






print ‘hello’
def compute_harris_response(im,sigma=3):
“”" Compute the Harris corner detector response function
for each pixel in a graylevel image. “”"
# derivatives
imx = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)
imy = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)
# compute components of the Harris matrix
Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma)
# determinant and trace
Wdet = Wxx*Wyy - Wxy**2
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.1):
“”" Return corners from a Harris response image
min_dist is the minimum number of pixels separating
corners and image boundary. “”"
# find top corner candidates above a threshold
corner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > corner_threshold) * 1
# get coordinates of candidates
coords = array(harrisim_t.nonzero()).T
# ...and their values
candidate_values = [harrisim[c[0],c[1]] for c in coords]
# sort candidates (reverse to get descending order)
index = argsort(candidate_values)[::-1]
# store allowed point locations in array
allowed_locations = zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
# select the best points taking min\_distance into account
filtered_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),
(coords[i,1]-min_dist):(coords[i,1]+min_dist)] = 0
return filtered_coords
def plot_harris_points(image,filtered_coords):
“”" Plots corners found in image. “”"
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],
[p[0] for p in filtered_coords],'\*')
axis('off')
show()
def get_descriptors(image,filtered_coords,wid=5):
“”" For each point return pixel values around the point
using a neighbourhood of width 2*wid+1. (Assume points are
extracted with min_distance > wid). “”"
desc = []
for coords in filtered_coords:
patch = image[coords[0]-wid:coords[0]+wid+1,
coords[1]-wid:coords[1]+wid+1].flatten()
desc.append(patch)
return desc
def match(desc1,desc2,threshold=0.5):
“”" For each corner point descriptor in the first image,
select its match to second image using
normalized cross correlation. “”"
n = len(desc1[0])
# pair-wise distances
d = -ones((len(desc1),len(desc2)))
for i in range(len(desc1)):
for j in range(len(desc2)):
d1 = (desc1[i] - mean(desc1[i])) / std(desc1[i])
d2 = (desc2[j] - mean(desc2[j])) / std(desc2[j])
ncc_value = sum(d1 * d2) / (n-1)
if ncc_value > threshold:
d[i,j] = ncc_value
ndx = argsort(-d)
matchscores = ndx[:,0]
return matchscores
def match_twosided(desc1,desc2,threshold=0.5):
“”" Two-sided symmetric version of match(). “”"
matches_12 = match(desc1,desc2,threshold)
matches_21 = match(desc2,desc1,threshold)
ndx_12 = where(matches_12 >= 0)[0]
# remove matches that are not symmetric
for n in ndx_12:
if matches_21[matches_12[n]] != n:
matches_12[n] = -1
return matches_12
def appendimages(im1,im2):
“”" Return a new image that appends the two images side-by-side. “”"
# select the image with the fewest rows and fill in enough empty rows
rows1 = im1.shape[0]
rows2 = im2.shape[0]
if rows1 < rows2:
im1 = concatenate((im1,zeros((rows2-rows1,im1.shape[1]))),axis=0)
elif rows1 > rows2:
im2 = concatenate((im2,zeros((rows1-rows2,im2.shape[1]))),axis=0)
# if none of these cases they are equal, no filling needed.
return concatenate((im1,im2), axis=1)
def plot_matches(im1,im2,locs1,locs2,matchscores,show_below=True):
“”" Show a figure with lines joining the accepted matches
input: im1,im2 (images as arrays), locs1,locs2 (feature locations),
matchscores (as output from ‘match()’),
show_below (if images should be shown below matches). “”"
im3 = appendimages(im1,im2)
if show_below:
im3 = vstack((im3,im3))
imshow(im3)
cols1 = im1.shape[1]
for i,m in enumerate(matchscores):
if m>0:
plot([locs1[i][1],locs2[m][1]+cols1],[locs1[i][0],locs2[m][0]],'c')
axis('off')
def imresize(im,sz):
“”" Resize an image array using PIL. “”"
pil_im = Image.fromarray(uint8(im))
return array(pil_im.resize(sz))
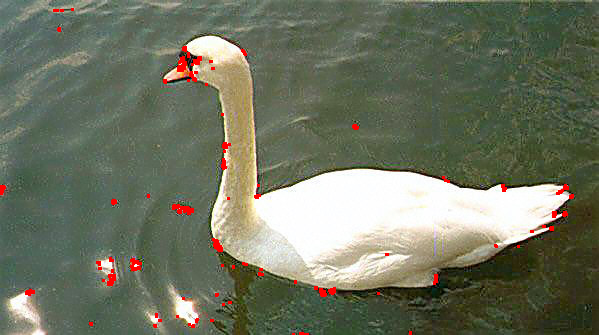
“”"
Example of detecting Harris corner points (Figure 2-1 in the book).
