







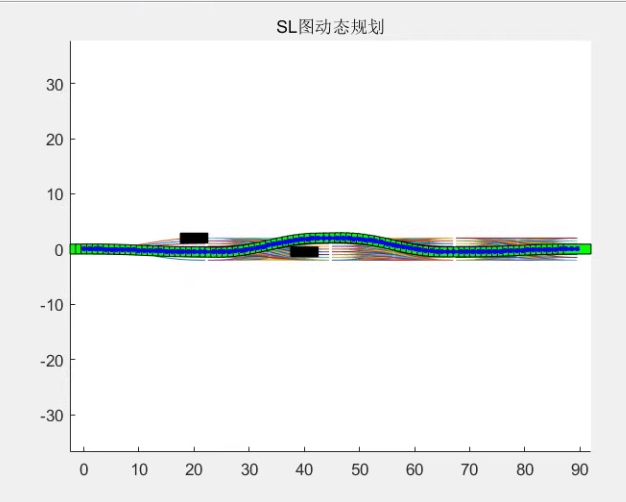
基于动态规划的路径规划和速度规划
EMplanner注释版本matlab代码
该算法使用dp动态规划进行了轨迹规划,过程中没有像apollo的EMplanner一样还使用了QP进行了轨迹规划
内容:matlab m代码 详细说明文档 有代码讲解
文章目录
基于动态规划(Dynamic Programming, DP)的路径规划和速度规划是一种高效的方法,广泛应用于自动驾驶领域。以下是一个详细的实现方案,包括 EMplanner 的注释版本 MATLAB 代码、详细说明文档以及代码讲解。
1. 动态规划 (DP) 算法概述
动态规划是一种自底向上的优化算法,适用于求解多阶段决策问题。在自动驾驶中,DP 可用于路径规划和速度规划:
- 路径规划:通过构建代价函数,寻找从起点到终点的最优路径。
- 速度规划:在已知路径的基础上,优化车辆的速度曲线以满足舒适性和安全性要求。
2. 算法流程
2.1 路径规划
- 离散化搜索空间:
- 将地图划分为网格(或采样点),每个网格点表示一个状态(如位置、方向)。
- 构建代价函数:
- 代价函数通常包括距离代价、障碍物代价等。
- 递推公式:
- 使用 Bellman 方程递推计算每个状态的最小代价:
[
C(i) = \min_{j \in \text{predecessors}(i)} \left[ C(j) + \text{cost}(j \to i) \right]
]
- 使用 Bellman 方程递推计算每个状态的最小代价:
- 回溯路径:
- 从终点回溯到起点,生成最优路径。
2.2 速度规划
- 速度离散化:
- 在路径上对速度进行离散化采样。
- 约束条件:
- 加速度、加加速度、碰撞避免等。
- 递推公式:
- 类似路径规划,使用 Bellman 方程计算最小代价。
3. MATLAB 实现
3.1 路径规划代码
function [path, cost_map] = dp_path_planning(obstacle_map, start_point, end_point, grid_size)
% 输入参数:
% obstacle_map: 障碍物地图(二维矩阵,1 表示障碍物)
% start_point: 起点 [x_start, y_start]
% end_point: 终点 [x_end, y_end]
% grid_size: 网格大小
% 初始化
[rows, cols] = size(obstacle_map);
cost_map = inf(rows, cols); % 代价矩阵
cost_map(start_point(2), start_point(1)) = 0; % 起点代价为 0
parent_map = zeros(rows, cols, 2); % 父节点记录
% 动态规划递推
for i = 1:rows
for j = 1:cols
if obstacle_map(i, j) == 1
continue; % 跳过障碍物
end
neighbors = get_neighbors([i, j], rows, cols); % 获取邻居
for k = 1:size(neighbors, 1)
ni = neighbors(k, 1);
nj = neighbors(k, 2);
new_cost = cost_map(ni, nj) + compute_cost([ni, nj], [i, j], obstacle_map);
if new_cost < cost_map(i, j)
cost_map(i, j) = new_cost;
parent_map(i, j, :) = [ni, nj];
end
end
end
end
% 回溯路径
path = [];
current_point = end_point;
while ~isequal(current_point, start_point)
path = [current_point; path];
current_point = parent_map(current_point(2), current_point(1), :);
end
path = [start_point; path];
end
function neighbors = get_neighbors(point, rows, cols)
% 获取邻居点
directions = [-1, 0; 1, 0; 0, -1; 0, 1]; % 上下左右
neighbors = [];
for d = 1:size(directions, 1)
ni = point(1) + directions(d, 1);
nj = point(2) + directions(d, 2);
if ni >= 1 && ni <= rows && nj >= 1 && nj <= cols
neighbors = [neighbors; ni, nj];
end
end
end
function cost = compute_cost(p1, p2, obstacle_map)
