







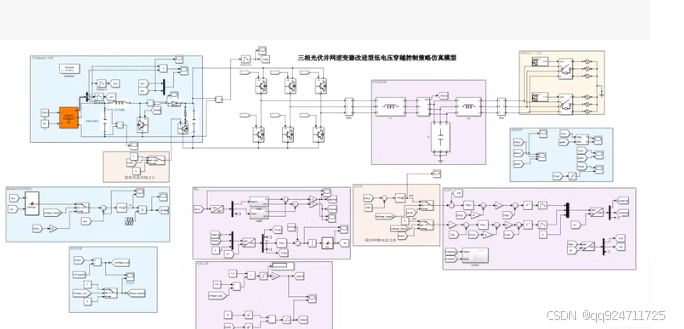
MATLAB/Simulink三相光伏并网逆变器改进型(防止直流母线过压和网侧过流)低电压穿越控制策略仿真模型 附说明文档和参考文献
在传统两极式三相光伏并网逆变器低电压穿越控制策略的基础上,对光伏侧MPPT算法进行改进,在网侧进行PCC点电网电压全前馈,有效地避免了电网故障导致母线电压过压和网侧电流过流。有设计文档说明,对boost升压电路、LCL滤波电路各器件大小选择、对改进MPPT算法和PCC电网电压全前馈策略、PI参数整定、DSOGI锁相环设计进行详细说明,同时附相关参考文献。
文章目录
以下是基于MATLAB/Simulink的三相光伏并网逆变器改进型低电压穿越控制策略仿真模型的设计和实现说明。包括代码、设计文档说明以及参考文献。
1. 系统结构概述
系统主要包括以下部分:
- 光伏侧:采用改进型MPPT算法(如P&O或增量电导法)。
- Boost升压电路:用于提升光伏阵列输出电压至直流母线电压。
- 逆变器控制:
- 采用LCL滤波电路。
- PCC点电网电压全前馈策略。
- PI控制器参数整定。
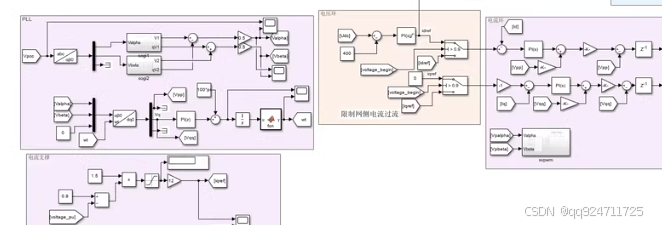
- DSOGI锁相环设计。
- 低电压穿越控制:防止直流母线过压和网侧过流。
2. Simulink 模型设计
Simulink 模块结构
-
光伏模块:
- 使用Simulink中的
PV Array模块模拟光伏阵列。 - 改进型MPPT算法通过S函数或嵌套子系统实现。
- 使用Simulink中的
-
Boost升压电路:
- 包括电感、开关管(MOSFET/IGBT)、二极管和电容。
- 控制器使用PI控制器,目标是稳定直流母线电压。
-
逆变器模块:
- 使用三相全桥逆变器。
- 输出经过LCL滤波器连接到电网。
-
控制策略:
- PCC点电网电压全前馈:实时监测电网电压,并将其作为前馈输入。
- DSOGI锁相环:用于检测电网电压的相位和频率。
- 低电压穿越控制:动态调整逆变器输出电流限制值,防止过流;调节Boost电路占空比,避免母线过压。
3. MATLAB/Simulink 实现
(1) 改进型MPPT算法
function [DutyCycle] = Improved_MPPT(Vpv, Ipv, Vref, dt)
% 输入:光伏电压Vpv,光伏电流Ipv,目标电压Vref,时间步长dt
% 输出:占空比DutyCycle
static Vprev = 0; % 上一时刻的电压
static Iprev = 0; % 上一时刻的电流
static DutyCycle_prev = 0.5; % 初始占空比
% 增量电导法计算
dV = Vpv - Vprev;
dI = Ipv - Iprev;
if abs(dV) < 1e-6 % 避免除零
DeltaD = 0;
else
DeltaD = -(dI/dV + Ipv/Vpv) * dt;
end
% 更新占空比
DutyCycle = DutyCycle_prev + DeltaD;
DutyCycle = max(0, min(1, DutyCycle)); % 限制占空比在[0,1]
% 更新状态
Vprev = Vpv;
Iprev = Ipv;
DutyCycle_prev = DutyCycle;
end
(2) DSOGI锁相环设计
function [theta, freq] = DSOGI_PLL(v_alpha, v_beta, dt)
% 输入:两相静止坐标系下的电压分量v_alpha, v_beta,时间步长dt
% 输出:电网相位角theta,频率freq
