









网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

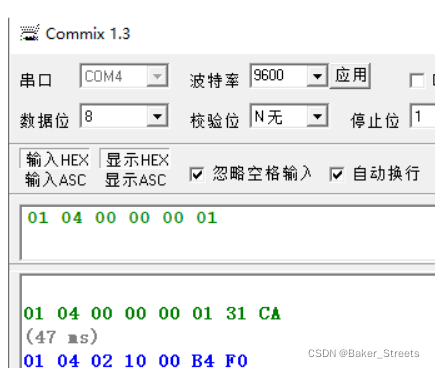
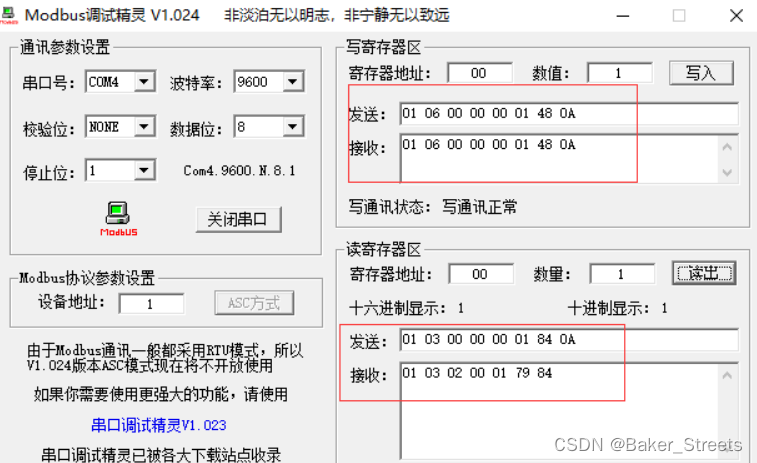
三、modbus
main.c:
int main(void)
{
unsigned char i;
/\* Initialize STM32F103 \*/
System\_Initialization();//系统配置
SysTick\_Init();//启动系统滴答定时器 SysTick
/\* Config W5500 \*/
W5500\_Configuration();//W5500配置
Delay\_ms(200);//延时等待
/\* Modbus-TCP Init \*/
eMBTCPInit(MB_TCP_PORT_USE_DEFAULT); //端口依赖事件模块初始化
Delay\_ms(200); //延时等待
/\* Enable Modbus-TCP Stack \*/
eMBEnable();//激活协议栈
printf("\r\nModbus-TCP Start!\r\n");
printf("IP:192.168.1.190\r\n");
while(1)
{
i=Read\_SOCK\_1\_Byte(0,Sn_SR); //读W5500状态
if(i==0)
{
do
{
Delay\_ms(100);//延时等待
}while(Socket\_Listen(0)==FALSE);//设置“Socket n”为“TCP服务器模式”
}
else if(i==SOCK_ESTABLISHED) //建立TCP连接
{
eMBPoll();//启动modbus侦听
BSP\_LED();//线圈控制LED灯
}
}
}
w5500参数配置:
/\* W5500 configuration \*/
void W5500\_Configuration()
{
unsigned char array[6];
GPIO\_SetBits(GPIO_W5500_RST_PORT, GPIO_W5500_RST_Pin);//上拉
Delay\_ms(100); /\*delay 100ms 使用systick 1ms时基的延时\*/
//等待以太网链路
while((Read\_1\_Byte(PHYCFGR)&LINK)==0); /\* Waiting for Ethernet Link \*/
Write\_1\_Byte(MR, RST);//写入W5500普通寄存器一个字节
Delay\_ms(20); /\*delay 20ms \*/
/\* Set Gateway IP as: 192.168.1.1 \*/
array[0]=192;
array[1]=168;
array[2]=1;
array[3]=1;
Write\_Bytes(GAR, array, 4);//设置网关IP
/\* Set Subnet Mask as: 255.255.255.0 \*/
array[0]=255;
array[1]=255;
array[2]=255;
array[3]=0;
Write\_Bytes(SUBR, array, 4);//设置子网掩码
/\* Set MAC Address as: 0x48,0x53,0x00,0x57,0x55,0x00 \*/
array[0]=0x48;
array[1]=0x53;
array[2]=0x00;
array[3]=0x57;
array[4]=0x55;
array[5]=0x00;
Write\_Bytes(SHAR, array, 6);//设置MAC地址
/\* Set W5500 IP as: 192.168.1.128 \*/
array[0]=192;
array[1]=168;
array[2]=1;
array[3]=190;
Write\_Bytes(SIPR, array, 4);//设置W5500的IP地址
}
运行结果:
四、实现web服务
void SPI1\_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC\_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1 | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO\_Init(GPIOA, &GPIO_InitStructure);
GPIO\_SetBits(GPIOA,GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;//
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI\_Init(SPI1, &SPI_InitStructure);
SPI\_Cmd(SPI1, ENABLE); //ʹÄÜSPIÍâÉè
}
void SPI1\_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert\_param(IS\_SPI\_BAUDRATE\_PRESCALER(SPI_BaudRatePrescaler));
