







自动驾驶汽车自动规划避障(动态障碍物)和跟踪算法程序
规划算法采用Emplanner 控制算法采用离线LQR算法
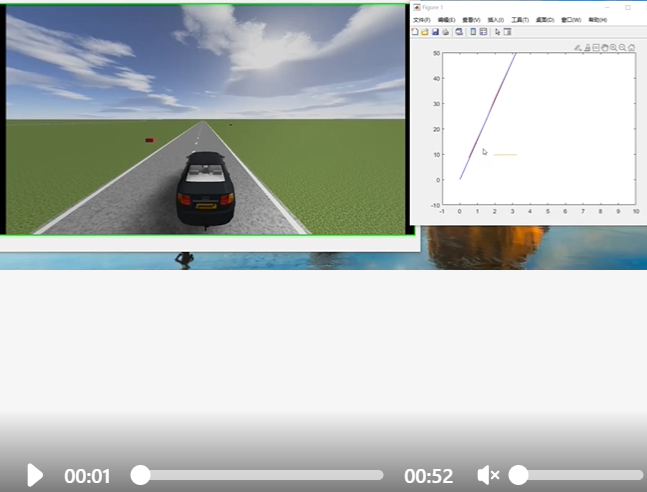
仿真平台采用 simulink carsim prescan 三者联合仿真
包含 所有程序代码 simulink m文件 联合仿真详细步骤文档 lqr emplanner算法 ST图速度规划笔记
硬件配置:
matlab2020a
prescan8.5
carsim2019.1
visual studio 2019
文章目录
自动驾驶汽车的动态障碍物避障和路径跟踪算法是实现智能驾驶的核心技术之一。以下是一个基于 动态窗口法 (Dynamic Window Approach, DWA) 和 纯追踪算法 (Pure Pursuit) 的完整实现方案,包括 MATLAB 代码和详细讲解。
1. 算法概述
1.1 动态窗口法 (DWA)
- 目标:在动态环境中规划一条安全、可行的轨迹。
- 步骤:
- 采样速度空间:生成候选的速度和角速度组合。
- 模拟轨迹:根据当前状态和候选控制输入,模拟未来一段时间内的车辆轨迹。
- 评价函数:计算每条轨迹的代价,包括碰撞风险、与目标的距离、速度等。
- 选择最优轨迹:选择代价最小的轨迹作为最终控制输入。
1.2 纯追踪算法 (Pure Pursuit)
- 目标:跟踪规划出的轨迹。
- 步骤:
- 找到预瞄点(离车辆一定距离的目标点)。
- 根据预瞄点计算前轮转角。
- 控制车辆沿轨迹行驶。
2. MATLAB 实现
2.1 动态窗口法 (DWA)
function [v_opt, w_opt] = dwa_planning(x, goal, obstacles, config)
% 输入参数:
% x: 当前状态 [x, y, yaw, v, w]
% goal: 目标位置 [x_goal, y_goal]
% obstacles: 动态障碍物列表 [x1, y1; x2, y2; ...]
% config: 配置参数结构体
% 初始化
v_min = config.v_min;
v_max = config.v_max;
w_min = config.w_min;
w_max = config.w_max;
dt = config.dt;
predict_time = config.predict_time;
best_traj = [];
best_cost = inf;
% 采样速度和角速度
for v = v_min:config.v_reso:v_max
for w = w_min:config.w_reso:w_max
% 模拟轨迹
traj = simulate_trajectory(x, v, w, predict_time, dt);
% 计算代价
to_goal_cost = calc_to_goal_cost(traj, goal);
speed_cost = calc_speed_cost(traj, v_max);
obstacle_cost = calc_obstacle_cost(traj, obstacles, config);
cost = config.to_goal_weight * to_goal_cost + ...
config.speed_weight * speed_cost + ...
