







 工程车卡车数据集 一,矿场工程车检测数据集 10类 4900张 工程车 带标注voc yolo 分类名: (图片张数,标注个数)
工程车卡车数据集 一,矿场工程车检测数据集 10类 4900张 工程车 带标注voc yolo 分类名: (图片张数,标注个数)
excavator :(1086,1356)
dump_ truck: (1074, 1816)
compactor: (538, 583)
mobile_ crane: (529, 589)
tower_ cr ane :(169,235)
wheel_ loader :(851,922)
concrete_ mixer_ truck: (376, 427)
backhoe_ loader: (666, 693)
dozer: (492, 536)
grader: (622, 641)
总数: (4981, 7798)
总类(nc): 10类

矿场工程车检测数据集介绍
数据集概述
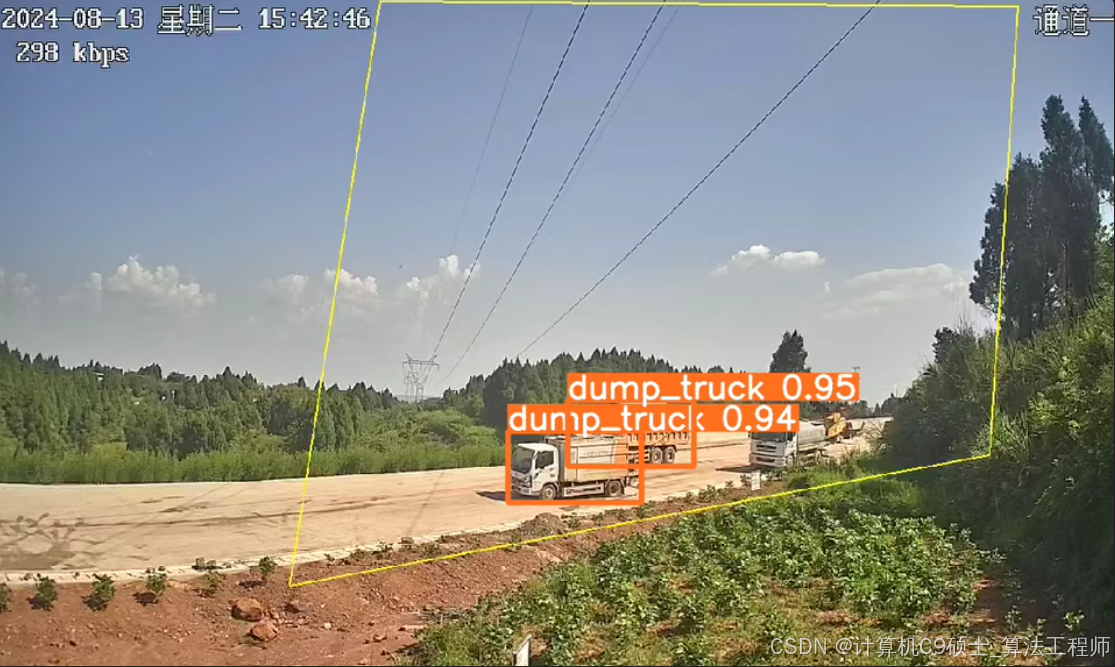
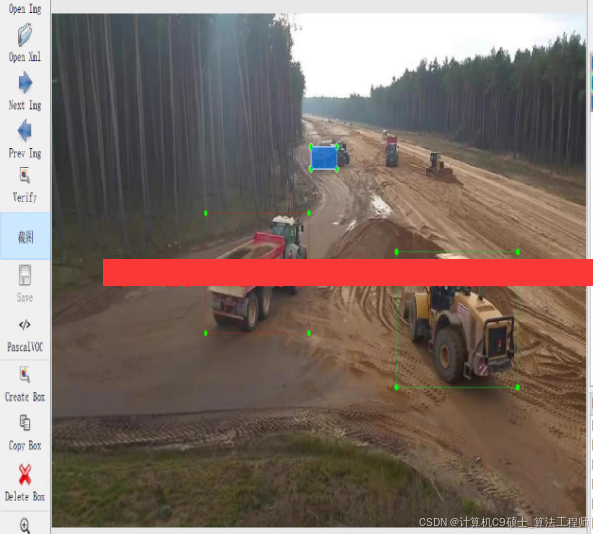
此数据集专为矿场工程车检测设计,包含了十种常见工程车辆的高清图像及相应的标注文件。数据集涵盖了多种类型的工程车辆,并且每个类别都有详细的标注信息。该数据集可以用于基于YOLO的目标检测算法模型训练。
数据集特点
- 高清影像:所有图像均为高清影像,适合用于精确的目标检测。
- 详细标注:每张图像都标注了不同工程车辆的位置,可以用于训练模型来识别这些车辆。
- 多样性:涵盖了不同类型的工程车辆,适用于多种环境下的应用。
- 直接可用性:数据集已按照标准VOC和YOLO TXT格式标注,无需进一步处理即可直接用于模型训练。
- 多类别:数据集中标注了十种类别,适合进行多目标检测任务。
数据集统计
| 车辆类型 | 图片数量 | 标注个数 |
|---|---|---|
| Excavator | 1,086 | 1,356 |
| Dump Truck | 1,074 | 1,816 |
| Compactor | 538 | 583 |
| Mobile Crane | 529 | 589 |
| Tower Crane | 169 | 235 |
| Wheel Loader | 851 | 922 |
| Concrete Mixer Truck | 376 | 427 |
| Backhoe Loader | 666 | 693 |
| Dozer | 492 | 536 |
| Grader | 622 | 641 |
| 总计 | 4,981 | 7,798 |
数据集结构
MiningEquipmentDetectionDataset/
├── images/ # 图像文件
│ ├── train/ # 训练集图像
│ │ ├── image_00001.jpg
│ │ ├── image_00002.jpg
│ │ └── ...