“”"
读入图像
im = array(Image.open(‘swan.jpg’).convert(‘L’))
检测harris角点
harrisim = compute_harris_response(im)
Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()
#画出Harris响应图
subplot(141)
imshow(harrisim1)
print harrisim1.shape
axis(‘off’)
axis(‘equal’)
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = get_harris_points(harrisim, 6, thres)
subplot(1, 4, i+2)
imshow(im)
print im.shape
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], ‘*’)
axis(‘off’)
#原书采用的PCV中PCV harris模块
#harris.plot_harris_points(im, filtered_coords)
plot only 200 strongest
harris.plot_harris_points(im, filtered_coords[:200])
Figure 2-2下面的图
im1 = array(Image.open(“swan.jpg”).convert(“L”))
im2 = array(Image.open(“swan.jpg”).convert(“L”))
resize to make matching faster
im1 = imresize(im1, (im1.shape[1]/2, im1.shape[0]/2))
im2 = imresize(im2, (im2.shape[1]/2, im2.shape[0]/2))
wid = 5
harrisim = compute_harris_response(im1, 5)
filtered_coords1 = get_harris_points(harrisim, wid+1)
d1 = get_descriptors(im1, filtered_coords1, wid)
harrisim = compute_harris_response(im2, 5)
filtered_coords2 = get_harris_points(harrisim, wid+1)
d2 = get_descriptors(im2, filtered_coords2, wid)
print ‘starting matching’
matches = match_twosided(d1, d2)
figure()
gray()
plot_matches(im1, im2, filtered_coords1, filtered_coords2, matches)
show()
OpenCV函数cv2.cornerHarris() 有四个参数 其作用分别为 :
img - Input image, it should be grayscale and float32 type.
blockSize - It is the size of neighbourhood considered for corner detection
ksize - Aperture parameter of Sobel derivative used.
k - Harris detector free parameter in the equation.
当然可以使用OpenCV在亚像素上提高算法的精度,使用函数cv2.cornerSubPix(),不过应该使用最新版的OpenCV 我电脑上是2.4.9版本,好像文档[2]中的代码没有调试通过,
下面是OpenCV代码的效果:
代码:
-*- coding: utf-8 -*-
“”"
Created on Sat Jun 11 23:21:18 2016
@author: season
“”"
import cv2
import numpy as np
filename = ‘swan.jpg’
img = cv2.imread(filename)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv2.cornerHarris(gray,2,3,0.04)
#result is dilated for marking the corners, not important
dst = cv2.dilate(dst,None)
Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow(‘dst’,img)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()
测试OpenCV,numpy模块的代码:
#test cv2 and numpy package
print cv2.version
a = np.arange(10)
print(a)
## 2.sift特征
在Harris角点中对于下图所示的特征,小窗口中可能认为是角点,当窗口尺寸变化,则可能检测不到角点。
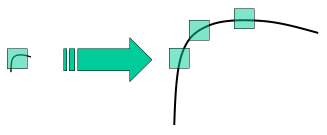
2004年提出的Scale Invariant Feature Transform (SIFT) 是改进的基于尺度不变的特征检测器。
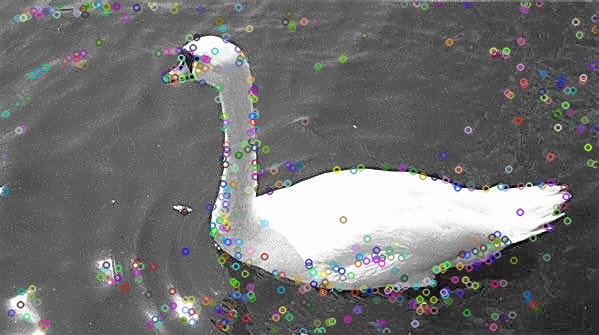
SIFT特征包括兴趣点检测器和描述子,它对于尺度,旋转和亮度都具有不变性。
有下面四个步骤
1. Scale-space Extrema Detection
2. Keypoint Localization
3. Orientation Assignment
4. Keypoint Descriptor
5. Keypoint Matching
sift特征点检测效果:
sift的OpenCV代码比较简单:
-*- coding: utf-8 -*-
“”"
Created on Sat Jun 11 20:22:51 2016
@author: season
“”"
import cv2
import numpy as np
#import pdb
#pdb.set_trace()#turn on the pdb prompt
#test cv2 and numpy package
print cv2.version
a = np.arange(10)
print(a)
img = cv2.imread(‘swan.jpg’)
gray= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT()
kp = sift.detect(gray,None)
img=cv2.drawKeypoints(gray,kp)
cv2.imwrite(‘sift_keypoints.jpg’,img)
cv2.imshow(“sift_keypoint”,img)
cv2.waitKey(0)
cv2.destroyAllWindows()
## 3.SURF特征点
In 2006, three people, Bay, H., Tuytelaars, T. and Van Gool, L, published another paper, “SURF: Speeded Up Robust Features” which introduced a new algorithm called SURF. As name suggests, it is a speeded-up version of SIFT.
