







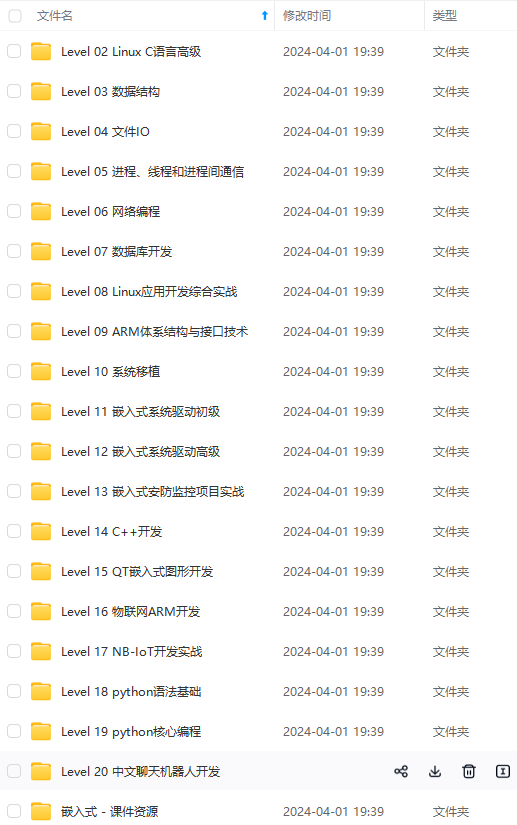

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
(5)
J = {1 \over 2}\int_0^\infty x^T(Q + K^TRK)x \space dt \tag{5}
J=21∫0∞xT(Q+KTRK)x dt(5)
2. 假设纯在一个常量矩阵
P
P
P使得,
d
d
t
(
x
T
P
x
)
=
−
x
T
(
Q
K
T
R
K
)
x
(6)
{d \over dt}(x^TPx) = - x^T(Q + K^TRK)x \tag{6}
dtd(xTPx)=−xT(Q+KTRK)x(6)
3. 把式(6)代入(5)后,有
J
=
−
1
2
∫
0
∞
d
d
t
x
T
(
P
)
x
=
1
2
x
T
(
0
)
P
x
(
0
)
(7)
J = -{1 \over 2}\int_0^\infty \frac{d}{dt}x^T§x \space = {1 \over 2}x^T(0)Px(0) \tag{7}
J=−21∫0∞dtdxT§x =21xT(0)Px(0)(7)
式(7)的意思就是,t趋近于无穷时,系统状态向量x(t)趋近于0,这样就直接结算出了积分方程。
4. 把式(6)左边微分展开,
x
˙
T
P
x
x
T
P
x
˙
x
T
Q
x
x
T
K
T
R
K
x
=
0
\dot{x}^{T}Px + x{T}P\dot{x}+xTQx+xTKTRKx = 0
x˙TPx+xTPx˙+xTQx+xTKTRKx=0
状态变量x的微分用式(3)表示,
x
T
A
c
T
P
x
x
T
P
A
c
x
x
T
Q
x
x
T
K
T
R
K
x
=
0
x{T}A{T}_cPx+x{T}PA_{c}x+xTQx+xTKTRKx = 0
xTAcTPx+xTPAcx+xTQx+xTKTRKx=0
整理后,有
x
T
(
A
c
T
P
P
A
c
Q
K
T
R
K
)
x
=
0
(8)
x{T}(A{T}_{c}P+PA_{c}+Q+K^{T}RK)x=0 \tag{8}
xT(AcTP+PAc+Q+KTRK)x=0(8)
这样,就又回到了二次型的问题,如果式(8)要有解,那么括号里面的部分必须等于0.
A
c
T
P
P
A
c
Q
K
T
R
K
=
0
(9)
A{T}_{c}P+PA_{c}+Q+K{T}RK = 0 \tag{9}
AcTP+PAc+Q+KTRK=0(9)
把
A
c
=
A
−
B
K
A_c = A-BK
Ac=A−BK代入式(9)
(
A
−
B
K
)
T
P
P
(
A
−
B
K
)
Q
K
T
R
K
=
0
(10)
(A-BK){T}P+P(A-BK)+Q+K{T}RK = 0 \tag{10}
(A−BK)TP+P(A−BK)+Q+KTRK=0(10)
A
T
P
P
A
Q
K
T
R
K
−
K
T
B
T
P
−
P
B
K
=
0
(11)
A{T}P+PA+Q+K{T}RK-K{T}B{T}P-PBK=0 \tag{11}
ATP+PA+Q+KTRK−KTBTP−PBK=0(11)
5. 式(11)还是一个关于
K
K
K的二次型,这样会导致计算量太复杂,so只要这个等式成立就好,那么这里令
K
=
R
−
1
B
T
P
K = R{-1}BTP
K=R−1BTP,然后式(11),可以化为
A
T
P
P
A
Q
K
T
R
(
R
−
1
B
T
P
)
−
K
T
B
T
P
−
P
B
(
R
−
1
B
T
P
)
=
0
A{T}P+PA+Q+K{T}R(R{-1}BTP)-K{T}B{T}P-PB(R{-1}BTP)=0
ATP+PA+Q+KTR(R−1BTP)−KTBTP−PB(R−1BTP)=0
A
T
P
P
A
Q
−
P
B
R
−
1
B
T
P
=
0
(12)
A{T}P+PA+Q-PBR{-1}B^TP=0 \tag{12}
ATP+PA+Q−PBR−1BTP=0(12)
式(12)中,
A
,
B
,
Q
,
R
A,B,Q,R
A,B,Q,R都是已知量,那么通过式(12)可以求解出
P
P
P,式(12)就是著名的Riccati方程。
总结
上面,从理论以及公式推导两个方面,介绍了LQR,现在从头看一下LQR的思路:
- 选择参数矩阵Q,R
- 求解Riccati方程得到矩阵P
- 根据P计算
K
=
R
−
1
B
T
P
K=R{-1}B{T}P
K=R−1BTP
- 计算控制量
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。

需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
{T}B{T}P-PB(R{-1}B^TP)=0
ATP+PA+Q+KTR(R−1BTP)−KTBTP−PB(R−1BTP)=0
A
T
P
P
A
Q
−
P
B
R
−
1
B
T
P
=
0
(12)
A{T}P+PA+Q-PBR{-1}B^TP=0 \tag{12}
ATP+PA+Q−PBR−1BTP=0(12)
式(12)中,
A
,
B
,
Q
,
R
A,B,Q,R
A,B,Q,R都是已知量,那么通过式(12)可以求解出
P
P
P,式(12)就是著名的Riccati方程。
总结
上面,从理论以及公式推导两个方面,介绍了LQR,现在从头看一下LQR的思路:
- 选择参数矩阵Q,R
- 求解Riccati方程得到矩阵P
- 根据P计算
K
=
R
−
1
B
T
P
K=R{-1}B{T}P
K=R−1BTP
- 计算控制量
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
[外链图片转存中…(img-wIgZfPMW-1715887765283)]
[外链图片转存中…(img-irb9KxXm-1715887765283)]
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 1480
1480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









