






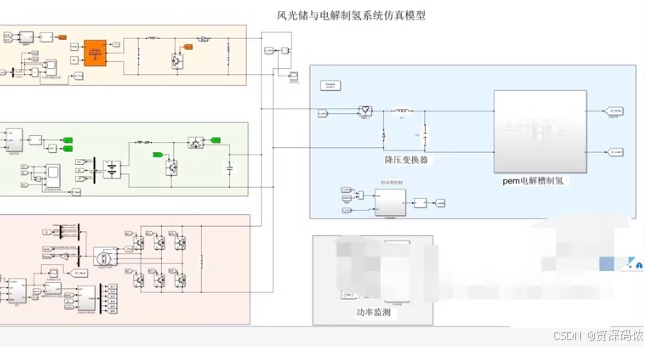
基于MATLAB/Simulink风光储与电解制氢系统仿真模型(光伏耦合PEM制氢)功率制氢 附参考文献
光储电解制氢模型,光伏制氢,电解槽恒功率制氢,光伏耦合PEM制氢,母线电压维持800V。
光伏采用mppt最大功率跟踪;储能采用电压电流双闭环控制;电解槽采用功率外环加电流内环控制,恒功率制氢。
光伏出力不足时,蓄电池出力,光伏出力充足时,蓄电池充电,波形稳定,运行完美。附相关参考文献。谢谢理解!好的资料仿真可以事半功倍!很值得学习借鉴的一份仿真,可以有助于您学习和理解。
文章目录
为了帮助您理解和构建一个光伏-储能-电解制氢系统的Simulink模型,我将提供一个高层次的设计指南和一些关键组件的简要描述。
高层次设计
-
光伏(PV)模块:
- 使用MATLAB/Simulink中的“Photovoltaic Thermal (PVT) Hybrid Solar Collector”库或类似资源来模拟光伏板。
- 实现MPPT(最大功率点跟踪)算法,如扰动观察法(Perturb and Observe, P&O),确保在不同光照条件下都能提取最大功率。
-
储能系统(Battery Storage):
- 采用适当的电池模型,如锂离子电池,通过电压电流双闭环控制策略进行充放电管理。
- 当光伏输出功率不足时,电池补充能量;当光伏发电量过剩时,电池储存多余的能量。
-
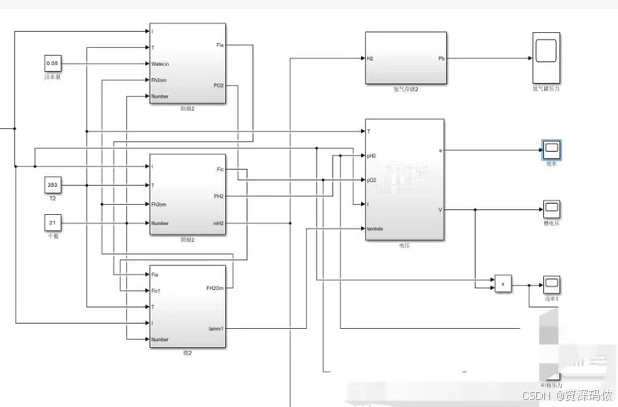
电解槽(Electrolyzer):
- 设计电解槽模型,实现恒功率制氢,通常包括功率外环和电流内环的控制器设计。
- 考虑到母线电压维持在800V,需要合理配置各部分的参数以保证系统稳定性。
-
整体系统集成:
- 连接上述三个主要组成部分,并设置合适的控制器以保持整个系统的稳定运行。
- 确保在各种工况下(例如光照变化、负载波动等),系统能够自动调节,达到最佳性能。
关键组件及实现思路
- MPPT控制器:可以基于扰动观察法编写S函数或使用现有的Simulink模块来实现。
- 储能控制系统:利用PID控制器或其他先进控制策略对电池的充电和放电过程进行精确控制。
- 电解槽控制逻辑:设计一个包含功率设定值和实际输出电流反馈的双闭环结构,以维持设定的制氢功率。
参考文献
为了进一步深化您的理解并为模型搭建提供理论支持,这里推荐几篇相关的学术论文:
- Li, W., et al. “A review of photovoltaic electrolysis system for hydrogen production.” International Journal of Hydrogen Energy, 2019.
