






官方的开发实践指南中写了一个uart_sample命令,用来初始化AB32VG1的3个串口,本文是我仿照官方实践指南写的一篇笔记,并没有写串口命令,而是单纯地操作uart1端口。
硬件引脚
AB32VG1开发板的单片机上有三组UART接口,本来想着板子上自带CH340芯片,可以直接用调试口(uart0)来做串口实验,谁知uart0已经用作了msh命令行的接口,不好验证串口代码,所以只能选择uart1了。
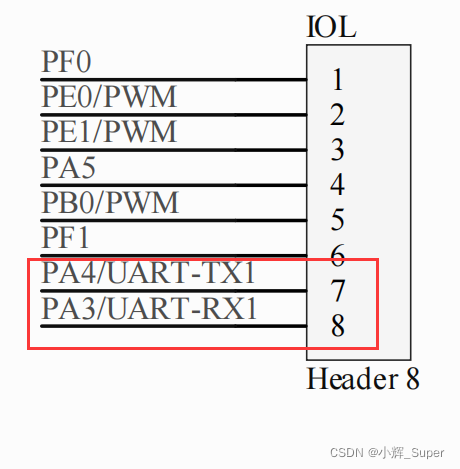
UART1对应的引脚为PA3和PA4。通过排座IOL引出。
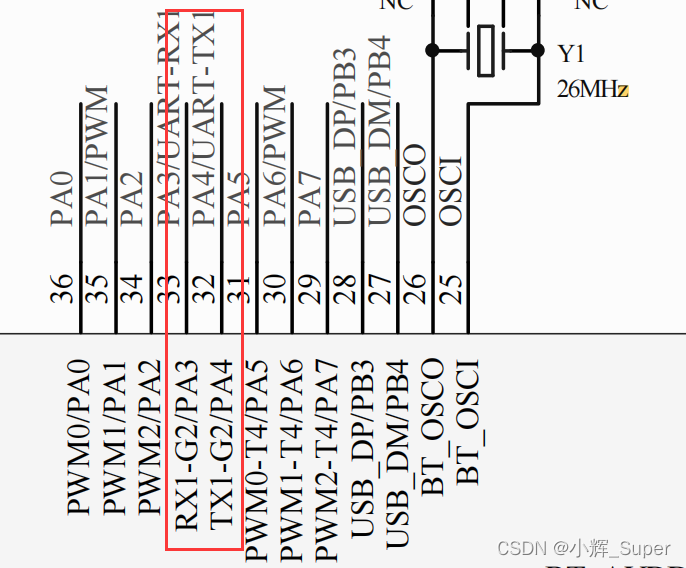
虽然不能用uart0做实验,但还是简单提一下uart0的硬件引脚吧,它只有一个引脚——PA7(1-wire 串口)
下图的PAI121M31是数字隔离芯片,单片机的PA引脚与Update相连(P6的3,4脚短接),上面的J1也需要通过跳帽短接。由于我也第一次接触到单线协议的串口,所以暂时不作深入了解。

串口配置
Demo工程默认是没有开启UART1的,所以需要手动开启,方法:

在工程目录/libraries/hal_drivers/drv_usart.c文件中,已经对UART1进行了配置,下面是UART1的一部分配置:

在该文件中,rt_hw_usart_init()函数对所有开启的串口进行了初始化。RT_SERIAL_CONFIG_DEFAULT是串口的默认配置,下面的UART object是另外的配置项。可以注意该函数将串口波特率设置成了1500000(使用下载软件的msh控制台需要1500000的波特率),我对其进行了适当的修改,将uart1的波特率改成了115200。