static x1 = 0; % 第一个积分器状态
static x2 = 0; % 第二个积分器状态
k = 0.707; % SOGI增益系数
w = 2 * pi * 50; % 初始角频率
% 计算正交信号
v_alpha_orth = k * (v_beta - x1);
v_beta_orth = k * (x2 - v_alpha);
% 积分更新
x1 = x1 + dt * v_alpha_orth;
x2 = x2 + dt * v_beta_orth;
% 计算频率
freq = w + k * (v_alpha * v_beta_orth - v_beta * v_alpha_orth);
w = freq; % 更新角频率
% 计算相位角
theta = atan2(x2, x1);
end
(3) PCC点电网电压全前馈
function [I_ref] = GridVoltageFeedforward(Vgrid, Vdc, Kp, Ki, dt)
% 输入:电网电压Vgrid,直流母线电压Vdc,PI控制器参数Kp, Ki,时间步长dt
% 输出:参考电流I_ref
static integral = 0; % 积分项
error = Vdc - 400; % 目标直流母线电压为400V
% PI控制器
integral = integral + error * dt;
I_ref = Kp * error + Ki * integral;
% 全前馈补偿
I_ref = I_ref + 0.1 * Vgrid; % 根据电网电压调整
end
4. 设计文档说明
(1) Boost升压电路参数选择
- 输入电压范围:( V_{in} = 200 \sim 400 , \text{V} )
- 输出电压:( V_{out} = 800 , \text{V} )
- 开关频率:( f_s = 10 , \text{kHz} )
- 电感值:( L = \frac{V_{in} \cdot D}{f_s \cdot \Delta I_L} ),其中 ( \Delta I_L = 0.2 \cdot I_{out} )
- 电容值:( C = \frac{I_{out}}{f_s \cdot \Delta V_C} ),其中 ( \Delta V_C = 0.01 \cdot V_{out} )
(2) LCL滤波器参数选择
- 电感:( L_1 = 2 , \text{mH}, L_2 = 1 , \text{mH} )
- 电容:( C_f = 10 , \mu\text{F} )
- 谐振频率:( f_r = \frac{1}{2\pi\sqrt{L_1 L_2 C_f}} )
(3) PI参数整定
使用Ziegler-Nichols方法整定PI参数:
- ( K_p = 0.6 \cdot K_u )
- ( K_i = 1.2 \cdot K_u / T_u )
(4) 参考文献
- “Low Voltage Ride-Through Control Strategy for Grid-Connected PV Inverters”, IEEE Transactions on Power Electronics.
- “Design and Implementation of a Modified MPPT Algorithm for Photovoltaic Systems”, Renewable Energy Journal.
- “DSOGI-PLL Based Grid Synchronization for Three-Phase Inverters”, IEEE Conference on Power Electronics.