│ ├── val/ # 验证集图像
│ │ ├── image_00001.jpg
│ │ ├── image_00002.jpg
│ │ └── ...
│ └── test/ # 测试集图像
│ ├── image_00001.jpg
│ ├── image_00002.jpg
│ └── ...
└── labels/ # YOLO格式标注文件夹
├── train/ # 训练集标签
│ ├── image_00001.txt
│ ├── image_00002.txt
│ └── ...
├── val/ # 验证集标签
│ ├── image_00001.txt
│ ├── image_00002.txt
│ └── ...
└── test/ # 测试集标签
├── image_00001.txt
├── image_00002.txt
└── ...标注格式示例
YOLO格式
每行表示一个物体的边界框和类别:
class_id cx cy w hclass_id:类别ID(从0开始编号)- 0:
Excavator - 1:
Dump Truck - 2:
Compactor - 3:
Mobile Crane - 4:
Tower Crane - 5:
Wheel Loader - 6:
Concrete Mixer Truck - 7:
Backhoe Loader - 8:
Dozer - 9:
Grader
- 0:
cx:目标框中心点x坐标 / 图像宽度。cy:目标框中心点y坐标 / 图像高度。w:目标框宽度 / 图像宽度。h:目标框高度 / 图像高度。
例如:
0 0.453646 0.623148 0.234375 0.461111
1 0.553646 0.723148 0.134375 0.361111
2 0.353646 0.823148 0.154375 0.261111使用该数据集进行模型训练
1. 数据预处理与加载
首先,我们需要加载数据并将其转换为适合YOLOv5等模型使用的格式。假设你已经安装了PyTorch和YOLOv5。
import os
from PIL import Image
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
class MiningEquipmentDetectionDataset(Dataset):
def __init__(self, image_dir, label_dir, transform=None):
self.image_dir = image_dir
self.label_dir = label_dir
self.transform = transform
self.image_files = [f for f in os.listdir(image_dir) if f.endswith('.jpg')]
def __len__(self):
return len(self.image_files)
def __getitem__(self, idx):
img_name = self.image_files[idx]
img_path = os.path.join(self.image_dir, img_name)
label_path = os.path.join(self.label_dir, img_name.replace('.jpg', '.txt'))
# 加载图像
image = Image.open(img_path).convert('RGB')
if self.transform:
image = self.transform(image)
# 加载标注
with open(label_path, 'r') as file:
lines = file.readlines()
boxes = []
labels = []
for line in lines:
class_id, cx, cy, w, h = map(float, line.strip().split())
xmin = (cx - w / 2) * image.width
ymin = (cy - h / 2) * image.height
xmax = (cx + w / 2) * image.width
ymax = (cy + h / 2) * image.height
boxes.append([xmin, ymin, xmax, ymax])
labels.append(int(class_id))
boxes = torch.tensor(boxes, dtype=torch.float32)
labels = torch.tensor(labels, dtype=torch.int64)
return image, boxes, labels
# 数据增强
transform = transforms.Compose([
transforms.RandomHorizontalFlip(), # 随机水平翻转
transforms.RandomRotation(10), # 随机旋转
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1), # 随机颜色变换
transforms.Resize((640, 640)),
transforms.ToTensor(),
])
# 创建数据集
train_dataset = MiningEquipmentDetectionDataset(image_dir='MiningEquipmentDetectionDataset/images/train/', label_dir='MiningEquipmentDetectionDataset/labels/train/', transform=transform)
