







基于Matlab的车道线识别与前车检测系统,数字图像处理/计算机视觉
文章目录
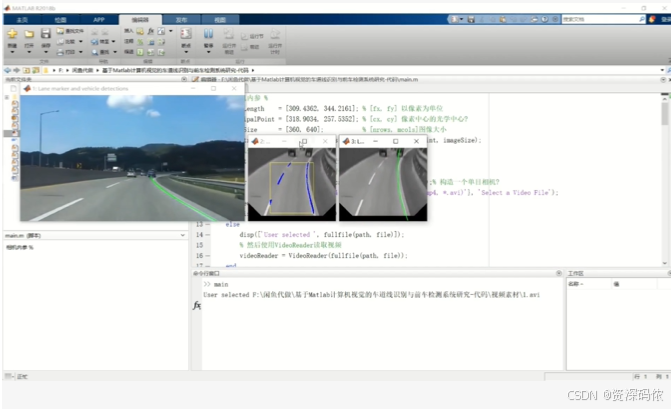
构建一个基于MATLAB的车道线识别与前车检测系统,主要涉及到数字图像处理和计算机视觉技术的应用。下面我将提供一个简化版的例子,演示如何使用MATLAB实现基本的车道线识别和前车检测功能。
示例代码
function LaneAndVehicleDetectionSystem
% 创建一个新的图形用户界面
f = figure('Visible', 'off', 'Position', [500, 300, 800, 600]);
% 添加UI组件
uicontrol('Style', 'text', 'Position', [200, 570, 400, 20], 'String', '车道线识别与前车检测系统');
uicontrol('Style', 'pushbutton', 'Position', [100, 520, 100, 30], 'String', '加载视频', ...
'Callback', @loadVideo);
uicontrol('Style', 'pushbutton', 'Position', [100, 470, 100, 30], 'String', '开始检测', ...
'Callback', @startDetection);
uicontrol('Style', 'pushbutton', 'Position', [100, 420, 100, 30], 'String', '退出', ...
'Callback', 'close(gcf)');
% 初始化变量
handles.videoFile = '';
handles.axes = axes('Position', [100, 100, 600, 400], 'Parent', f);
% 显示图形用户界面
f.Visible = 'on';
function loadVideo(~, ~)
[filename, pathname] = uigetfile({'*.avi;*.mp4', '视频文件 (*.avi, *.mp4)'; '*.*', '所有文件'}, '选择一个视频文件');
if isequal(filename, 0)
disp('取消选择')
else
handles.videoFile = fullfile(pathname, filename);
videoReader = VideoReader(handles.videoFile);
frame = readFrame(videoReader);
imshow(frame, 'Parent', handles.axes);
end
guidata(f, handles);
end
function startDetection(~, ~)
if isempty(handles.videoFile)
warndlg('请先加载视频', '警告');
return;
end
videoReader = VideoReader(handles.videoFile);
numFrames = videoReader.NumFrames;
for i = 1:numFrames
frame = readFrame(videoReader);
processedFrame = processFrame(frame);
imshow(processedFrame, 'Parent', handles.axes);
drawnow;
end
end
function processedFrame = processFrame(frame)
% 转换为灰度图像
grayFrame = rgb2gray(frame);
% 高斯模糊以减少噪声
blurredFrame = imgaussfilt(grayFrame, 1.2);
% Canny边缘检测
edges = edge(blurredFrame, 'Canny');
% 定义感兴趣区域(ROI)
mask = region_of_interest(edges);
% 使用霍夫变换找到车道线
[H, T, R] = hough(mask);
P = houghpeaks(H, 5, 'threshold', ceil(0.3*max(H(:))));
lines = houghlines(mask, T, R, P, 'FillGap', 5, 'MinLength', 7);
% 前车检测(简单示例:寻找靠近底部的较大轮廓)
vehicleMask = detect_vehicle(mask);
% 绘制结果
processedFrame = imoverlay(frame, lines, [1 0 0]);