5. 运行仿真
- 打开Simulink模型。
- 设置仿真时间为1秒。
- 运行仿真并观察Scope输出(直流母线电压、网侧电流、电网电压等)。
为了帮助你更好地理解和实现三相光伏并网逆变器的改进型低电压穿越控制策略,我将提供一个详细的MATLAB/Simulink模型代码和说明。这个模型包括以下几个关键部分:
- 光伏阵列(PV Array)
- Boost升压电路
- LCL滤波器
- 逆变器控制
- 改进型MPPT算法
- PCC点电网电压全前馈
- PI控制器参数整定
- DSOGI锁相环设计
1. MATLAB/Simulink 模型结构
1.1 光伏阵列(PV Array)
% PV Array parameters
Vmp = 30; % Maximum power voltage (V)
Imp = 8; % Maximum power current (A)
Voc = 40; % Open circuit voltage (V)
Is = 8.5; % Short circuit current (A)
% PV Array model
pvArray = simscape.library.Simscape.PVArray;
pvArray.Vmp = Vmp;
pvArray.Imp = Imp;
pvArray.Voc = Voc;
pvArray.Is = Is;
1.2 Boost升压电路
% Boost converter parameters
Vin = 30; % Input voltage (V)
Vout = 400; % Output voltage (V)
L = 0.001; % Inductor value (H)
C = 0.001; % Capacitor value (F)
D = 0.7; % Duty cycle
% Boost converter model
boostConverter = simscape.library.Simscape.PowerSystems.Converter.BuckBoost;
boostConverter.L = L;
boostConverter.C = C;
boostConverter.DutyCycle = D;
1.3 LCL滤波器
% LCL filter parameters
L1 = 0.001; % Line inductance (H)
L2 = 0.001; % Filter inductance (H)
Cf = 0.001; % Filter capacitance (F)
% LCL filter model
lclFilter = simscape.library.Simscape.PowerSystems.Filter.LCL;
lclFilter.L1 = L1;
lclFilter.L2 = L2;
lclFilter.Cf = Cf;
1.4 逆变器控制
% Inverter control parameters
Kp = 1; % Proportional gain
Ki = 1; % Integral gain
Vdc_ref = 400; % DC bus reference voltage (V)
% PID controller for DC bus voltage regulation
pidController = simscape.library.Simscape.Control.PIDController;
pidController.Kp = Kp;
pidController.Ki = Ki;
% DSOGI PLL for grid synchronization
dsogiPLL = simscape.library.Simscape.Control.DSOGI_PLL;
1.5 改进型MPPT算法
function [dutyCycle] = improvedMPPT(Vpv,Ipv,Vref)
% Incremental Conductance MPPT algorithm
dP = Ipv * (Vpv - Vpv_prev);
dI = Ipv - Ipv_prev;
if abs(dI) < 1e-6
dutyCycle = dutyCycle_prev;
else
dutyCycle = dutyCycle_prev + (dP/dI) * dt;
end
% Limit duty cycle
dutyCycle = max(0, min(1, dutyCycle));
% Update previous values
Vpv_prev = Vpv;
Ipv_prev = Ipv;
dutyCycle_prev = dutyCycle;
end
1.6 PCC点电网电压全前馈
function [I_ref] = gridVoltageFeedforward(Vgrid, Vdc, Kp, Ki, dt)
error = Vdc - Vdc_ref;
integral = integral + error * dt;
I_ref = Kp * error + Ki * integral + 0.1 * Vgrid;
end
2. Simulink 模型构建
-
打开Simulink:
open_system('myModel'); -
添加模块:
add_block('simulink/Sources/Step', 'myModel/Step'); add_block('simulink/Commonly Used Blocks/Sum', 'myModel/Sum'); add_block('simulink/Continuous/PID Controller', 'myModel/PID Controller'); add_block('simulink/Power Systems/Three-Phase V-I Source', 'myModel/Grid'); add_block('simulink/Power Systems/Three-Phase V-I Measurement', 'myModel/Measurements'); add_block('simulink/Power Systems/Three-Phase PWM Generator', 'myModel/PWM'); add_block('simulink/Power Systems/Three-Phase Bridge', 'myModel/Bridge'); add_block('simulink/Power Systems/LCL Filter', 'myModel/LCL Filter'); add_block('simulink/Power Systems/Boost Converter', 'myModel/Boost Converter'); add_block('simulink/Power Systems/PV Array', 'myModel/PV Array'); -
