







在计算机视觉领域,双目立体视觉一直扮演着至关重要的角色。它模拟人类双眼的视觉机制,通过两个参数和型号完全相同的相机来感知三维世界。
一、双目立体视觉模型基础
双目立体视觉模型由两个相机构成,这两个相机的参数和型号完全一致,并且它们的光轴始终保持平行,就如同我们人类的双眼一样,协同工作来感知深度信息。在这一模型中,左视角相机的坐标系轴分别用 、
、
来表示,而
则是左视角相机的光心,同时也是坐标系的原点。同样的原理适用于右视角相机。
值得注意的是,基线长度 B 是两个相机光心之间的距离,它直接关系到立体视觉系统的深度感知能力。焦距 f 则表示从相机光心到成像平面的距离,这两个参数(B 和 f)都可以通过测量和相机标定等方法准确获得。
二、深度信息的获取原理
假设空间中存在一个点 P(X,Y,Z),当它经过左视角相机拍摄后,会在成像平面上留下一个对应的点 。在左视角相机坐标系下,
的坐标为(
,
,
)。同样的,右视角相机也会有一个对应的成像点
。
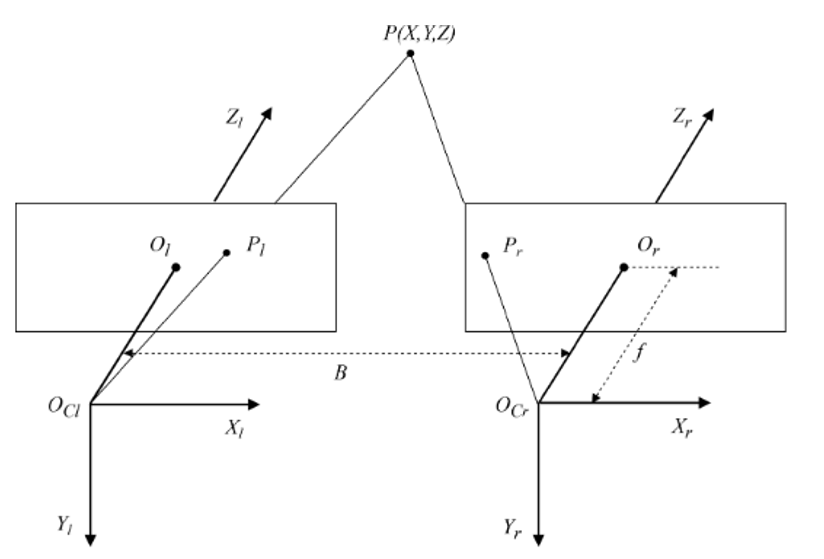
根据三角形相似原理,和
之间的连线平行于
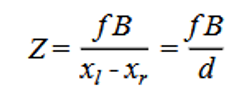
轴,它们之间的差值能够反映出两个图像点之间的相对关系。由于 f 和 B 已知,只要计算出该点在左右两个成像平面上的成像点所对应的
和
的差值,即视差值 d,就能够准确计算出三维世界点的深度信息 Z。
三、成像模型的分类与特点
-
线性成像模型(小孔成像模型) 在理想状态下,物体成像可以通过简单的小孔成像来实现。当光线照射到物体表面时,物体上的每一个点都会通过小孔投射到成像平面上。由于光线的直线传播特性,在成像平面上的物体呈现倒立状态。这种小孔成像模型虽然简单,但却能够较为准确地反映物体的几何形状和位置关系,是计算机视觉领域许多算法的基础。
-
非线性成像模型(透镜成像模型) 为了满足在不同光照条件下快速曝光的需求,镜头制造商将镜头设计成面积较大且弯曲的透镜。这样做的目的是增加进光量和减少曝光时间,能够在极短的时间内通过较多的光线。然而,这种透镜设计虽然解决了透光不足的问题,但也带来了镜头畸变问题,导致成像不符合线性关系,降低了成像质量。
四、摄像头畸变的类型与校正
-
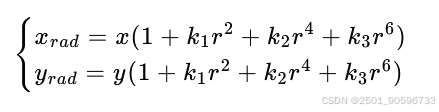
径向畸变 径向畸变是由于每个点的曲率不一致所导致的。光线在远离透镜中心的区域比靠近中心的区域更加弯曲,从而使得成像点在径向位置上发生了偏移。而且,当成像点离成像中心距离越远时,畸变影响越大。通过一些参数和公式,可以有效地校正径向畸变,恢复图像的真实形状。
-
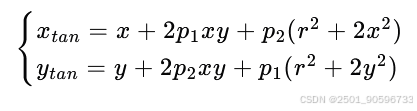
切向畸变 由于相机的透镜与成像平面可能不平行,会导致切向畸变。这种畸变同样会对成像质量产生影响,使得成像点发生偏移。为了消除切向畸变,可以对这些畸变参数的测量和校正,最大程度地消除摄像头的畸变影响,从而得到每个像素点的实际成像位置,提高图像的准确性和可靠性。
PS:亲爱的读者朋友们,大家好!首先非常感谢您抽出宝贵的时间阅读我的这篇博客。我想在此特别说明一下,这篇博客仅仅是我在个人学习、探索以及实践过程中的一个记录。我深知自己并非该领域的绝对专家,知识水平和实践经验都有限。因此,我不能确保博客中所提及的所有信息、观点和方法都真实和准确。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