在SURF算法中,特征点的判据为某像素亮度的Hessian矩阵的行列式(Dxx\*Dyy-Dxy\*Dxy)为一个极值。由于Hessian矩阵的计算需要用到偏导数的计算,这一般通过像素点亮度值与高斯核的某一方向偏导数卷积而成;在SURF算法里,为提高算法运行速度,在精度影响很小的情况下,用近似的盒状滤波器(0,1,1组成的box filter)代替高斯核。因为滤波器仅有0,-1,1,因此卷积的计算可以用积分图像(Integral image)来优化(O(1)的时间复杂度),大大提高了效率。
Surf在速度上比sift要快许多,这主要得益于它的积分图技术,已经Hessian矩阵的利用减少了降采样过程,另外它得到的特征向量维数也比较少,有利于更快的进行特征点匹配。
基于surf的人脸识别:
-*- coding: utf-8 -*-
“”"
Created on Wed Jun 15 22:05:44 2016
@author: Administrator
“”"
import cv2
import numpy
opencv_haystack =cv2.imread(‘woman.jpg’)
opencv_needle =cv2.imread(‘face.jpg’)
ngrey = cv2.cvtColor(opencv_needle, cv2.COLOR_BGR2GRAY)
hgrey = cv2.cvtColor(opencv_haystack, cv2.COLOR_BGR2GRAY)
build feature detector and descriptor extractor
hessian_threshold = 85
detector = cv2.SURF(hessian_threshold)
(hkeypoints, hdescriptors) = detector.detect(hgrey, None, useProvidedKeypoints = False)
(nkeypoints, ndescriptors) = detector.detect(ngrey, None, useProvidedKeypoints = False)
extract vectors of size 64 from raw descriptors numpy arrays
rowsize = len(hdescriptors) / len(hkeypoints)
if rowsize > 1:
hrows = numpy.array(hdescriptors, dtype = numpy.float32).reshape((-1, rowsize))
nrows = numpy.array(ndescriptors, dtype = numpy.float32).reshape((-1, rowsize))
#print hrows.shape, nrows.shape
else:
hrows = numpy.array(hdescriptors, dtype = numpy.float32)
nrows = numpy.array(ndescriptors, dtype = numpy.float32)
rowsize = len(hrows[0])
kNN training - learn mapping from hrow to hkeypoints index
samples = hrows
responses = numpy.arange(len(hkeypoints), dtype = numpy.float32)
#print len(samples), len(responses)
knn = cv2.KNearest()
knn.train(samples,responses)
retrieve index and value through enumeration
count = 1
for i, descriptor in enumerate(nrows):
descriptor = numpy.array(descriptor, dtype = numpy.float32).reshape((1, rowsize))
#print i, descriptor.shape, samples[0].shape
retval, results, neigh_resp, dists = knn.find_nearest(descriptor, 1)
res, dist = int(results[0][0]), dists[0][0]
#print res, dist
if dist < 0.1:
count = count+1
# draw matched keypoints in red color
color = (0, 0, 255)
else:
# draw unmatched in blue color
color = (255, 0, 0)
# draw matched key points on haystack image
x,y = hkeypoints[res].pt
center = (int(x),int(y))
cv2.circle(opencv_haystack,center,2,color,-1)
# draw matched key points on needle image
x,y = nkeypoints[i].pt
center = (int(x),int(y))
cv2.circle(opencv_needle,center,2,color,-1)
cv2.imshow(“Input Image”, opencv_haystack)
cv2.waitKey(0)
cv2.imshow(“The match Result”, opencv_needle)
cv2.waitKey(0)
print count
if count>40:
print “Yes Success!”
else:
print “False Face!”
