








网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
(1)Hough Line Transform用来做直线检测
(2)前提条件 – 边缘检测已经完成 (cv::Canny,输入的是8位的图像可以是单通道或多通道,输出的是8位单通道的灰度图像,再通过threshold转化为二值化图像)
(3)平面空间到极坐标空间转换
极坐标也就是霍夫空间的坐标。

2、霍夫直线变换的例子
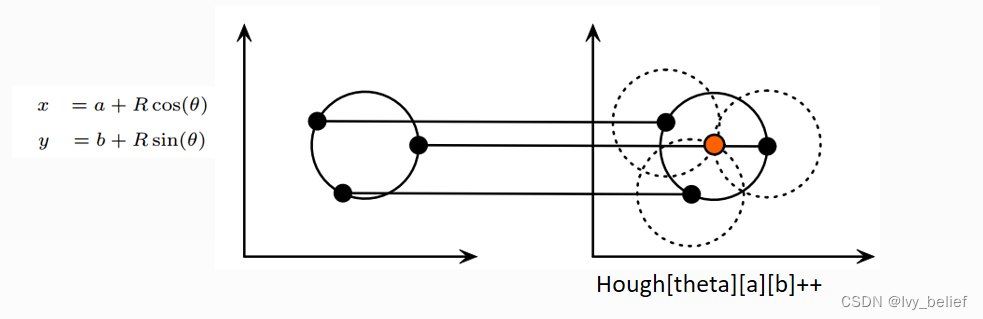
(1)对于任意一条直线上的所有点来说
(2)变换到极坐标中,从[0~360]空间,可以得到r的大小
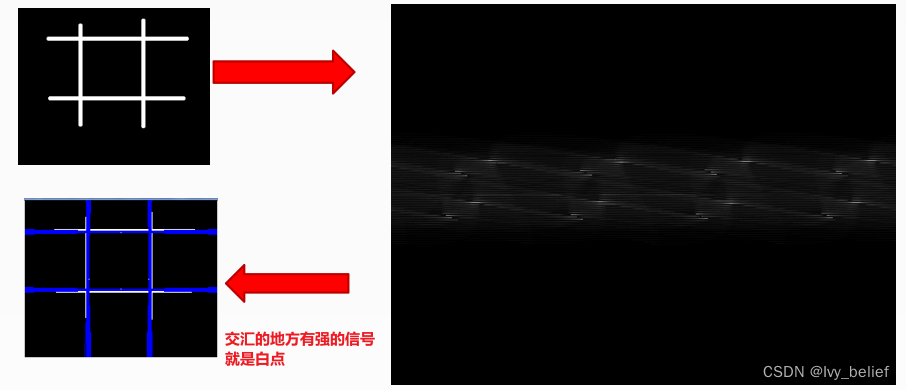
(3)属于同一条直线上点在极坐标空(r, theta)必然在一个点上有最强的信号出现,根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线
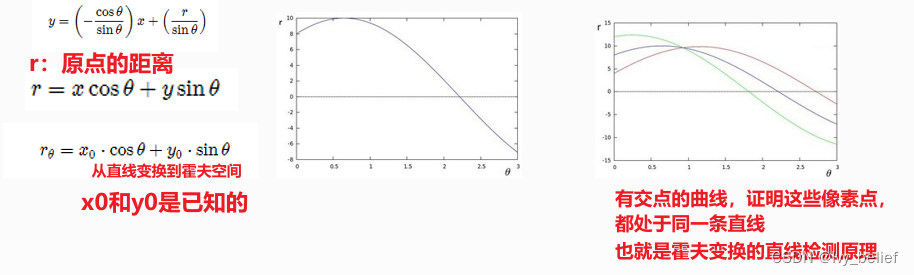
(4)从平面坐标变换到霍夫空间(极坐标)
3、相关API学习(代码例子)
(1)标准的霍夫变换 cv::HoughLines从平面坐标转换到霍夫空间,最终输出是极坐标空间;表示形式为: 。
。
cv::HoughLines(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180
int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
double srn=0;// 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double stn=0;//是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换
double min_theta=0; // 表示角度扫描范围 0 ~180之间, 默认即可
double max_theta=CV_PI
) // 一般情况是有经验的开发者使用,需要自己反变换到平面空间(少用)
(2)霍夫变换直线概率 cv::HoughLinesP最终输出是直线的两个点**(常用)**
cv::HoughLinesP(
InputArray src, // 输入图像,必须8-bit的灰度图像
OutputArray lines, // 输出的极坐标来表示直线
double rho, // 生成极坐标时候的像素扫描步长
double theta, //生成极坐标时候的角度步长,一般取值
CV_PI/180 int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线
double minLineLength=0;// 最小直线长度
double maxLineGap=0;// 最大间隔
)
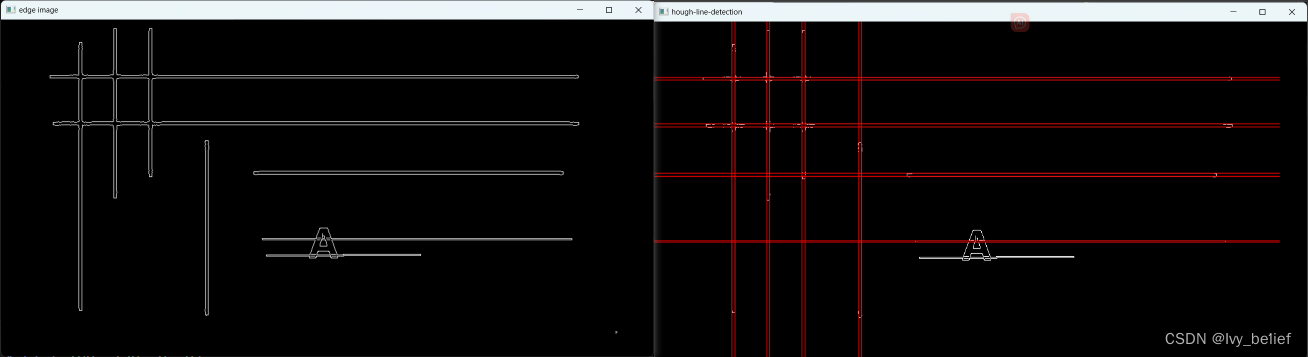
(3)检测结果
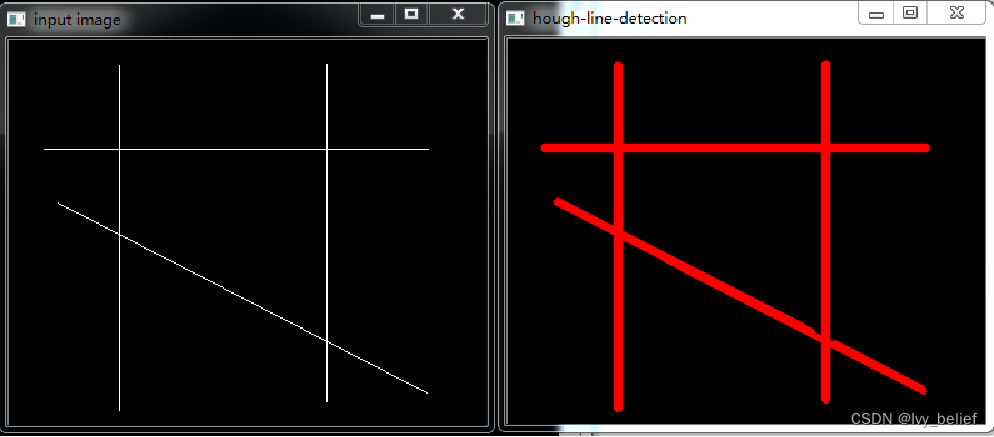
(4)代码演示:
#include<opencv2\opencv.hpp>
#include<iostream>
#include <math.h>
using namespace cv;
using namespace std;
// Hough Line霍夫直线检测
int main(int argc, char** argv) {
Mat src, src_gray, dst;
src = imread("line.jpg");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
char INPUT_TITLE[] = "input image";
char OUTPUT_TITLE[] = "hough-line-detection";
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
// extract edge
Canny(src, src_gray, 150, 200);
cvtColor(src_gray, dst, CV_GRAY2BGR);
imshow("edge image", src_gray);
vector<Vec2f> lines;
HoughLines(src_gray, lines, 1, CV_PI / 180, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0]; // 极坐标中的r长度