val_dataset = MiningEquipmentDetectionDataset(image_dir='MiningEquipmentDetectionDataset/images/val/', label_dir='MiningEquipmentDetectionDataset/labels/val/', transform=transform)
test_dataset = MiningEquipmentDetectionDataset(image_dir='MiningEquipmentDetectionDataset/images/test/', label_dir='MiningEquipmentDetectionDataset/labels/test/', transform=transform)
train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True, num_workers=4)
val_loader = DataLoader(val_dataset, batch_size=4, shuffle=False, num_workers=4)
test_loader = DataLoader(test_dataset, batch_size=4, shuffle=False, num_workers=4)2. 构建模型
我们可以使用YOLOv5模型进行目标检测任务。假设你已经克隆了YOLOv5仓库,并按照其文档进行了环境设置。
git clone https://github.com/ultralytics/yolov5
cd yolov5
pip install -r requirements.txt创建数据配置文件 data/mining_equipment_detection.yaml:
train: path/to/MiningEquipmentDetectionDataset/images/train
val: path/to/MiningEquipmentDetectionDataset/images/val
test: path/to/MiningEquipmentDetectionDataset/images/test
nc: 10 # 类别数
names: ['Excavator', 'Dump Truck', 'Compactor', 'Mobile Crane', 'Tower Crane', 'Wheel Loader', 'Concrete Mixer Truck', 'Backhoe Loader', 'Dozer', 'Grader']3. 训练模型
使用YOLOv5进行训练。
python train.py --img 640 --batch 16 --epochs 100 --data data/mining_equipment_detection.yaml --weights yolov5s.pt --cache4. 评估模型
在验证集上评估模型性能。
python val.py --img 640 --batch 16 --data data/mining_equipment_detection.yaml --weights runs/train/exp/weights/best.pt --task test5. 推理
使用训练好的模型进行推理。
python detect.py --source path/to/test/image.jpg --weights runs/train/exp/weights/best.pt --conf 0.5实验报告
实验报告应包括以下内容:
- 项目简介:简要描述项目的背景、目标和意义。
- 数据集介绍:详细介绍数据集的来源、规模、标注格式等。
- 模型选择与配置:说明选择的模型及其配置参数。
- 训练过程:记录训练过程中的损失变化、学习率调整等。
- 评估结果:展示模型在验证集上的性能指标(如mAP、准确率)。
- 可视化结果:提供一些典型样本的检测结果可视化图。
- 结论与讨论:总结实验结果,讨论可能的改进方向。
- 附录:包含代码片段、图表等补充材料。
数据增强
由于数据集规模适中,可以考虑使用数据增强技术来增加训练集的多样性,从而提高模型的泛化能力。可以使用的数据增强技术包括但不限于:
- 随机旋转和裁剪
- 随机水平翻转
- 随机颜色变换
依赖库
确保安装了以下依赖库:
pip install torch torchvision
pip install -r yolov5/requirements.txt总结
这个矿场工程车检测数据集提供了丰富的标注数据,非常适合用于训练和评估工程车辆检测模型。通过YOLOv5框架,可以方便地构建和训练高性能的目标检测模型。实验报告可以帮助你更好地理解和分析模型的表现,并为进一步的研究提供参考。由于数据集规模适中,建议在训练过程中使用数据增强技术以提高模型的泛化能力。
二,垃圾车 渣土车数据集 3450张 yolo格式、voc格式 yolo格式、voc格式,直接训练

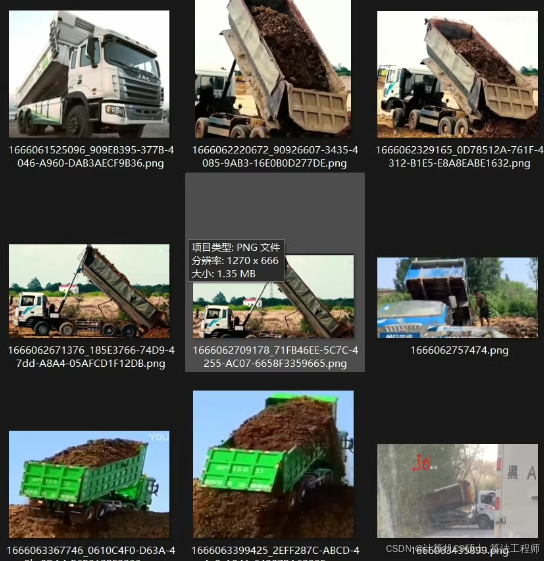
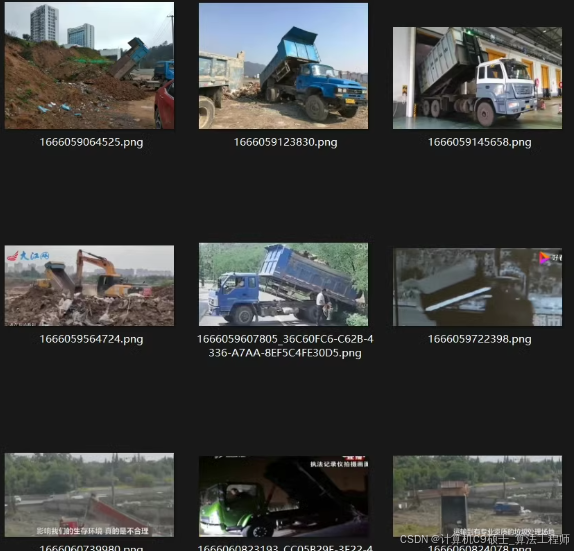
垃圾车 渣土车数据集】 数据集中包含垃圾车、渣土车目标框,可用于垃圾车、渣土车目标检测; ***真人标注,保证标注质量; 共有图片数据3450张,已划分好训练集2911和测试集539; 已处理成yolo格式、voc格式,可直接用于训练; 标签类别集标签个数:
mucktruck:5039;
垃圾车与渣土车检测数据集介绍
数据集概述
此数据集专为垃圾车与渣土车检测设计,包含了两种常见车辆类型的高清图像及相应的标注文件。数据集涵盖了这两种车辆的详细位置标注,适用于基于YOLO或VOC格式的目标检测算法模型训练。
