






使用深度学习框架(如PyTorch/YOLO)训练指针式仪表的目标检测和语义分割模型,并建立推理代码及可视化界面,训练指针式仪表数据集 检测和分割数据集
文章目录
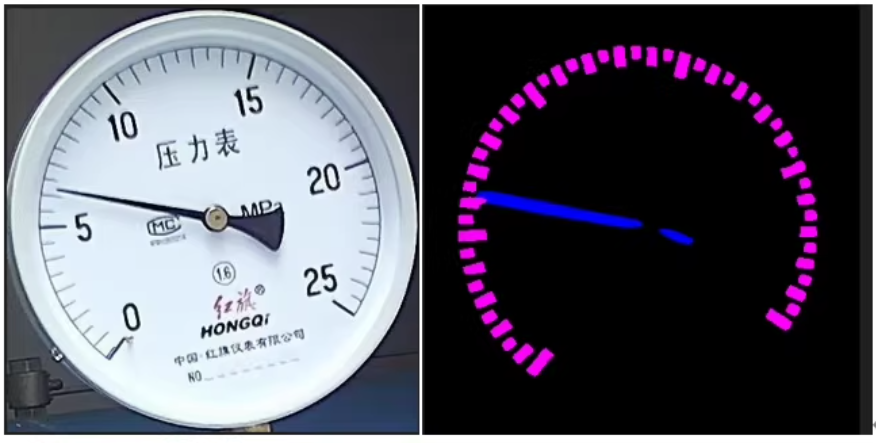
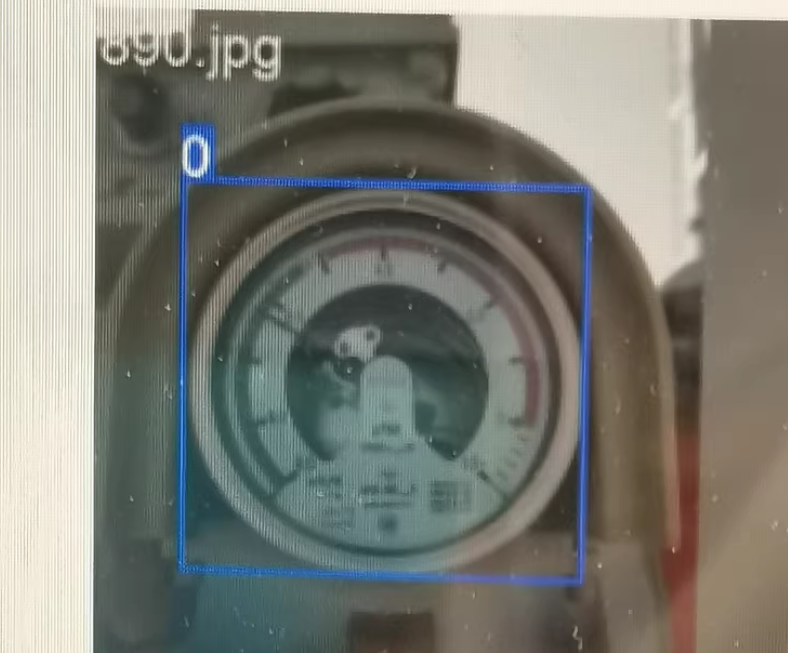
3000多张指针式仪表,目标检测,语义分割,数据集和标注文件
1
1