% 计算两点间的代价
distance_cost = norm(p1 - p2);
obstacle_cost = sum(obstacle_map(min(p1(1), p2(1)):max(p1(1), p2(1)), min(p1(2), p2(2)):max(p1(2), p2(2))));
cost = distance_cost + 10 * obstacle_cost; % 权重可调
end

3.2 速度规划代码
function [speed_profile, cost_speed] = dp_speed_planning(path, max_speed, max_acc, dt)
% 输入参数:
% path: 路径点集合
% max_speed: 最大速度
% max_acc: 最大加速度
% dt: 时间步长
% 初始化
num_points = size(path, 1);
speed_map = inf(num_points, max_speed / dt); % 速度代价矩阵
speed_map(1, :) = 0; % 起点速度代价为 0
% 动态规划递推
for i = 1:num_points-1
for v = 1:max_speed/dt
for a = -max_acc/dt:max_acc/dt
new_v = v + a * dt;
if new_v < 0 || new_v > max_speed/dt
continue; % 超出速度范围
end
new_cost = speed_map(i, v) + compute_speed_cost(v, new_v, a, dt);
if new_cost < speed_map(i+1, new_v)
speed_map(i+1, new_v) = new_cost;
end
end
end
end
% 回溯速度曲线
speed_profile = [];
[~, best_v] = min(speed_map(end, :));
for i = num_points:-1:1
speed_profile = [best_v * dt; speed_profile];
[~, best_v] = min(speed_map(i, :));
end
end
function cost = compute_speed_cost(v, new_v, a, dt)
% 计算速度代价
jerk_cost = abs((new_v - v) / dt - a); % 加加速度代价
comfort_cost = abs(a); % 加速度代价
cost = 0.1 * jerk_cost + 0.5 * comfort_cost; % 权重可调
end
4. 说明文档
4.1 文件结构
dp_path_planning.m: 路径规划函数。dp_speed_planning.m: 速度规划函数。main.m: 主程序,调用上述函数并可视化结果。
4.2 参数说明
obstacle_map: 障碍物地图,1 表示障碍物,0 表示自由空间。start_point,end_point: 起点和终点坐标。max_speed,max_acc: 最大速度和加速度限制。dt: 时间步长。
4.3 输出结果
path: 规划的路径点集合。speed_profile: 每个路径点对应的速度。
5. 运行示例
% 示例运行
obstacle_map = [0 0 1 0 0; ...
0 0 1 0 0; ...
0 0 0 0 0; ...
0 0 1 0 0; ...
0 0 0 0 0];
start_point = [1, 1];
end_point = [5, 5];
grid_size = 1;
[path, cost_map] = dp_path_planning(obstacle_map, start_point, end_point, grid_size);
max_speed = 10; % m/s
max_acc = 2; % m/s^2
dt = 0.1; % s
[speed_profile, cost_speed] = dp_speed_planning(path, max_speed, max_acc, dt);
% 可视化
figure;
subplot(1, 2, 1);
imagesc(obstacle_map);
hold on;
plot(path(:, 2), path(:, 1), 'r', 'LineWidth', 2);
title('Path Planning');
subplot(1, 2, 2);
plot(speed_profile, 'b', 'LineWidth', 2);
title('Speed Profile');
xlabel('Path Point');
ylabel('Speed (m/s)');
以上代码和文档提供了一个完整的基于 DP 的路径和速度规划实现方案,适用于自动驾驶场景。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









