






通用机器人公司傅利叶正式推出开源人形机器人Fourier N1,同步开放包含物料清单、设计图纸、装配指南和基础操作软件在内的完整资源包。这款高1.3米、重38kg的机器人续航时间达2小时,将为全球机器人开发者提供开放的研发平台。
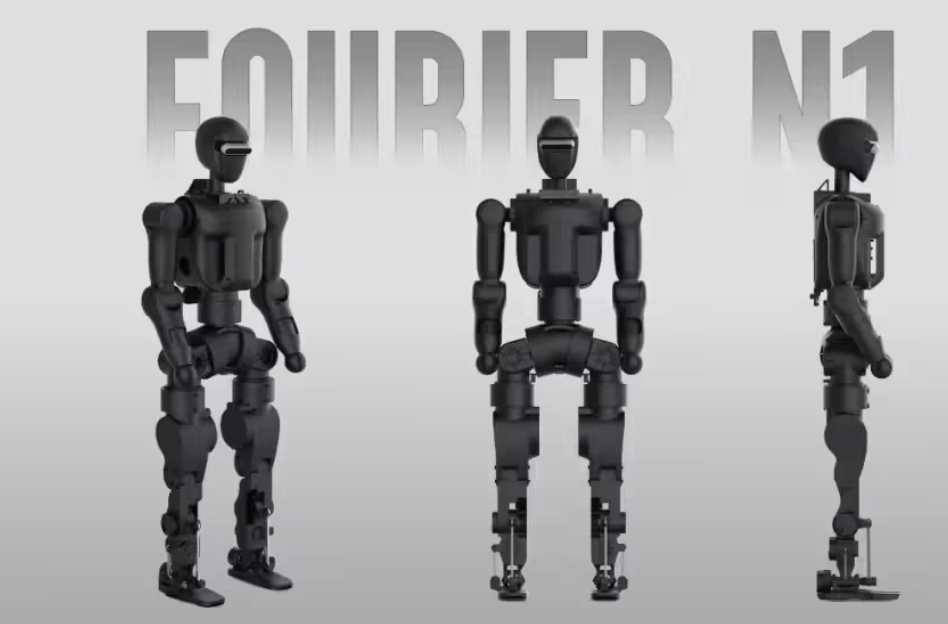
Fourier N1作为傅利叶"Nexus开源生态矩阵"的首个落地项目,在设计上强调模块化和可扩展性。机器人采用仿生关节设计,全身配备31个自由度,运动灵活性接近人类。其核心控制器运行频率达1kHz,能够实现精确的运动控制。内置的双目视觉系统和多模态传感器为环境感知提供支持,满足各类具身智能算法的验证需求。
技术团队在N1的研发过程中攻克了多项难题。轻量化设计使得机器人在保持结构强度的同时将重量控制在38kg;优化的能源管理系统让续航时间达到2小时;开放的软件架构支持ROS和Gazebo等主流机器人开发工具。这些特性使N1成为理想的科研平台。
傅利叶公司表示,开源策略旨在加速具身智能技术的发展。通过提供完整的硬件设计方案和基础软件,研究者可以专注于高泛用性运动控制、多模态模型融合等前沿领域的创新。这种开放协作的模式有望缩短技术研发周期,推动人形机器人早日实现商业化应用。
N1的发布引起学术界和产业界的广泛关注。其开放的本体资源包包含详细的机械结构图纸、电路设计图和BOM清单,开发者可以根据需求进行修改或二次开发。配套提供的SDK支持Python和C++等编程语言,便于算法验证和功能扩展。
N1展现出良好的平衡性和适应性。测试数据显示,机器人能够完成行走、上下楼梯、物品抓取等基础动作。其关节扭矩密度达到15Nm/kg,响应时间小于10ms,为复杂动作的实现提供了硬件基础。开发者可以通过调整控制参数来优化运动表现。
傅利叶的"Nexus开源生态矩阵"计划还包括后续的技术支持和社区建设。公司将定期更新算法库和开发工具,组织线上线下的技术交流活动,促进开发者之间的协作。这种开放的生态模式有望吸引更多研究机构和企业参与人形机器人技术的创新。
业内专家认为,N1的开源策略具有前瞻性。当前人形机器人研发面临高门槛,开放的技术平台可以降低参与难度,汇聚全球智慧。特别是在运动控制、环境交互等关键领域,多样化的研究思路可能带来突破性进展。
N1平台将主要服务于科研机构和高校实验室。其开放特性允许研究者快速验证新算法,而不必从头构建硬件系统。N1也可作为机器人专业的教学平台,帮助学生理解人形机器人的核心技术。
傅利叶公司透露,未来将基于社区反馈持续优化N1平台。计划增加更多的传感器接口,提升计算性能,并完善开发文档。随着生态的成熟,开源模式可能催生出一系列创新应用,推动人形机器人技术向实用化迈进。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