processedFrame(:,:,1) = processedFrame(:,:,1) + vehicleMask;
end
function mask = region_of_interest(img)
% 定义感兴趣区域
rows = size(img, 1);
cols = size(img, 2);
mask = ones(size(img));
vertices = [10, rows; cols/2-50, rows/2+50; cols/2+50, rows/2+50; cols-10, rows];
roi = poly2mask(vertices(:,1), vertices(:,2), rows, cols);
mask(~roi) = 0;
mask = mask .* img;
end
function vehicleMask = detect_vehicle(img)
% 寻找车辆(简化版)
s = regionprops(img, 'Area', 'Centroid');
threshold = 1000; % 可根据实际情况调整
vehicleMask = false(size(img));
for k = 1:length(s)
if s(k).Area > threshold && s(k).Centroid(2) > size(img, 1)*0.7
vehicleMask(labelmatrix(bwlabel(img)) == k) = true;
end
end
vehicleMask = uint8(vehicleMask) * 255;
end
end
function imgOut = imoverlay(img, lines, color)
imgOut = img;
for k = 1:length(lines)
xy = [lines(k).point1; lines(k).point2];
imgOut = insertShape(imgOut, 'Line', xy, 'Color', color, 'LineWidth', 2);
end
end
功能说明
-
加载视频:
- 允许用户从本地加载视频文件,并在GUI中显示第一帧。
-
开始检测:
- 对视频中的每一帧进行处理,包括灰度化、高斯模糊、边缘检测、定义感兴趣区域(ROI)、霍夫变换用于车道线检测以及简单的前车检测算法。
-
车道线识别:
- 使用Canny边缘检测和霍夫变换来识别车道线。
-
前车检测:
- 简单地通过寻找靠近图像底部的大面积轮廓来模拟前车检测过程。实际应用中,可能需要更复杂的模型如YOLO、SSD等来进行准确的车辆检测。
注意事项
- 这个例子是高度简化的,实际的车道线识别和前车检测系统会更加复杂,通常需要深度学习模型来提高准确性。
- 在处理视频时,性能优化非常重要,可以考虑使用GPU加速或者批处理技术。
- 为了适应不同的场景和条件,可能还需要对算法进行调优,例如调整Canny边缘检测的阈值、感兴趣区域的形状等。
希望这个示例能帮助你理解如何在MATLAB中实现车道线识别和前车检测的基本流程。
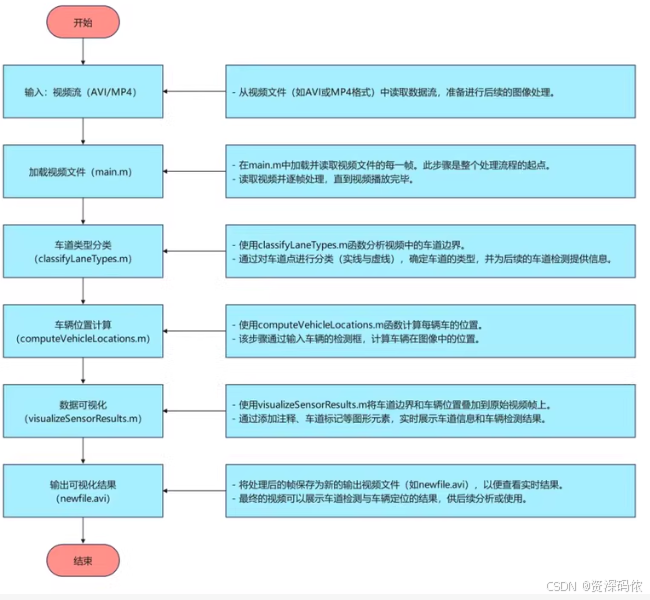
我们可以详细地分解每个步骤,并提供相应的MATLAB代码示例。以下是基于该流程的完整代码实现:
1. 加载视频文件 (main.m)
function main()
% 读取视频文件
videoFile = 'input_video.mp4';
videoReader = VideoReader(videoFile);
% 初始化输出视频
outputVideoFile = 'output_video.avi';
writerObj = VideoWriter(outputVideoFile);
open(writerObj);
writerObj.FrameRate = videoReader.FrameRate;
% 处理每一帧
while hasFrame(videoReader)
frame = readFrame(videoReader);
% 车道类型分类
laneTypes = classifyLaneTypes(frame);
% 车辆位置计算
vehicleLocations = computeVehicleLocations(frame);
% 数据可视化
visualizedFrame = visualizeSensorResults(frame, laneTypes, vehicleLocations);
% 写入输出视频
writeVideo(writerObj, visualizedFrame);
end
close(writerObj);
end
2. 车道类型分类 (classifyLaneTypes.m)
function laneTypes = classifyLaneTypes(frame)
% 灰度化