编写功能代码
完整工程代码见文末(main.c)
先创建一个空白的工程,然后修改main.c(小实验,不另创工程文件了)
串口初始化
官方的开发实践指南中写了一个uart_sample的命令(可以在msh中使用的命令)来初始化所以串口,而我直接将uart1的初始化函数uart1_init()放到了main函数里,该函数主要的任务是:
- 查找uart1
- 打开uart1
- 初始化一个信号量(用来实现串口接收回调函数与串口线程的通信)
- 设置回调函数(串口接收中断触发后会调用该函数)
- 创建串口线程
- 启动线程
/\* 动态线程参数 \*/
#define THREAD\_PRIORITY 25 //线程优先级
#define THREAD\_STACK\_SIZE 512 //线程栈大小
#define THREAD\_TIMESLICE 5 //时钟片
//串口设备
static rt\_device\_t serial;
//用于接收消息的信号量
static struct rt\_semaphore uart1_sem;
/\* 串口1初始函数 \*/
rt\_err\_t uart1\_init()
{
rt\_err\_t ret = RT_EOK;
char uart_name[] = "uart1";
/\* 查找系统中的串口设备 \*/
serial = rt\_device\_find(uart_name);
if(!serial)
{
rt\_kprintf("find %s failed.\n", uart_name);
return RT_ERROR;
}
/\* 初始化信号量 \*/
rt\_sem\_init(&uart1_sem, "uart1\_rx", 0, RT_IPC_FLAG_FIFO);
/\* 以中断接收及轮询发送模式打开串口设备 \*/
rt\_device\_open(serial, RT_DEVICE_FLAG_INT_RX);
/\* 设置接收回调函数 \*/
rt\_device\_set\_rx\_indicate(serial, uart1_recv);
/\* 发送字符串 \*/
//rt\_device\_write(serial, 0, "uart1 test", (sizeof("uart1 test") - 1));
/\* 创建串口线程 \*/
rt\_thread\_t thread = rt\_thread\_create("uart1", uart1_thread_entry, RT_NULL,
THREAD_STACK_SIZE, THREAD_PRIORITY, THREAD_TIMESLICE);
if(thread != RT_NULL)
{
rt\_thread\_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
串口接收回调函数
串口初始化时,信号量为0,回调函数会释放信号量,使信号量的值加1。
/\* 接收数据回调函数 \*/
static rt\_err\_t uart1\_recv(rt\_device\_t dev, rt\_size\_t size)
{
/\* 串口接收到数据后产生中断,调用此回调函数,然后发送信号量 \*/
rt\_sem\_release(&uart1_sem);
return RT_EOK;
}
串口线程入口函数
串口线程主要负责将串口接收到的数据再发送回串口,同时通过msh打印接收结果。只有当信号量不为0(串口接收中断运行后),线程函数中的rt_device_read才能读到数据,否则函数将一直阻塞等待信号量的释放。
/\* 串口线程入口函数 \*/
static void uart1\_thread\_entry(void \*parameter)
{
char ch;
while(1)
{
/\* 从串口读取一个字节的数据, 没有读取到则等待信号量 \*/
while(rt\_device\_read(serial, -1, &ch, 1) != 1)
{
/\* 阻塞等待信号量,等到信号量后再次读取数据 \*/
rt\_sem\_take(&uart1_sem, RT_WAITING_FOREVER);
}
/\* 读到数据后发送到串口 \*/
rt\_device\_write(serial, 0, &ch, 1);
/\* 打印接收的字节 \*/
rt\_kprintf("The byte received is %c\n", ch);
}
}
实验效果
通过串口调试助手向单片机发送字节数据,单片机会通过串口返回发送的数据,同时msh控制台会打印uart1的接收结果。

完整工程代码
核心功能代码,man.c文件
#include <rtthread.h>
#include "board.h"
/\* 动态线程参数 \*/
#define THREAD\_PRIORITY 25 //线程优先级
#define THREAD\_STACK\_SIZE 512 //线程栈大小
#define THREAD\_TIMESLICE 5 //时钟片
//串口设备
static rt\_device\_t serial;
//用于接收消息的信号量
static struct rt\_semaphore uart1_sem;
/\* 接收数据回调函数 \*/
static rt\_err\_t uart1\_recv(rt\_device\_t dev, rt\_size\_t size)
{
/\* 串口接收到数据后产生中断,调用此回调函数,然后发送信号量 \*/
rt\_sem\_release(&uart1_sem);
return RT_EOK;
}
/\* 串口线程入口函数 \*/
static void uart1\_thread\_entry(void \*parameter)
{
char ch;
while(1)
{
/\* 从串口读取一个字节的数据, 没有读取到则等待信号量 \*/
while(rt\_device\_read(serial, -1, &ch, 1) != 1)
{
/\* 阻塞等待信号量,等到信号量后再次读取数据 \*/
rt\_sem\_take(&uart1_sem, RT_WAITING_FOREVER);
}
/\* 读到数据后发送到串口 \*/
rt\_device\_write(serial, 0, &ch, 1);















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









