







在数字图像处理中,图像平滑(Image Smoothing)是去除噪声、改善图像质量的关键技术之一。通过滤波算法,可以有效地抑制高频噪声,但同时可能牺牲部分图像细节。本文将以均值滤波、高斯滤波和中值滤波为核心,结合OpenCV代码实践,详细解析其原理、实现方法及适用场景。
一、图像噪声与滤波基础
1.1 图像噪声的类型
-
高斯噪声:服从正态分布的随机噪声
-
椒盐噪声:随机出现的黑白像素点
-
泊松噪声:由光子计数引起的噪声
1.2 滤波的核心思想
通过邻域像素的加权或统计运算,消除孤立的噪声点。滤波核(Kernel)的尺寸和权重分布直接影响处理效果。
二、均值滤波(Average Filter)
2.1 数学原理
均值滤波是最简单的线性滤波方法,用邻域像素的平均值替代中心像素值。
核函数公式:
2.2 OpenCV实现
import cv2
import numpy as np
# 读取含噪声图像
img = cv2.imread('noisy_image.jpg')
# 均值滤波
kernel_size = (5, 5) # 核尺寸
blur = cv2.blur(img, kernel_size)
# 显示结果
cv2.imshow('Original', img)
cv2.imshow('Average Blur', blur)
cv2.waitKey(0)2.3 效果分析
| 优点 | 缺点 |
|---|---|
| 算法简单,计算速度快 | 导致图像模糊 |
| 有效抑制高斯噪声 | 边缘信息丢失明显 |
三、高斯滤波(Gaussian Filter)
3.1 数学原理
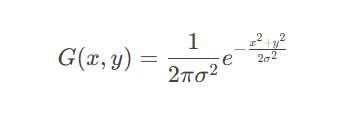
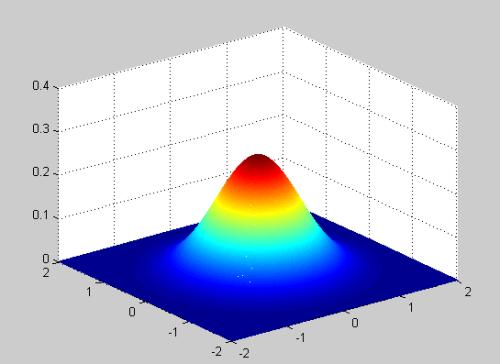
基于高斯函数的权重分配,距离中心越近的像素权重越高。
二维高斯函数:
3.2 OpenCV实现
# 高斯滤波
sigma = 1.5 # 标准差
gaussian_blur = cv2.GaussianBlur(img,
(5,5), # 核尺寸
sigma)
# 不同sigma值对比实验
sigma_1 = cv2.GaussianBlur(img, (5,5), 0.5)
sigma_3 = cv2.GaussianBlur(img, (5,5), 3.0)3.3 参数影响
-
核尺寸:必须为奇数,如(3,3), (5,5)
-
标准差σ:值越大,平滑效果越显著
3.4 应用场景
-
摄像机实时降噪
-
图像预处理(如边缘检测前)
四、中值滤波(Median Filter)
4.1 数学原理
非线性滤波方法,取邻域像素的中值作为输出:

4.2 OpenCV实现
# 中值滤波
median_blur = cv2.medianBlur(img, 5) # 核尺寸需为奇数
# 椒盐噪声处理对比
salt_pepper_img = add_salt_pepper(img, 0.1) # 添加10%椒盐噪声
restored = cv2.medianBlur(salt_pepper_img, 3)4.3 特性分析
-
优势:对椒盐噪声消除效果显著,保留边缘锐利
-
局限:大尺寸核会显著增加计算量
五、综合对比与选择策略
5.1 性能对比表
| 指标 | 均值滤波 | 高斯滤波 | 中值滤波 |
|---|---|---|---|
| 计算复杂度 | 低 | 中 | 高 |
| 边缘保留 | 差 | 中 | 好 |
| 适用噪声类型 | 高斯 | 高斯 | 椒盐 |
| 实时性 | 优 | 良 | 差 |
5.2 选择建议
-
高斯噪声优先选择高斯滤波
-
椒盐噪声必须使用中值滤波
-
实时系统可考虑均值滤波
-
边缘敏感场景推荐非线性的中值滤波
5.3 混合使用案例
# 先中值滤波去除椒盐噪声,再用高斯滤波平滑
combined = cv2.GaussianBlur(
cv2.medianBlur(img, 3),
(5,5), 0
)六、进阶技巧与注意事项
6.1 核尺寸选择原则
-
从3×3开始逐步增加
-
超过11×11需谨慎考虑性能
6.2 边界处理策略
OpenCV默认使用BORDER_REFLECT_101,可通过borderType参数修改:
cv2.GaussianBlur(img, (5,5), 0,
borderType=cv2.BORDER_CONSTANT)6.3 并行化加速
对于4K等高分辨率图像:
# 使用OpenCL加速(需硬件支持)
cv2.UMat(img)
cv2.medianBlur(..., cv2.CV_OCL_INPUT)七、总结与展望
本文介绍的三种经典滤波方法构成了图像预处理的基础。实际应用中常需要组合使用多种滤波方式,例如:
-
医疗影像:中值滤波+各向异性扩散
-
自动驾驶:高斯滤波+双边滤波
-
工业检测:自适应中值滤波
未来发展方向包括基于深度学习的智能降噪算法(如DnCNN),但传统滤波方法因其高效可靠,仍将在实时系统中长期占据重要地位。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