#cv2.waitKey(0)
#cv2.destroyAllWindows()
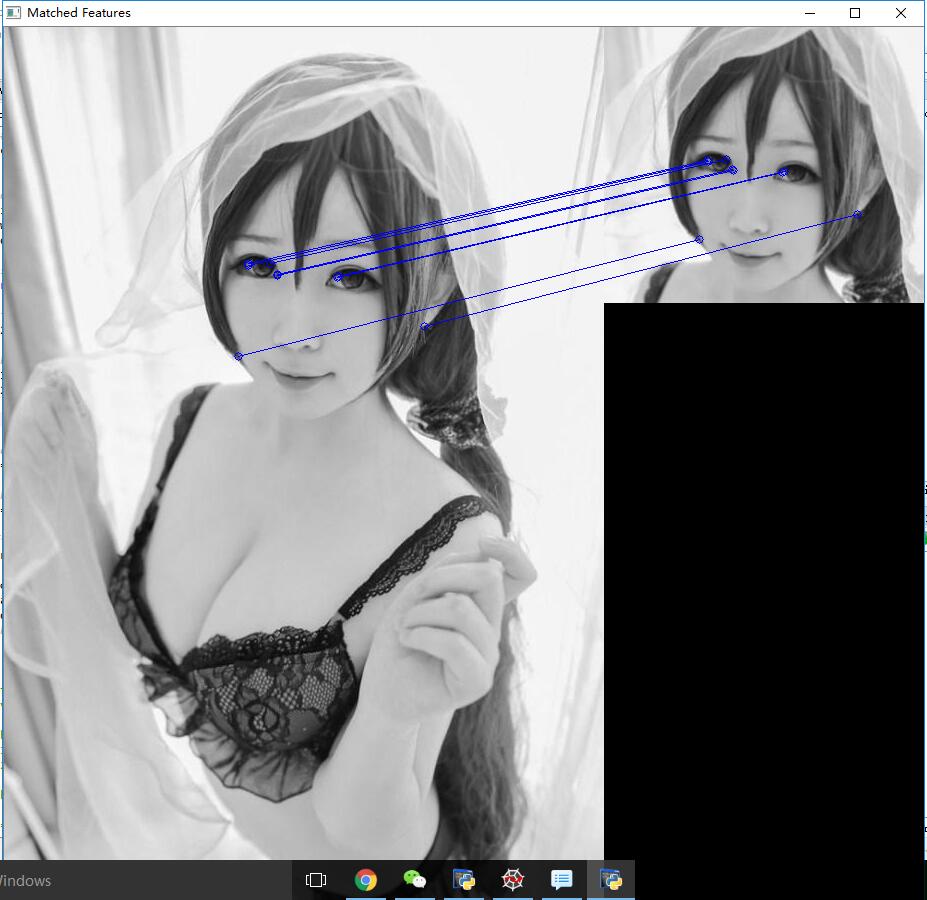
## 4.ORB特征
一种新的具有**局部不变性**的特征 —— ORB特征,从它的名字中可以看出它是对FAST特征点与BREIF特征描述子的一种结合与改进,这个算法是由Ethan Rublee,Vincent Rabaud,Kurt Konolige以及Gary R.Bradski在2011年一篇名为“ORB:An Efficient Alternative to SIFT or SURF”的文章中提出。就像文章题目所写一样,ORB是除了SIFT与SURF外一个很好的选择,而且它有很高的效率,最重要的一点是它是免费的,SIFT与SURF都是有专利的,你如果在商业软件中使用,需要购买许可。
实现效果:
代码:
-*- coding: utf-8 -*-
“”"
Created on Thu Jun 16 11:11:18 2016
@author: Administrator
“”"
import numpy as np
import cv2
#from matplotlib import pyplot as plt
print cv2.version
img1 = cv2.imread(‘woman.jpg’,0) # queryImage
img2 = cv2.imread(‘face.jpg’,0) # trainImage
def drawMatches(img1, kp1, img2, kp2, matches):
“”"
My own implementation of cv2.drawMatches as OpenCV 2.4.9
does not have this function available but it’s supported in
OpenCV 3.0.0
This function takes in two images with their associated
keypoints, as well as a list of DMatch data structure (matches)
that contains which keypoints matched in which images.
An image will be produced where a montage is shown with
the first image followed by the second image beside it.
Keypoints are delineated with circles, while lines are connected
between matching keypoints.
img1,img2 - Grayscale images
kp1,kp2 - Detected list of keypoints through any of the OpenCV keypoint
detection algorithms
matches - A list of matches of corresponding keypoints through any
OpenCV keypoint matching algorithm















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