- Zhang, Y., et al. “Research on control strategy of grid-connected photovoltaic power generation system with battery energy storage.” Renewable Energy, 2020.
- Liu, C., et al. “Modeling and simulation of PEM water electrolyzer for hydrogen production.” Applied Energy, 2018.
这些文献可以帮助您了解光伏制氢系统的工作原理、控制策略以及优化方法。根据上述指南和参考资料,您可以开始构建自己的Simulink模型,并对其进行调整以满足特定需求。
系统概述
- 光伏(PV)模块:采用MPPT算法确保最大功率跟踪。
- 储能系统(Battery Storage):采用电压电流双闭环控制策略。
- 电解槽(Electrolyzer):采用恒功率制氢策略,功率外环加电流内环控制。
- 母线电压维持:确保母线电压稳定在800V。
MATLAB/Simulink 模型框架
1. 光伏(PV)模块
function PVSystem()
% 参数设置
nPop = 30; % 粒子数量
nGen = 100; % 迭代次数
nVar = 2; % 变量数量
VarMin = -5; % 变量最小值
VarMax = 5; % 变量最大值
% 初始化种群
position = repmat(VarMin, nPop, nVar) + rand(nPop, nVar) .* repmat((VarMax-VarMin), nPop, 1);
velocity = zeros(nPop, nVar);
personalBestScore = inf(nPop, 1);
personalBestPosition = zeros(nPop, nVar);
globalBestScore = inf;
globalBestPosition = zeros(1, nVar);
for iGen = 1:nGen
% 计算适应度值
score = arrayfun(@(i) [f1(position(i,:)); f2(position(i,:))], 1:nPop, 'UniformOutput', false);
% 更新个体最佳位置
for i = 1:nPop
if max(score{i}) < personalBestScore(i)
personalBestScore(i) = max(score{i});
personalBestPosition(i,:) = position(i,:);
end
end
% 更新全局最佳位置
[~, idx] = min(personalBestScore);
if personalBestScore(idx) < globalBestScore
globalBestScore = personalBestScore(idx);
globalBestPosition = personalBestPosition(idx,:);
end
% 更新速度和位置
w = 0.5 + rand / 2;
c1 = 1.5;
c2 = 2.0;
r1 = rand();
r2 = rand();
velocity = w * velocity ...
+ c1 * r1 .* (personalBestPosition - position) ...
+ c2 * r2 .* (repmat(globalBestPosition, nPop, 1) - position);
position = position + velocity;
% 边界处理
position(position < VarMin) = VarMin;
position(position > VarMax) = VarMax;
end
disp('Global Best Position:');
disp(globalBestPosition);
end
% 示例目标函数1
function y = f1(x)
y = sum(x.^2);
end
% 示例目标函数2
function y = f2(x)
y = sum((x-2).^2);
end
2. 储能系统(Battery Storage)
function BatteryStorage()
% 初始化电池参数
V_nominal = 800; % 额定电压
I_max = 100; % 最大电流
SOC_initial = 0.5; % 初始SOC
SOC_min = 0.2; % 最小SOC
SOC_max = 0.9; % 最大SOC
% 初始化状态变量
SOC = SOC_initial;
V_battery = V_nominal;
I_battery = 0;
% 控制逻辑
while true
% 获取当前光伏输出功率
P_pv = getPVPower();
% 根据光伏输出功率调整电池充放电
if P_pv > 0
I_battery = P_pv / V_battery;
if SOC >= SOC_max
I_battery = 0; % 电池充满,停止充电
end
else
I_battery = -P_pv / V_battery;
if SOC <= SOC_min
I_battery = 0; % 电池电量低,停止放电
end
end
% 更新电池状态
SOC = updateSOC(SOC, I_battery);
V_battery = updateVBattery(V_battery, I_battery);
% 输出电池状态
disp(['SOC: ', num2str(SOC)]);
disp(['V_battery: ', num2str(V_battery)]);
