






卡尔曼滤波算法(python),对数据进行平滑处理以及降噪。
以下文字及代码仅供参考。
卡尔曼滤波是一种用于估计动态系统状态的算法,特别适用于处理带有噪声的数据。它通过预测和更新两个步骤来估计系统的状态,并且可以有效地对数据进行平滑处理和降噪。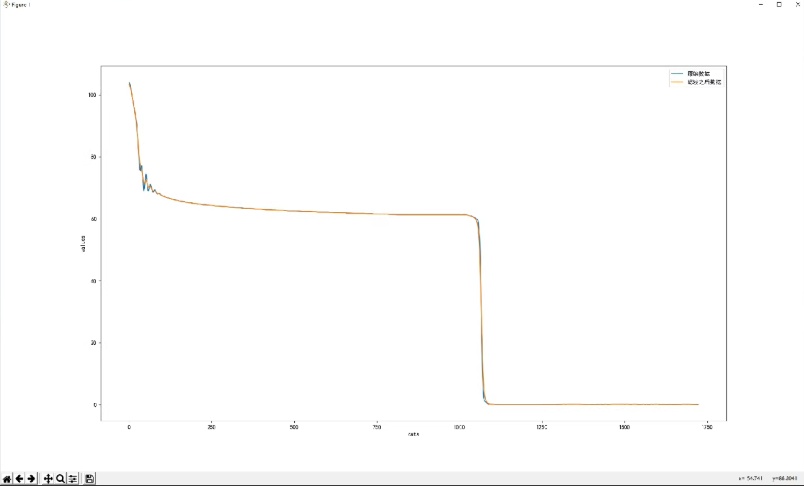
定义了一个use_kalman函数来应用卡尔曼滤波。需要实现具体的卡尔曼滤波算法。示例代码,包括卡尔曼滤波的实现和数据可视化:
完整代码
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import block_diag
def kalman_filter(data, R=0.01, Q=0.0001):
n_iter = len(data)
sz = (n_iter,) # size of array
# Allocate space for arrays
xhat = np.zeros(sz) # a posteri estimate of x
P = np.zeros(sz) # a posteri error estimate
xhatminus = np.zeros(sz) # a priori estimate of x
Pminus = np.zeros(sz) # a priori error estimate
K = np.zeros(sz) # gain or blending factor
# Initial guesses
xhat[0] = data[0]
P[0] = 1.0
for k in range(1, n_iter):
# Time update (prediction)
xhatminus[k] = xhat[k-1]
Pminus[k] = P[k-1] + Q
# Measurement update (correction)
K[k] = Pminus[k] / (Pminus[k] + R)
xhat[k] = xhatminus[k] + K[k] * (data[k] - xhatminus[k])
P[k] = (1 - K[k]) * Pminus[k]
return xhat
def use_kalman(data):
# 获取你要进行滤波的列的对应数据
origin_flow = data['实际数据'].values
# 进行维度变换
origin_flow = np.reshape(origin_flow, (-1, 1))
# 转化成列表
select_data = [float(i) for i in origin_flow]
# 调用滤波算法,最后的0.0001为惩罚系数,通过调节惩罚系数控制滤波效果
filter_data = kalman_filter(select_data, R=0.0001, Q=0.0001)
# 将滤波前后数据进行可视化
plt.plot(origin_flow, label='原始数据')
plt.plot(filter_data, label='滤波之后数据')
plt.xlabel('data')
plt.ylabel('values')
plt.legend()
plt.show()
# 示例数据
data = {
'实际数据': np.random.normal(loc=5, scale=2, size=100) + np.sin(np.linspace(0, 3*np.pi, 100))
}
use_kalman(data)
代码解释
-
kalman_filter 函数:
data: 输入数据序列。R: 测量噪声方差。Q: 过程噪声方差。xhat: 卡尔曼滤波后的估计值。P: 估计误差协方差矩阵。K: 卡尔曼增益。
-
use_kalman 函数:
- 从输入数据中提取需要滤波的列。
- 对数据进行维度变换和类型转换。
- 调用
kalman_filter函数进行滤波。 - 使用
matplotlib可视化原始数据和滤波后的数据。
注意事项
- 参数调整:
R和Q是卡尔曼滤波中的重要参数,它们分别表示测量噪声和过程噪声的方差。你可以根据实际情况调整这些参数以获得更好的滤波效果。 - 数据预处理: 在实际应用中,可能需要对数据进行一些预处理,例如去除异常值、填充缺失值等。
- 性能优化: 如果数据量非常大,可以考虑使用更高效的实现方式,例如利用矩阵运算加速计算。
帮助你理解和应用卡尔曼滤波算法