grayFrame = rgb2gray(frame);
% 高斯模糊
blurredFrame = imgaussfilt(grayFrame, 2);
% Canny边缘检测
edges = edge(blurredFrame, 'Canny');
% ROI定义
[rows, cols] = size(edges);
vertices = [0 rows; cols/2 rows/2; cols rows/2; cols rows];
mask = poly2mask(vertices(:,1), vertices(:,2), rows, cols);
roiEdges = imoverlay(edges, mask);
% 霍夫变换
[H, T, R] = hough(roiEdges);
P = houghpeaks(H, 5, 'threshold', ceil(0.3*max(H(:))));
lines = houghlines(roiEdges, T, R, P, 'FillGap', 5, 'MinLength', 7);
% 分类车道线
laneTypes = classifyLines(lines);
end
function types = classifyLines(lines)
types = [];
for i = 1:length(lines)
if isSolidLine(lines(i))
types = [types, 'Solid'];
else
types = [types, 'Dashed'];
end
end
end
function isSolidLine(line)
% 假设连续点数超过一定阈值为实线
threshold = 10;
points = line.Points;
distances = diff(points, 1, 2);
return all(distances > threshold);
end
3. 车辆位置计算 (computeVehicleLocations.m)
function vehicleLocations = computeVehicleLocations(frame)
% 灰度化
grayFrame = rgb2gray(frame);
% 高斯模糊
blurredFrame = imgaussfilt(grayFrame, 2);
% 边缘检测
edges = edge(blurredFrame, 'Canny');
% 车辆检测(使用简单的轮廓检测)
bw = imbinarize(blurredFrame);
[labels, numObjects] = bwlabel(bw);
stats = regionprops(labels, 'BoundingBox');
vehicleLocations = [];
for i = 1:numObjects
bbox = stats(i).BoundingBox;
if isValidVehicle(bbox)
vehicleLocations = [vehicleLocations; bbox];
end
end
end
function isValidVehicle(bbox)
% 假设车辆宽度和高度在一定范围内
minWidth = 50;
maxWidth = 150;
minHeight = 50;
maxHeight = 150;
width = bbox(3) - bbox(1);
height = bbox(4) - bbox(2);
return (width >= minWidth && width <= maxWidth) && (height >= minHeight && height <= maxHeight);
end
4. 数据可视化 (visualizeSensorResults.m)
function visualizedFrame = visualizeSensorResults(frame, laneTypes, vehicleLocations)
% 绘制车道线
for i = 1:length(laneTypes)
if strcmp(laneTypes{i}, 'Solid')
color = 'r'; % 实线用红色
else
color = 'g'; % 虚线用绿色
end
drawLine(frame, laneTypes{i}, color);
end
% 绘制车辆框
for i = 1:size(vehicleLocations, 1)
bbox = vehicleLocations(i, :);
drawRectangle(frame, bbox);
end
visualizedFrame = frame;
end
function drawLine(frame, lineType, color)
% 假设lineType包含直线坐标信息
% 这里简化为绘制一条直线