SPI1->CR1&=0XFFC7;
SPI1->CR1|=SPI_BaudRatePrescaler;
SPI\_Cmd(SPI1,ENABLE);
}
w5500参数:
#ifdef \_\_DEF\_IINCHIP\_PPP\_\_
#include "md5.h"
#endif
static uint8 I_STATUS[MAX_SOCK_NUM];
static uint16 SSIZE[MAX_SOCK_NUM]; /\*\*< Max Tx buffer size by each channel \*/
static uint16 RSIZE[MAX_SOCK_NUM]; /\*\*< Max Rx buffer size by each channel \*/
uint8 getISR(uint8 s)
{
return I_STATUS[s];
}
void putISR(uint8 s, uint8 val)
{
I_STATUS[s] = val;
}
uint16 getIINCHIP\_RxMAX(uint8 s)
{
return RSIZE[s];
}
uint16 getIINCHIP\_TxMAX(uint8 s)
{
return SSIZE[s];
}
void IINCHIP\_CSoff(void)
{
WIZ\_CS(LOW);
}
void IINCHIP\_CSon(void)
{
WIZ\_CS(HIGH);
}
u8 IINCHIP\_SpiSendData(uint8 dat)
{
return(SPI2\_SendByte(dat));
}
void IINCHIP\_WRITE( uint32 addrbsb, uint8 data)
{
IINCHIP\_ISR\_DISABLE(); // Interrupt Service Routine Disable
IINCHIP\_CSoff(); // CS=0, SPI start
IINCHIP\_SpiSendData( (addrbsb & 0x00FF0000)>>16);// Address byte 1
IINCHIP\_SpiSendData( (addrbsb & 0x0000FF00)>> 8);// Address byte 2
IINCHIP\_SpiSendData( (addrbsb & 0x000000F8) + 4); // Data write command and Write data length 1
IINCHIP\_SpiSendData(data); // Data write (write 1byte data)
IINCHIP\_CSon(); // CS=1, SPI end
IINCHIP\_ISR\_ENABLE(); // Interrupt Service Routine Enable
}
uint8 IINCHIP\_READ(uint32 addrbsb)
{
uint8 data = 0;
IINCHIP\_ISR\_DISABLE(); // Interrupt Service Routine Disable
IINCHIP\_CSoff(); // CS=0, SPI start
IINCHIP\_SpiSendData( (addrbsb & 0x00FF0000)>>16);// Address byte 1
IINCHIP\_SpiSendData( (addrbsb & 0x0000FF00)>> 8);// Address byte 2
IINCHIP\_SpiSendData( (addrbsb & 0x000000F8)) ;// Data read command and Read data length 1
data = IINCHIP\_SpiSendData(0x00); // Data read (read 1byte data)
IINCHIP\_CSon(); // CS=1, SPI end
IINCHIP\_ISR\_ENABLE(); // Interrupt Service Routine Enable
return data;
}
uint16 wiz\_write\_buf(uint32 addrbsb,uint8\* buf,uint16 len)
{
uint16 idx = 0;
if(len == 0) printf("Unexpected2 length 0\r\n");
IINCHIP\_ISR\_DISABLE();
IINCHIP\_CSoff(); // CS=0, SPI start
IINCHIP\_SpiSendData( (addrbsb & 0x00FF0000)>>16);// Address byte 1
IINCHIP\_SpiSendData( (addrbsb & 0x0000FF00)>> 8);// Address byte 2
IINCHIP\_SpiSendData( (addrbsb & 0x000000F8) + 4); // Data write command and Write data length 1
for(idx = 0; idx < len; idx++) // Write data in loop
{
IINCHIP\_SpiSendData(buf[idx]);
}
IINCHIP\_CSon(); // CS=1, SPI end