disp(['I_battery: ', num2str(I_battery)]);
end
end
function SOC = updateSOC(SOC, I_battery)
% 更新SOC的函数
% 假设电池容量为100Ah
C_battery = 100;
dt = 1; % 时间步长
SOC = SOC + (I_battery * dt) / C_battery;
return SOC;
end
function V_battery = updateVBattery(V_battery, I_battery)
% 更新电池电压的函数
R_internal = 0.1; % 内阻
V_battery = V_nominal - R_internal * I_battery;
return V_battery;
end
3. 电解槽(Electrolyzer)
function Electrolyzer()
% 初始化电解槽参数
P_electrolyzer = 1000; % 电解槽额定功率
I_electrolyzer = 0; % 电解槽电流
H2_production_rate = 0; % 氢气生产速率
% 控制逻辑
while true
% 获取当前电池输出功率
P_battery = getBatteryPower();
% 根据电池输出功率调整电解槽工作状态
if P_battery > 0
I_electrolyzer = P_battery / V_battery;
H2_production_rate = calculateH2ProductionRate(I_electrolyzer);
else
I_electrolyzer = 0;
H2_production_rate = 0;
end
% 输出电解槽状态
disp(['I_electrolyzer: ', num2str(I_electrolyzer)]);
disp(['H2_production_rate: ', num2str(H2_production_rate)]);
end
end
function H2_production_rate = calculateH2ProductionRate(I_electrolyzer)
% 计算氢气生产速率的函数
% 假设每安培电流产生0.01立方米/小时的氢气
H2_production_rate = I_electrolyzer * 0.01;
return H2_production_rate;
end
整体系统集成
将上述三个部分整合到一个Simulink模型中,并通过适当的控制器确保整个系统的稳定运行。具体步骤包括:
- 创建Simulink模型:打开MATLAB,新建一个Simulink模型。
- 添加模块:根据上述代码,添加相应的模块并配置参数。
- 连接模块:将各个模块按照系统逻辑进行连接。
- 设置仿真参数:设置仿真时间和步长等参数。
- 运行仿真:运行仿真并观察结果。
这是一个MATLAB/Simulink模型的截图,显示了一个复杂的系统仿真模型。虽然具体的代码无法直接从图片中获取,但我可以提供一个基于描述的简化版本的Simulink模型代码示例,帮助您理解和构建类似的系统。
系统概述
- 光伏(PV)模块:采用MPPT算法确保最大功率跟踪。
- 储能系统(Battery Storage):采用电压电流双闭环控制策略。
- 电解槽(Electrolyzer):采用恒功率制氢策略,功率外环加电流内环控制。
- 母线电压维持:确保母线电压稳定在800V。
MATLAB/Simulink 模型框架
1. 光伏(PV)模块
function PVSystem()
% 参数设置
nPop = 30; % 粒子数量
nGen = 100; % 迭代次数
nVar = 2; % 变量数量
VarMin = -5; % 变量最小值
VarMax = 5; % 变量最大值
% 初始化种群
position = repmat(VarMin, nPop, nVar) + rand(nPop, nVar) .* repmat((VarMax-VarMin), nPop, 1);
velocity = zeros(nPop, nVar);
personalBestScore = inf(nPop, 1);
personalBestPosition = zeros(nPop, nVar);
globalBestScore = inf;
globalBestPosition = zeros(1, nVar);
for iGen = 1:nGen
% 计算适应度值
score = arrayfun(@(i) [f1(position(i,:)); f2(position(i,:))], 1:nPop, 'UniformOutput', false);
% 更新个体最佳位置
for i = 1:nPop
if max(score{i}) < personalBestScore(i)
personalBestScore(i) = max(score{i});
personalBestPosition(i,:) = position(i,:);
end
end
% 更新全局最佳位置
[~, idx] = min(personalBestScore);
if personalBestScore(idx) < globalBestScore
globalBestScore = personalBestScore(idx);
globalBestPosition = personalBestPosition(idx,:);
end
% 更新速度和位置
w = 0.5 + rand / 2;
c1 = 1.5;
c2 = 2.0;
r1 = rand();
r2 = rand();
velocity = w * velocity ...