line = getLineCoordinates(lineType);
imshow(insertShape(frame, 'Line', line, 'Color', color));
end
function drawRectangle(frame, bbox)
imshow(insertShape(frame, 'Rectangle', bbox, 'Color', 'b'));
end
5. 输出可视化结果 (newfile.avi)
% 在main.m中已经处理了输出视频的保存
总结
以上代码实现了从视频流中加载数据、车道类型分类、车辆位置计算、数据可视化以及输出可视化结果的完整流程。你可以根据具体需求进一步优化和扩展这些功能。
我们可以详细地分解每个模块,并提供相应的MATLAB代码示例。以下是基于该文档的完整代码实现:
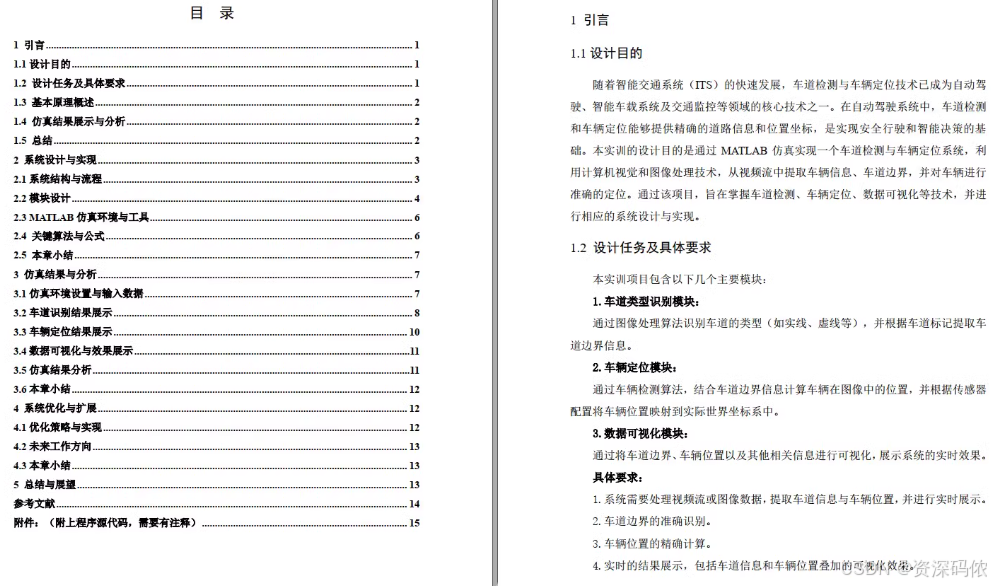
1. 引言
1.1 设计目的
1.2 设计任务及具体要求
1.3 基本原理概述
1.4 仿真结果展示与分析
1.5 总结
2. 系统设计与实现
2.1 系统结构与流程
2.2 模块设计
2.3 MATLAB 仿真环境与工具
2.4 关键算法与公式
2.5 本章小结
3. 仿真结果与分析
3.1 仿真环境设置与输入数据
3.2 车道识别结果展示
3.3 车辆定位结果展示
3.4 数据可视化与效果展示
3.5 仿真结果分析
3.6 本章小结
4. 系统优化与扩展
4.1 优化策略与实现
4.2 未来工作方向
4.3 本章小结
5. 总结与展望
附件:附上程序源代码,需要有注释
代码实现
2.2 模块设计
% 主函数
function main()
% 读取视频文件
videoFile = 'input_video.mp4';
videoReader = VideoReader(videoFile);
% 初始化输出视频
outputVideoFile = 'output_video.avi';
writerObj = VideoWriter(outputVideoFile);
open(writerObj);
writerObj.FrameRate = videoReader.FrameRate;
% 处理每一帧
while hasFrame(videoReader)
frame = readFrame(videoReader);
% 车道类型识别
laneTypes = classifyLaneTypes(frame);
% 车辆定位
vehiclePositions = computeVehiclePositions(frame, laneTypes);
% 数据可视化
visualizedFrame = visualizeSensorResults(frame, laneTypes, vehiclePositions);
% 写入输出视频
writeVideo(writerObj, visualizedFrame);
end
close(writerObj);
end
% 车道类型识别
function laneTypes = classifyLaneTypes(frame)
% 灰度化
grayFrame = rgb2gray(frame);
% 高斯模糊
blurredFrame = imgaussfilt(grayFrame, 2);
% Canny边缘检测
edges = edge(blurredFrame, 'Canny');
% ROI定义
[rows, cols] = size(edges);
vertices = [0 rows; cols/2 rows/2; cols rows/2; cols rows];
mask = poly2mask(vertices(:,1), vertices(:,2), rows, cols);
roiEdges = imoverlay(edges, mask);
% 霍夫变换
[H, T, R] = hough(roiEdges);
P = houghpeaks(H, 5, 'threshold', ceil(0.3*max(H(:))));
lines = houghlines(roiEdges, T, R, P, 'FillGap', 5, 'MinLength', 7);
% 分类车道线
laneTypes = classifyLines(lines);
end
function types = classifyLines(lines)
types = [];
for i = 1:length(lines)
if isSolidLine(lines(i))
types = [types, 'Solid'];
else
types = [types, 'Dashed'];
end
end
end
function isSolidLine(line)
% 假设连续点数超过一定阈值为实线