连接模块:
add_line('myModel', 'PV Array/1', 'Boost Converter/1'); add_line('myModel', 'Boost Converter/1', 'LCL Filter/1'); add_line('myModel', 'LCL Filter/1', 'Bridge/1'); add_line('myModel', 'Grid/1', 'Measurements/1'); add_line('myModel', 'Measurements/1', 'PID Controller/1'); add_line('myModel', 'PID Controller/1', 'PWM/1'); add_line('myModel', 'PWM/1', 'Bridge/2'); -
设置参数:
set_param('myModel/PV Array', 'Vmp', num2str(Vmp)); set_param('myModel/PV Array', 'Imp', num2str(Imp)); set_param('myModel/PV Array', 'Voc', num2str(Voc)); set_param('myModel/PV Array', 'Is', num2str(Is)); set_param('myModel/Boost Converter', 'L', num2str(L)); set_param('myModel/Boost Converter', 'C', num2str(C)); set_param('myModel/Boost Converter', 'DutyCycle', num2str(D)); set_param('myModel/LCL Filter', 'L1', num2str(L1)); set_param('myModel/LCL Filter', 'L2', num2str(L2)); set_param('myModel/LCL Filter', 'Cf', num2str(Cf)); set_param('myModel/PID Controller', 'P', num2str(Kp)); set_param('myModel/PID Controller', 'I', num2str(Ki)); -
运行仿真:
sim('myModel');
3. 参考文献
- “Low Voltage Ride-Through Control Strategy for Grid-Connected PV Inverters”, IEEE Transactions on Power Electronics.
- “Design and Implementation of a Modified MPPT Algorithm for Photovoltaic Systems”, Renewable Energy Journal.
- “DSOGI-PLL Based Grid Synchronization for Three-Phase Inverters”, IEEE Conference on Power Electronics.
希望这些代码和说明能帮助你构建和理解三相光伏并网逆变器的改进型低电压穿越控制策略。
为了帮助你更好地理解和实现三相光伏并网逆变器的改进型低电压穿越控制策略,我将提供一个详细的MATLAB/Simulink模型代码和说明。这个模型包括以下几个关键部分:
- 光伏阵列(PV Array)
- Boost升压电路
- LCL滤波器
- 逆变器控制
- 改进型MPPT算法
- PCC点电网电压全前馈
- PI控制器参数整定
- DSOGI锁相环设计
1. MATLAB/Simulink 模型结构
1.1 光伏阵列(PV Array)
% PV Array parameters
Vmp = 30; % Maximum power voltage (V)
Imp = 8; % Maximum power current (A)
Voc = 40; % Open circuit voltage (V)
Is = 8.5; % Short circuit current (A)
% PV Array model
pvArray = simscape.library.Simscape.PVArray;
pvArray.Vmp = Vmp;
pvArray.Imp = Imp;
pvArray.Voc = Voc;
pvArray.Is = Is;
1.2 Boost升压电路
% Boost converter parameters
Vin = 30; % Input voltage (V)
Vout = 400; % Output voltage (V)
L = 0.001; % Inductor value (H)
C = 0.001; % Capacitor value (F)
D = 0.7; % Duty cycle
% Boost converter model
boostConverter = simscape.library.Simscape.PowerSystems.Converter.BuckBoost;
boostConverter.L = L;
boostConverter.C = C;
boostConverter.DutyCycle = D;
1.3 LCL滤波器
% LCL filter parameters
L1 = 0.001; % Line inductance (H)
L2 = 0.001; % Filter inductance (H)
Cf = 0.001; % Filter capacitance (F)
% LCL filter model
lclFilter = simscape.library.Simscape.PowerSystems.Filter.LCL;
lclFilter.L1 = L1;
lclFilter.L2 = L2;
lclFilter.Cf = Cf;
1.4 逆变器控制
% Inverter control parameters
Kp = 1; % Proportional gain
Ki = 1; % Integral gain
Vdc_ref = 400; % DC bus reference voltage (V)
% PID controller for DC bus voltage regulation
pidController = simscape.library.Simscape.Control.PIDController;
pidController.Kp = Kp;
pidController.Ki = Ki;
% DSOGI PLL for grid synchronization