float theta = lines[i][1]; // 极坐标中的角度
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
// 转换为平面坐标的四个点
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(dst, pt1, pt2, Scalar(0, 0, 255), 1, CV_AA);
}
/*
vector<Vec4f> plines;
HoughLinesP(src_gray, plines, 1, CV_PI / 180.0, 10, 0, 10);
Scalar color = Scalar(0, 0, 255);
for (size_t i = 0; i < plines.size(); i++) {
Vec4f hline = plines[i];
line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3, LINE_AA);
}*/
imshow(OUTPUT_TITLE, dst);
waitKey(0);
return 0;
}
效果展示:
三、霍夫变换—圆检测
1、霍夫圆检测原理
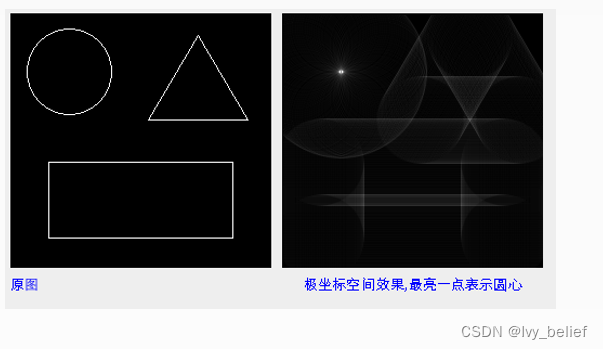
(1)从平面坐标到极坐标转换三个参数
(2)假设平面坐标的任意一个圆上的点,转换到极坐标中: 处有最大值,霍夫变换正是利用这个原理实现圆的检测。
处有最大值,霍夫变换正是利用这个原理实现圆的检测。
2、相关API学习(代码例子)
(1)cv::HoughCircles
因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波。
基于效率考虑,Opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
1)检测边缘,发现可能的圆心
2)基于第一步的基础上从候选圆心开始计算最佳半径大小
HoughCircles(
InputArray image, // 输入图像 ,必须是8位的单通道灰度图像
OutputArray circles, // 输出结果,发现的圆信息
Int method, // 方法 - HOUGH_GRADIENT
Double dp, // dp = 1;
Double mindist, // 10 最短距离-可以分辨是两个圆的,否则认为是同心圆- src_gray.rows/8 Double param1, // canny edge detection low threshold
Double param2, // 中心点累加器阈值 – 候选圆心
Int minradius, // 最小半径 Int maxradius//最大半径
)
(2)代码演示:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src, dst;
src = imread("circle.jpg");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
char INPUT_TITLE[] = "input image";
char OUTPUT_TITLE[] = "hough circle demo";
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
// 中值滤波
Mat moutput;
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上C C++开发知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618668825)**
tput;
[外链图片转存中...(img-vJJbA8FF-1715680465502)]
[外链图片转存中...(img-KMGxDGTy-1715680465502)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上C C++开发知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618668825)**















 2249
2249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









