




卡尔曼滤波算法(python),对数据进行平滑处理以及降噪。
以下文字及代码仅供参考。
卡尔曼滤波是一种用于估计动态系统状态的算法,特别适用于处理带有噪声的数据。它通过预测和更新两个步骤来估计系统的状态,并且可以有效地对数据进行平滑处理和降噪。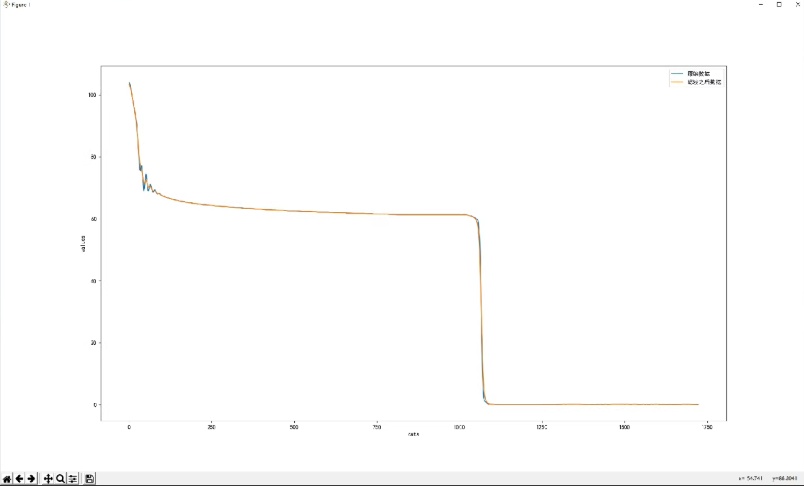
定义了一个use_kalman函数来应用卡尔曼滤波。需要实现具体的卡尔曼滤波算法。示例代码,包括卡尔曼滤波的实现和数据可视化:
完整代码
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import block_diag
def kalman_filter(data, R=0.01, Q=0.0001):
n_iter = len(data)
sz = (n_iter,) # size of array
# Allocate space for arrays
xhat = np.zeros(sz) # a posteri estimate of x
P = np.zeros(sz) # a posteri error estimate
xhatminus = np.zeros(sz) # a priori estimate of x
Pminus = np.zeros(sz) # a priori error estimate
K = np.zeros(sz) # gain or blending factor
# Initial guesses
xhat[0] = data[0]
P[0] = 1.0
for k in range(1, n_iter):
# Time update (prediction)
xhatminus[k] = xhat[k-1]
Pminus[k] = P[k-1] + Q
# Measurement update (correction)
K[k] = Pminus[k 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 916
916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