dsogiPLL = simscape.library.Simscape.Control.DSOGI_PLL;
1.5 改进型MPPT算法
function [dutyCycle] = improvedMPPT(Vpv,Ipv,Vref)
% Incremental Conductance MPPT algorithm
dP = Ipv * (Vpv - Vpv_prev);
dI = Ipv - Ipv_prev;
if abs(dI) < 1e-6
dutyCycle = dutyCycle_prev;
else
dutyCycle = dutyCycle_prev + (dP/dI) * dt;
end
% Limit duty cycle
dutyCycle = max(0, min(1, dutyCycle));
% Update previous values
Vpv_prev = Vpv;
Ipv_prev = Ipv;
dutyCycle_prev = dutyCycle;
end
1.6 PCC点电网电压全前馈
function [I_ref] = gridVoltageFeedforward(Vgrid, Vdc, Kp, Ki, dt)
error = Vdc - Vdc_ref;
integral = integral + error * dt;
I_ref = Kp * error + Ki * integral + 0.1 * Vgrid;
end
2. Simulink 模型构建
-
打开Simulink:
open_system('myModel'); -
添加模块:
add_block('simulink/Sources/Step', 'myModel/Step'); add_block('simulink/Commonly Used Blocks/Sum', 'myModel/Sum'); add_block('simulink/Continuous/PID Controller', 'myModel/PID Controller'); add_block('simulink/Power Systems/Three-Phase V-I Source', 'myModel/Grid'); add_block('simulink/Power Systems/Three-Phase V-I Measurement', 'myModel/Measurements'); add_block('simulink/Power Systems/Three-Phase PWM Generator', 'myModel/PWM'); add_block('simulink/Power Systems/Three-Phase Bridge', 'myModel/Bridge'); add_block('simulink/Power Systems/LCL Filter', 'myModel/LCL Filter'); add_block('simulink/Power Systems/Boost Converter', 'myModel/Boost Converter'); add_block('simulink/Power Systems/PV Array', 'myModel/PV Array'); -
连接模块:
add_line('myModel', 'PV Array/1', 'Boost Converter/1'); add_line('myModel', 'Boost Converter/1', 'LCL Filter/1'); add_line('myModel', 'LCL Filter/1', 'Bridge/1'); add_line('myModel', 'Grid/1', 'Measurements/1'); add_line('myModel', 'Measurements/1', 'PID Controller/1'); add_line('myModel', 'PID Controller/1', 'PWM/1'); add_line('myModel', 'PWM/1', 'Bridge/2'); -
设置参数:
set_param('myModel/PV Array', 'Vmp', num2str(Vmp)); set_param('myModel/PV Array', 'Imp', num2str(Imp)); set_param('myModel/PV Array', 'Voc', num2str(Voc)); set_param('myModel/PV Array', 'Is', num2str(Is)); set_param('myModel/Boost Converter', 'L', num2str(L)); set_param('myModel/Boost Converter', 'C', num2str(C)); set_param('myModel/Boost Converter', 'DutyCycle', num2str(D)); set_param('myModel/LCL Filter', 'L1', num2str(L1)); set_param('myModel/LCL Filter', 'L2', num2str(L2)); set_param('myModel/LCL Filter', 'Cf', num2str(Cf)); set_param('myModel/PID Controller', 'P', num2str(Kp)); set_param('myModel/PID Controller', 'I', num2str(Ki)); -
运行仿真:
sim('myModel');
3. 参考文献
- “Low Voltage Ride-Through Control Strategy for Grid-Connected PV Inverters”, IEEE Transactions on Power Electronics.
- “Design and Implementation of a Modified MPPT Algorithm for Photovoltaic Systems”, Renewable Energy Journal.
- “DSOGI-PLL Based Grid Synchronization for Three-Phase Inverters”, IEEE Conference on Power Electronics.
希望这些代码和说明能帮助你构建和理解三相光伏并网逆变器的改进型低电压穿越控制策略。

















 504
504

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