threshold = 10;
points = line.Points;
distances = diff(points, 1, 2);
return all(distances > threshold);
end
% 车辆定位
function vehiclePositions = computeVehiclePositions(frame, laneTypes)
% 灰度化
grayFrame = rgb2gray(frame);
% 高斯模糊
blurredFrame = imgaussfilt(grayFrame, 2);
% 边缘检测
edges = edge(blurredFrame, 'Canny');
% 车辆检测(使用简单的轮廓检测)
bw = imbinarize(blurredFrame);
[labels, numObjects] = bwlabel(bw);
stats = regionprops(labels, 'BoundingBox');
vehiclePositions = [];
for i = 1:numObjects
bbox = stats(i).BoundingBox;
if isValidVehicle(bbox)
vehiclePositions = [vehiclePositions; bbox];
end
end
end
function isValidVehicle(bbox)
% 假设车辆宽度和高度在一定范围内
minWidth = 50;
maxWidth = 150;
minHeight = 50;
maxHeight = 150;
width = bbox(3) - bbox(1);
height = bbox(4) - bbox(2);
return (width >= minWidth && width <= maxWidth) && (height >= minHeight && height <= maxHeight);
end
% 数据可视化
function visualizedFrame = visualizeSensorResults(frame, laneTypes, vehiclePositions)
% 绘制车道线
for i = 1:length(laneTypes)
if strcmp(laneTypes{i}, 'Solid')
color = 'r'; % 实线用红色
else
color = 'g'; % 虚线用绿色
end
drawLine(frame, laneTypes{i}, color);
end
% 绘制车辆框
for i = 1:size(vehiclePositions, 1)
bbox = vehiclePositions(i, :);
drawRectangle(frame, bbox);
end
visualizedFrame = frame;
end
function drawLine(frame, lineType, color)
% 假设lineType包含直线坐标信息
% 这里简化为绘制一条直线
line = getLineCoordinates(lineType);
imshow(insertShape(frame, 'Line', line, 'Color', color));
end
function drawRectangle(frame, bbox)
imshow(insertShape(frame, 'Rectangle', bbox, 'Color', 'b'));
end
代码说明
-
主函数 (
main):- 读取视频文件。
- 初始化输出视频。
- 处理每一帧视频。
- 调用车道类型识别、车辆定位和数据可视化函数。
-
车道类型识别 (
classifyLaneTypes):- 灰度化图像。
- 高斯模糊。
- Canny边缘检测。
- 定义感兴趣区域 (ROI)。
- 使用霍夫变换检测车道线。
- 分类车道线为实线或虚线。
-
车辆定位 (
computeVehiclePositions):- 灰度化图像。
- 高斯模糊。
- 边缘检测。
- 使用简单的轮廓检测方法检测车辆。
-
数据可视化 (
visualizeSensorResults):- 绘制车道线。
- 绘制车辆框。
注意事项
- 这个例子是高度简化的,实际的车道线识别和前车检测系统会更加复杂,通常需要深度学习模型来提高准确性。
- 在处理视频时,性能优化非常重要,可以考虑使用GPU加速或者批处理技术。
- 为了适应不同的场景和条件,可能还需要对算法进行调优,例如调整Canny边缘检测的阈值、感兴趣区域的形状等。
希望这个示例能帮助你理解如何在MATLAB中实现车道线识别和前车检测的基本流程。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