使用深度学习框架(如PyTorch或YOLO)训练指针式仪表的目标检测和语义分割模型,并建立推理代码及可视化界面。
任务概述
- 目标:
- 目标检测:识别仪表盘上的指针位置。
- 语义分割:对仪表盘的各个部件进行像素级分类。
- 数据集:
- 3000多张图像,已标注。
- 标注文件可能是边界框(目标检测)或像素掩码(语义分割)。
- 工具:
- 目标检测:YOLOv5/v8 或 PyTorch Faster R-CNN。
- 语义分割:PyTorch DeepLabV3 或 MMSegmentation。
- 可视化界面:使用
Tkinter或Streamlit构建图形化界面。
步骤 1:环境准备
确保安装了必要的库。
# 安装依赖
pip install torch torchvision matplotlib opencv-python ultralytics streamlit
步骤 2:数据集处理
目标检测数据集
- 格式:YOLO需要每个图像对应一个txt文件,包含目标的类别和归一化的边界框坐标。
- 目录结构:
dataset/ ├── images/ │ ├── train/ │ ├── val/ │ └── test/ └── labels/ ├── train/ ├── val/ └── test/
语义分割数据集
- 格式:每个图像对应一个掩码图像,掩码图像的像素值表示类别索引。
- 目录结构:
dataset/ ├── images/ │ ├── train/ │ ├── val/ │ └── test/ └── masks/ ├── train/ ├── val/ └── test/
步骤 3:目标检测训练代码
YOLOv8 训练代码
from ultralytics import YOLO
# 加载预训练模型
model = YOLO('yolov8n.pt') # 使用YOLOv8 Nano模型
# 配置数据集
data_yaml = 'dataset.yaml'
# 开始训练
results = model.train(
data=data_yaml,
epochs=50, # 训练轮数
imgsz=640, # 输入图像尺寸
batch=16, # 批量大小
device='cuda' # 使用GPU
)
# 验证模型
metrics = model.val()
# 保存模型
model.export(format='onnx') # 导出为ONNX格式
自定义目标检测模型(PyTorch Faster R-CNN)
import torch
import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
from torch.utils.data import DataLoader
from torchvision.transforms import ToTensor
from PIL import Image
import os
# 自定义数据集类
class PointerDataset(torch.utils.data.Dataset):
def __init__(self, root, transforms=None):
self.root = root
self.transforms = transforms
self.images = list(sorted(os.listdir(os.path.join(root, "images"))))
self.labels = list(sorted(os.listdir(os.path.join(root, "labels"))))
def __getitem__(self, idx):
img_path = os.path.join(self.root, "images", self.images[idx])
label_path = os.path.join(self.root, "labels", self.labels[idx])
image = Image.open(img_path).convert("RGB")
with open(label_path, 'r') as f:
boxes = []
for line in f.readlines():
class_id, x_center, y_center, width, height = map(float, line.strip().split())
x_min = (x_center - width / 2) * image.width
x_max = (x_center + width / 2) * image.width
y_min = (y_center - height / 2) * image.height
y_max = (y_center + height / 2) * image.height
boxes.append([x_min, y_min, x_max, y_max])
boxes = torch.as_tensor(boxes, dtype=torch.float32)
labels = torch.ones((len(boxes),), dtype=torch.int64) # 假设所有类别为1
target = {"boxes": boxes, "labels": labels}
if self.transforms:
image = self.transforms(image)
return image, target
def __len__(self):
return len(self.images)
# 创建模型
def get_model(num_classes):
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)
in_features = model.roi_heads.box_predictor.cls_score.in_features
model.roi_heads.box_predictor = FastRCNNPredictor(in_features, num_classes)
return model
# 数据加载器
dataset = PointerDataset(root="dataset/train", transforms=ToTensor())
data_loader = DataLoader(dataset, batch_size=2, shuffle=True, num_workers=4)
# 训练模型
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
model = get_model(num_classes=5) # 包括背景类
model.to(device)
optimizer = torch.optim.SGD(model.parameters(), lr=0.005, momentum=0.9, weight_decay=0.0005)
for epoch in range(10): # 训练10轮
model.train()
for images, targets in data_loader:
images = list(image.to(device) for image in images)
targets = [{k: v.to(device) for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
optimizer.zero_grad()
losses.backward()
optimizer.step()
print(f"Epoch {epoch+1}, Loss: {losses.item()}")
步骤 4:语义分割训练代码
DeepLabV3 训练代码
import torch
import torch.nn as nn
import torchvision
from torchvision import transforms
from torch.utils.data import DataLoader
from PIL import Image
import os
# 自定义数据集类
class SegmentationDataset(torch.utils.data.Dataset):
def __init__(self, image_dir, mask_dir, transform=None):
self.image_dir = image_dir
self.mask_dir = mask_dir
self.transform = transform
self.images = os.listdir(image_dir)
def __len__(self):
return len(self.images)
def __getitem__(self, idx):
img_path = os.path.join(self.image_dir, self.images[idx])
mask_path = os.path.join(self.mask_dir, self.images[idx].replace(".jpg", ".png"))
image = Image.open(img_path).convert("RGB")
mask = Image.open(mask_path)
if self.transform:
image = self.transform(image)
mask = self.transform(mask)
return image, mask
# 数据加载器
transform = transforms.Compose([
transforms.Resize((256, 256)),
transforms.ToTensor()
])
dataset = SegmentationDataset(image_dir="dataset/images/train", mask_dir="dataset/masks/train", transform=transform)
data_loader = DataLoader(dataset, batch_size=8, shuffle=True)
# 创建模型
model = torchvision.models.segmentation.deeplabv3_resnet50(pretrained=True)
model.classifier[-1] = nn.Conv2d(256, 5, kernel_size=(1, 1)) # 修改输出类别数
model.to(torch.device('cuda'))
# 训练模型
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
for epoch in range(10):
model.train()
for images, masks in data_loader:
images, masks = images.to('cuda'), masks.to('cuda')
outputs = model(images)['out']
loss = criterion(outputs, masks.long())
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f"Epoch {epoch+1}, Loss: {loss.item()}")
步骤 5:推理代码与可视化界面
推理代码
import cv2
import torch
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 推理
image = cv2.imread('test_image.jpg')
results = model(image)
# 绘制结果
for box in results[0].boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0])
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow("Result", image)
cv2.waitKey(0)
可视化界面
使用Streamlit创建简单的GUI:
import streamlit as st
from PIL import Image
import torch
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# Streamlit应用
st.title("指针式仪表检测")
uploaded_file = st.file_uploader("上传一张图片", type=["jpg", "png"])
if uploaded_file is not None:
image = Image.open(uploaded_file)
results = model(image)
# 显示结果
st.image(results[0].plot(), caption="检测结果", use_column_width=True)
总结
以上代码展示了如何使用YOLOv8和PyTorch完成目标检测和语义分割任务,并通过Streamlit构建可视化界面。您可以根据实际需求调整模型、数据集和界面设计。
仅供参考,



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