IINCHIP\_ISR\_ENABLE(); // Interrupt Service Routine Enable
return len;
}
uint16 wiz\_read\_buf(uint32 addrbsb, uint8\* buf,uint16 len)
{
uint16 idx = 0;
if(len == 0)
{
printf("Unexpected2 length 0\r\n");
}
IINCHIP\_ISR\_DISABLE();
//SPI MODE I/F
IINCHIP\_CSoff(); // CS=0, SPI start
IINCHIP\_SpiSendData( (addrbsb & 0x00FF0000)>>16);// Address byte 1
IINCHIP\_SpiSendData( (addrbsb & 0x0000FF00)>> 8);// Address byte 2
IINCHIP\_SpiSendData( (addrbsb & 0x000000F8)); // Data write command and Write data length 1
for(idx = 0; idx < len; idx++) // Write data in loop
{
buf[idx] = IINCHIP\_SpiSendData(0x00);
}
IINCHIP\_CSon(); // CS=1, SPI end
IINCHIP\_ISR\_ENABLE(); // Interrupt Service Routine Enable
return len;
}
http请求:
void do\_http(void)
{
uint8 ch=SOCK_HTTP;
uint16 len;
st_http_request \*http_request;
memset(rx_buf,0x00,MAX_URI_SIZE);
http_request = (st_http_request\*)rx_buf; // struct of http request
/\* http service start \*/
switch(getSn\_SR(ch))
{
case SOCK_INIT:
listen(ch);
break;
case SOCK_LISTEN:
break;
case SOCK_ESTABLISHED:
//case SOCK\_CLOSE\_WAIT:
if(getSn\_IR(ch) & Sn_IR_CON)
{
setSn\_IR(ch, Sn_IR_CON);
}
if ((len = getSn\_RX\_RSR(ch)) > 0)
{
len = recv(ch, (uint8\*)http_request, len);
\*(((uint8\*)http_request)+len) = 0;
proc\_http(ch, (uint8\*)http_request); // request is processed
disconnect(ch);
}
break;
case SOCK_CLOSE_WAIT:
if ((len = getSn\_RX\_RSR(ch)) > 0)
{
//printf("close wait: %d\r\n",len);
len = recv(ch, (uint8\*)http_request, len);
\*(((uint8\*)http_request)+len) = 0;
proc\_http(ch, (uint8\*)http_request); // request is processed
}
disconnect(ch);
break;
case SOCK_CLOSED:
socket(ch, Sn_MR_TCP, 80, 0x00); /\* reinitialize the socket \*/
break;
default:
break;
}// end of switch
}
void JTXD\_do\_http(void)
{
uint8 ch=SOCK_HTTP;
uint16 len;


**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化的资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618636735)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
)
{
uint8 ch=SOCK_HTTP;
uint16 len;
[外链图片转存中...(img-XgTwlgXl-1715728144259)]
[外链图片转存中...(img-En3usEKB-1715728144260)]
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化的资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618636735)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**















 4556
4556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