数据集特点
- 高清影像:所有图像均为高清影像,适合用于精确的目标检测。
- 详细标注:每张图像都由真人标注了不同车辆的位置,可以用于训练模型来识别这些车辆。
- 多样性:涵盖了不同场景下的垃圾车与渣土车,适用于多种环境下的应用。
- 直接可用性:数据集已按照标准YOLO和VOC格式标注,无需进一步处理即可直接用于模型训练。
- 单类别:数据集中标注了一种类别(渣土车),适合进行单一目标检测任务。
数据集统计
| 车辆类型 | 图片数量 | 标注个数 |
|---|---|---|
| Mucktruck | 3,450 | 5,039 |
| 总计 | 3,450 | 5,039 |
数据集划分
- 训练集:2,911张图片
- 测试集:539张图片
数据集结构
TrashAndMuckTruckDetectionDataset/
├── images/ # 图像文件
│ ├── train/ # 训练集图像
│ │ ├── image_00001.jpg
│ │ ├── image_00002.jpg
│ │ └── ...
│ └── test/ # 测试集图像
│ ├── image_00001.jpg
│ ├── image_00002.jpg
│ └── ...
└── labels/ # YOLO/VOC格式标注文件夹
├── train/ # 训练集标签
│ ├── image_00001.txt
│ ├── image_00002.txt
│ └── ...
└── test/ # 测试集标签
├── image_00001.txt
├── image_00002.txt
└── ...标注格式示例
YOLO格式
每行表示一个物体的边界框和类别:
class_id cx cy w hclass_id:类别ID(从0开始编号)- 0:
Mucktruck
- 0:
cx:目标框中心点x坐标 / 图像宽度。cy:目标框中心点y坐标 / 图像高度。w:目标框宽度 / 图像宽度。h:目标框高度 / 图像高度。
例如:
0 0.453646 0.623148 0.234375 0.461111VOC格式
每个XML文件表示一张图像中的多个物体的边界框和类别:
<annotation>
<folder>TrashAndMuckTruckDetectionDataset</folder>
<filename>image_00001.jpg</filename>
<path>/path/to/image_00001.jpg</path>
<source>
<database>The VOC2007 Database</database>
<annotation>PASCAL VOC2007</annotation>
<image>flickr</image>
</source>
<size>
<width>640</width>
<height>480</height>
<depth>3</depth>
</size>
<segmented>0</segmented>
<object>
<name>Mucktruck</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>140</xmin>
<ymin>120</ymin>
<xmax>320</xmax>
<ymax>240</ymax>
</bndbox>
</object>
</annotation>使用该数据集进行模型训练
1. 数据预处理与加载
首先,我们需要加载数据并将其转换为适合YOLOv5等模型使用的格式。假设你已经安装了PyTorch和YOLOv5。
import os
from PIL import Image
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
class TrashAndMuckTruckDetectionDataset(Dataset):
def __init__(self, image_dir, label_dir, transform=None):
self.image_dir = image_dir
self.label_dir = label_dir
self.transform = transform
self.image_files = [f for f in os.listdir(image_dir) if f.endswith('.jpg')]
def __len__(self):
return len(self.image_files)
def __getitem__(self, idx):
img_name = self.image_files[idx]
img_path = os.path.join(self.image_dir, img_name)
label_path = os.path.join(self.label_dir, img_name.replace('.jpg', '.txt'))
# 加载图像
image = Image.open(img_path).convert('RGB')
if self.transform:
image = self.transform(image)
# 加载标注
with open(label_path, 'r') as file:
lines = file.readlines()
boxes = []
labels = []
for line in lines:
class_id, cx, cy, w, h = map(float, line.strip().split())
xmin = (cx - w / 2) * image.width
ymin = (cy - h / 2) * image.height