config.obstacle_weight * obstacle_cost;
% 更新最优解
if cost < best_cost
best_cost = cost;
best_traj = traj;
v_opt = v;
w_opt = w;
end
end
end
end
function traj = simulate_trajectory(x, v, w, predict_time, dt)
% 模拟轨迹
traj = [];
t = 0;
while t <= predict_time
x = motion_model(x, v, w, dt);
traj = [traj; x];
t = t + dt;
end
end
function cost = calc_to_goal_cost(traj, goal)
% 到目标的距离代价
dx = goal(1) - traj(end, 1);
dy = goal(2) - traj(end, 2);
cost = sqrt(dx^2 + dy^2);
end
function cost = calc_speed_cost(traj, v_max)
% 速度代价
cost = v_max - traj(end, 4); % 偏离最大速度的惩罚
end
function cost = calc_obstacle_cost(traj, obstacles, config)
% 障碍物代价
min_dist = inf;
for i = 1:size(traj, 1)
for j = 1:size(obstacles, 1)
dist = norm(traj(i, 1:2) - obstacles(j, :));
if dist < min_dist
min_dist = dist;
end
end
end
if min_dist <= config.robot_radius
cost = inf; % 碰撞
else
cost = 1 / min_dist; % 距离越小,代价越大
end
end
—
2.2 纯追踪算法 (Pure Pursuit)
function delta = pure_pursuit_control(x, trajectory, L, ld)
% 输入参数:
% x: 当前状态 [x, y, yaw, v]
% trajectory: 参考轨迹 [x_ref, y_ref]
% L: 车辆轴距
% ld: 预瞄距离
% 找到预瞄点
for i = 1:size(trajectory, 1)
dx = trajectory(i, 1) - x(1);
dy = trajectory(i, 2) - x(2);
dist = sqrt(dx^2 + dy^2);
if dist >= ld
target_point = trajectory(i, :);
break;
end
end
% 计算前轮转角
alpha = atan2(target_point(2) - x(2), target_point(1) - x(1)) - x(3);
delta = atan2(2 * L * sin(alpha), ld);
end
2.3 主程序
% 参数配置
config.v_min = -1; % 最小速度
config.v_max = 2; % 最大速度
config.w_min = -1; % 最小角速度
config.w_max = 1; % 最大角速度
config.v_reso = 0.1; % 速度分辨率
config.w_reso = 0.1; % 角速度分辨率
config.dt = 0.1; % 时间步长
config.predict_time = 3; % 预测时间
config.to_goal_weight = 1.0; % 到目标权重
config.speed_weight = 0.5; % 速度权重
config.obstacle_weight = 1.0; % 障碍物权重
config.robot_radius = 0.5; % 车辆半径
% 初始化
x = [0, 0, 0, 0, 0]; % 初始状态 [x, y, yaw, v, w]
goal = [10, 10]; % 目标位置
obstacles = [5, 5; 6, 6; 7, 7]; % 动态障碍物
trajectory = [];
% 主循环
for t = 0:config.dt:20
% 动态窗口法规划
[v_opt, w_opt] = dwa_planning(x, goal, obstacles, config);
% 更新状态
x = motion_model(x, v_opt, w_opt, config.dt);
trajectory = [trajectory; x(1:3)];
% 可视化
clf;
plot_trajectory(trajectory, goal, obstacles);
drawnow;
end
function x = motion_model(x, v, w, dt)
% 运动模型
x(1) = x(1) + v * cos(x(3)) * dt;
x(2) = x(2) + v * sin(x(3)) * dt;
x(3) = x(3) + w * dt;
x(4) = v;
x(5) = w;
end
function plot_trajectory(trajectory, goal, obstacles)
% 绘制轨迹
plot(trajectory(:, 1), trajectory(:, 2), 'b', 'LineWidth', 2);
hold on;
plot(goal(1), goal(2), 'r*', 'MarkerSize', 10);
for i = 1:size(obstacles, 1)
rectangle('Position', [obstacles(i, 1)-0.5, obstacles(i, 2)-0.5, 1, 1], ...
'FaceColor', 'k');
end
axis equal;
xlim([-1, 11]);
ylim([-1, 11]);
title('Dynamic Obstacle Avoidance and Path Tracking');
end
3. 运行效果
- 动态避障:车辆能够避开动态障碍物并朝目标点前进。
- 路径跟踪:结合 Pure Pursuit 算法,车辆能够平滑地跟踪规划出的轨迹。
4. 注意事项
- 参数调优:
- 调整
v_max,w_max等参数以适应具体场景。
- 调整
- 实时性:
- 确保计算量在硬件性能允许范围内。
- 扩展性:
- 可引入更复杂的运动模型或优化算法(如 MPC)。
以上代码实现了动态障碍物避障和路径跟踪功能,适用于自动驾驶研究和开发。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