卡尔曼滤波,并且能够对数据进行平滑处理和降噪。接下来,我将提供一个更完整的代码示例,包括生成一些模拟数据、应用卡尔曼滤波以及可视化结果的完整流程。
完整代码示例
import numpy as np
import matplotlib.pyplot as plt
def kalman_filter(data, R=0.01, Q=0.0001):
n_iter = len(data)
sz = (n_iter,) # size of array
# Allocate space for arrays
xhat = np.zeros(sz) # a posteri estimate of x
P = np.zeros(sz) # a posteri error estimate
xhatminus = np.zeros(sz) # a priori estimate of x
Pminus = np.zeros(sz) # a priori error estimate
K = np.zeros(sz) # gain or blending factor
# Initial guesses
xhat[0] = data[0]
P[0] = 1.0
for k in range(1, n_iter):
# Time update (prediction)
xhatminus[k] = xhat[k-1]
Pminus[k] = P[k-1] + Q
# Measurement update (correction)
K[k] = Pminus[k] / (Pminus[k] + R)
xhat[k] = xhatminus[k] + K[k] * (data[k] - xhatminus[k])
P[k] = (1 - K[k]) * Pminus[k]
return xhat
def use_kalman(data):
# 获取你要进行滤波的列的对应数据
origin_flow = data['实际数据'].values
# 进行维度变换
origin_flow = np.reshape(origin_flow, (-1, 1))
# 转化成列表
select_data = [float(i) for i in origin_flow]
# 调用滤波算法,最后的0.0001为惩罚系数,通过调节惩罚系数控制滤波效果
filter_data = kalman_filter(select_data, R=0.0001, Q=0.0001)
# 将滤波前后数据进行可视化
plt.plot(origin_flow, label='原始数据')
plt.plot(filter_data, label='滤波之后数据')
plt.xlabel('data')
plt.ylabel('values')
plt.legend()
plt.show()
# 示例数据
np.random.seed(42)
true_values = np.sin(np.linspace(0, 3*np.pi, 100)) + 5
noise = np.random.normal(loc=0, scale=2, size=true_values.shape)
data = {
'实际数据': true_values + noise
}
use_kalman(data)
代码解释
-
kalman_filter 函数:
data: 输入数据序列。R: 测量噪声方差。Q: 过程噪声方差。xhat: 卡尔曼滤波后的估计值。P: 估计误差协方差矩阵。K: 卡尔曼增益。
-
use_kalman 函数:
- 从输入数据中提取需要滤波的列。
- 对数据进行维度变换和类型转换。
- 调用
kalman_filter函数进行滤波。 - 使用
matplotlib可视化原始数据和滤波后的数据。
-
示例数据生成:
- 使用
numpy生成一个带有噪声的正弦信号作为示例数据。
- 使用
结果分析
可以看到原始数据和滤波后的数据曲线。卡尔曼滤波有效地平滑了数据并减少了噪声的影响。你可以通过调整 R 和 Q 参数来进一步优化滤波效果。
如果你有实际的数据文件(例如CSV文件),可以使用 pandas 库来加载数据:
import pandas as pd
# 加载数据
data = pd.read_csv('path_to_your_data.csv')
use_kalman(data)


















 547
547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









