在线辨识方法,用于永磁同步电机(PMSM)转动惯量和阻尼系数的辨识。通过在控制系统中引入遗忘因子,增强了算法对实时变化的响应能力。仿真结果验证了所提方法的有效性与精度。
理论
-
永磁同步电机数学模型 永磁同步电机(PMSM)的动态数学模型可描述为:

其中:
-
𝐽为转动惯量
-
𝜔为角速度
-
𝑇𝑒 为电磁转矩
-
𝑇𝑙为负载转矩
-
𝐵为阻尼系数
2. 最小二乘算法 最小二乘法通过最小化误差平方和来估计模型参数,基本更新公式为:
![]()
其中:
-
𝐾 ( 𝑘 ) 为增益矩阵
-
𝜙 ( 𝑘 ) 为回归矩阵
-
𝑦 ( 𝑘 ) 为系统输出
3. 引入遗忘因子
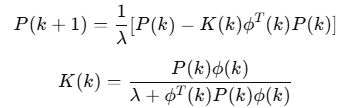
为了增强算法对动态变化的跟踪能力,引入遗忘因子𝜆 ,更新公式为:
实验结果
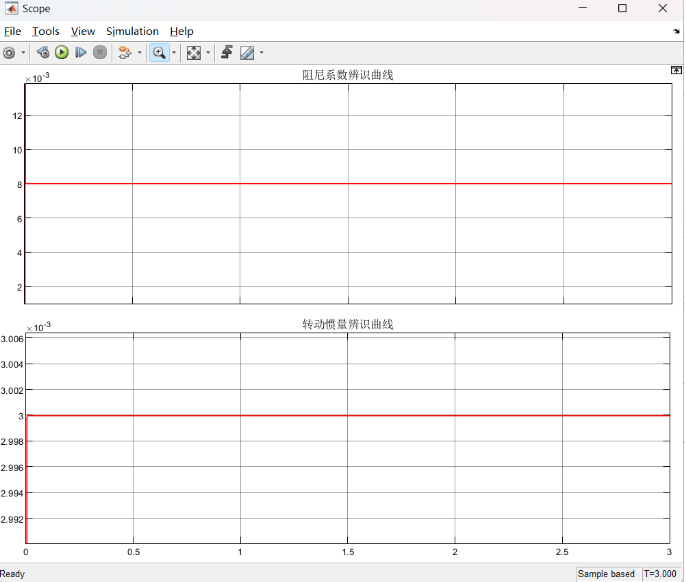
1. 参数辨识曲线
图1显示了转动惯量𝐽和阻尼系数 𝐵的在线辨识结果,辨识值逐渐趋于稳定。
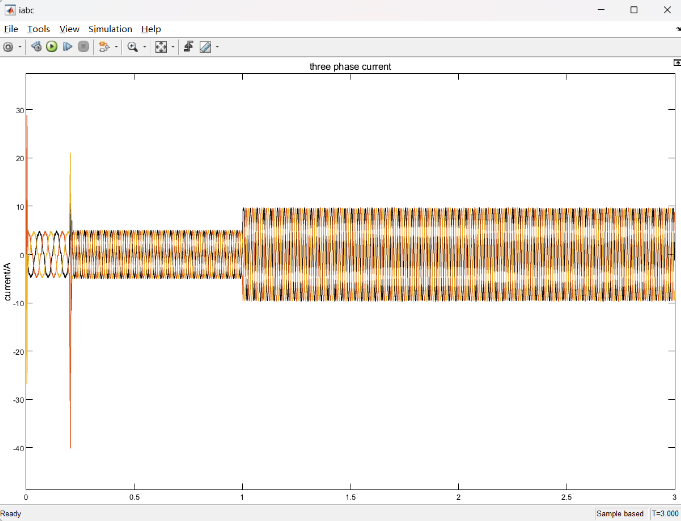
2. 电机电流波形
图2展示了三相电流波形,控制系统能够在较短时间内达到稳态,表明辨识方法对控制精度的改善。
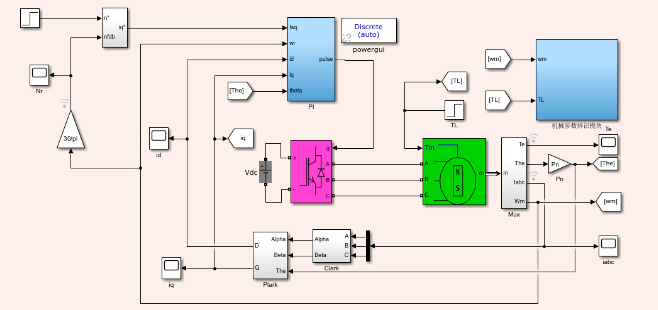
3. 系统框图
图3为永磁同步电机控制系统的Simulink框图,展示了整个辨识与控制过程。
部分代码
% PMSM参数辨识最小二乘算法
lambda = 0.98; % 遗忘因子
P = eye(2); % 初始协方差矩阵
theta = [0; 0]; % 参数初值 [J; B]
for k = 1:length(data)
phi = [current_data(k); velocity_data(k)];
y = torque_data(k);
K = P * phi / (lambda + phi' * P * phi);
theta = theta + K * (y - phi' * theta);
P = (P - K * phi' * P) / lambda;
J_est(k) = theta(1);
B_est(k) = theta(2);
end
% 结果绘图
plot(time, J_est, 'r', time, B_est, 'b');
xlabel('Time (s)');
ylabel('Parameters');
legend('J (Inertia)', 'B (Damping)');
参考文献
❝
Ljung, L. (1999). System Identification: Theory for the User. Prentice Hall.
Chen, H., & Zhang, J. (2015). Online Parameter Estimation for PMSM Using Recursive Least Squares Algorithm. IEEE Transactions on Energy Conversion.
Zhao, S., & Li, X. (2020). Adaptive Control of PMSM with Online Parameter Identification. IEEE Transactions on Industrial Electronics.
(文章内容仅供参考,具体效果以图片为准)

















 1192
1192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