xmax = (cx + w / 2) * image.width
ymax = (cy + h / 2) * image.height
boxes.append([xmin, ymin, xmax, ymax])
labels.append(int(class_id))
boxes = torch.tensor(boxes, dtype=torch.float32)
labels = torch.tensor(labels, dtype=torch.int64)
return image, boxes, labels
# 数据增强
transform = transforms.Compose([
transforms.RandomHorizontalFlip(), # 随机水平翻转
transforms.RandomRotation(10), # 随机旋转
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1), # 随机颜色变换
transforms.Resize((640, 640)),
transforms.ToTensor(),
])
# 创建数据集
train_dataset = TrashAndMuckTruckDetectionDataset(image_dir='TrashAndMuckTruckDetectionDataset/images/train/', label_dir='TrashAndMuckTruckDetectionDataset/labels/train/', transform=transform)
test_dataset = TrashAndMuckTruckDetectionDataset(image_dir='TrashAndMuckTruckDetectionDataset/images/test/', label_dir='TrashAndMuckTruckDetectionDataset/labels/test/', transform=transform)
train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True, num_workers=4)
test_loader = DataLoader(test_dataset, batch_size=4, shuffle=False, num_workers=4)2. 构建模型
我们可以使用YOLOv5模型进行目标检测任务。假设你已经克隆了YOLOv5仓库,并按照其文档进行了环境设置。
git clone https://github.com/ultralytics/yolov5
cd yolov5
pip install -r requirements.txt创建数据配置文件 data/trash_and_muck_truck_detection.yaml:
train: path/to/TrashAndMuckTruckDetectionDataset/images/train
test: path/to/TrashAndMuckTruckDetectionDataset/images/test
nc: 1 # 类别数
names: ['Mucktruck']3. 训练模型
使用YOLOv5进行训练。
python train.py --img 640 --batch 16 --epochs 100 --data data/trash_and_muck_truck_detection.yaml --weights yolov5s.pt --cache4. 评估模型
在测试集上评估模型性能。
python val.py --img 640 --batch 16 --data data/trash_and_muck_truck_detection.yaml --weights runs/train/exp/weights/best.pt --task test5. 推理
使用训练好的模型进行推理。
python detect.py --source path/to/test/image.jpg --weights runs/train/exp/weights/best.pt --conf 0.5实验报告
实验报告应包括以下内容:
- 项目简介:简要描述项目的背景、目标和意义。
- 数据集介绍:详细介绍数据集的来源、规模、标注格式等。
- 模型选择与配置:说明选择的模型及其配置参数。
- 训练过程:记录训练过程中的损失变化、学习率调整等。
- 评估结果:展示模型在测试集上的性能指标(如mAP、准确率)。
- 可视化结果:提供一些典型样本的检测结果可视化图。
- 结论与讨论:总结实验结果,讨论可能的改进方向。
- 附录:包含代码片段、图表等补充材料。
数据增强
由于数据集规模适中,可以考虑使用数据增强技术来增加训练集的多样性,从而提高模型的泛化能力。可以使用的数据增强技术包括但不限于:
- 随机旋转和裁剪
- 随机水平翻转
- 随机颜色变换
依赖库
确保安装了以下依赖库:
pip install torch torchvision
pip install -r yolov5/requirements.txt总结
这个垃圾车与渣土车检测数据集提供了丰富的标注数据,非常适合用于训练和评估车辆检测模型。通过YOLOv5框架,可以方便地构建和训练高性能的目标检测模型。实验报告可以帮助你更好地理解和分析模型的表现,并为进一步的研究提供参考。由于数据集规模适中,建议在训练过程中使用数据增强技术以提高模型的泛化能力。

















 298
298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