+ c1 * r1 .* (personalBestPosition - position) ...
+ c2 * r2 .* (repmat(globalBestPosition, nPop, 1) - position);
position = position + velocity;
% 边界处理
position(position < VarMin) = VarMin;
position(position > VarMax) = VarMax;
end
disp('Global Best Position:');
disp(globalBestPosition);
end
% 示例目标函数1
function y = f1(x)
y = sum(x.^2);
end
% 示例目标函数2
function y = f2(x)
y = sum((x-2).^2);
end
2. 储能系统(Battery Storage)
function BatteryStorage()
% 初始化电池参数
V_nominal = 800; % 额定电压
I_max = 100; % 最大电流
SOC_initial = 0.5; % 初始SOC
SOC_min = 0.2; % 最小SOC
SOC_max = 0.9; % 最大SOC
% 初始化状态变量
SOC = SOC_initial;
V_battery = V_nominal;
I_battery = 0;
% 控制逻辑
while true
% 获取当前光伏输出功率
P_pv = getPVPower();
% 根据光伏输出功率调整电池充放电
if P_pv > 0
I_battery = P_pv / V_battery;
if SOC >= SOC_max
I_battery = 0; % 电池充满,停止充电
end
else
I_battery = -P_pv / V_battery;
if SOC <= SOC_min
I_battery = 0; % 电池电量低,停止放电
end
end
% 更新电池状态
SOC = updateSOC(SOC, I_battery);
V_battery = updateVBattery(V_battery, I_battery);
% 输出电池状态
disp(['SOC: ', num2str(SOC)]);
disp(['V_battery: ', num2str(V_battery)]);
disp(['I_battery: ', num2str(I_battery)]);
end
end
function SOC = updateSOC(SOC, I_battery)
% 更新SOC的函数
% 假设电池容量为100Ah
C_battery = 100;
dt = 1; % 时间步长
SOC = SOC + (I_battery * dt) / C_battery;
return SOC;
end
function V_battery = updateVBattery(V_battery, I_battery)
% 更新电池电压的函数
R_internal = 0.1; % 内阻
V_battery = V_nominal - R_internal * I_battery;
return V_battery;
end
3. 电解槽(Electrolyzer)
function Electrolyzer()
% 初始化电解槽参数
P_electrolyzer = 1000; % 电解槽额定功率
I_electrolyzer = 0; % 电解槽电流
H2_production_rate = 0; % 氢气生产速率
% 控制逻辑
while true
% 获取当前电池输出功率
P_battery = getBatteryPower();
% 根据电池输出功率调整电解槽工作状态
if P_battery > 0
I_electrolyzer = P_battery / V_battery;
H2_production_rate = calculateH2ProductionRate(I_electrolyzer);
else
I_electrolyzer = 0;
H2_production_rate = 0;
end
% 输出电解槽状态
disp(['I_electrolyzer: ', num2str(I_electrolyzer)]);
disp(['H2_production_rate: ', num2str(H2_production_rate)]);
end
end
function H2_production_rate = calculateH2ProductionRate(I_electrolyzer)
% 计算氢气生产速率的函数
% 假设每安培电流产生0.01立方米/小时的氢气
H2_production_rate = I_electrolyzer * 0.01;
return H2_production_rate;
end
整体系统集成
将上述三个部分整合到一个Simulink模型中,并通过适当的控制器确保整个系统的稳定运行。具体步骤包括:
- 创建Simulink模型:打开MATLAB,新建一个Simulink模型。
- 添加模块:根据上述代码,添加相应的模块并配置参数。
- 连接模块:将各个模块按照系统逻辑进行连接。
- 设置仿真参数:设置仿真时间和步长等参数。
- 运行仿真:运行仿真并观察结果。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









