









结果展示

在Pothole Detection数据集上对YOLOv7进行微调的步骤如下:
0 环境配置
if` `not` `os.path.exists(``'yolov7'``):`` ``!git clone https:``/``/``github.com``/``WongKinYiu``/``yolov7.git` `%``cd yolov7` `!pip install ``-``r requirements.txt
-
数据集准备:
- 收集一个专门用于pothole(坑洼)检测的数据集,包括图像和相应的注释文件。注释可以使用Pascal VOC或YOLO格式。
- 将数据集分割为训练集和验证集。
- 图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传](https://img-
- 数据下载链接:

!wget https://learnopencv.s3.us-west-2.amazonaws.com/pothole_dataset.zip
# Extract the dataset.
!unzip -q pothole_dataset.zip
数据排列:
pothole_dataset/
├── images
│ ├── test [118 entries exceeds filelimit, not opening dir]
│ ├── train [1265 entries exceeds filelimit, not opening dir]
│ └── valid [
-
下载预训练权重:
-
从官方仓库或Darknet网站等来源获取YOLOv7的预训练权重。
!wget https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-tiny.pt
-
-
配置文件:
- 创建或修改所需的训练配置文件。
- 调整类别数量以匹配pothole检测数据集中的类别数。
- 更新训练、验证和测试数据集的路径。
- 根据需要自定义其他超参数。
更改配置文件
%%writefile data/pothole.yaml train: ../pothole_dataset/images/train val: ../pothole_dataset/images/valid test: ../pothole_dataset/images/test # Classes nc: 1 # number of classes names: ['pothole'] # class names -
训练:
-
使用下载的预训练权重初始化YOLOv7模型。
-
加载训练数据集,并通过迁移学习等技术开始微调模型。
-
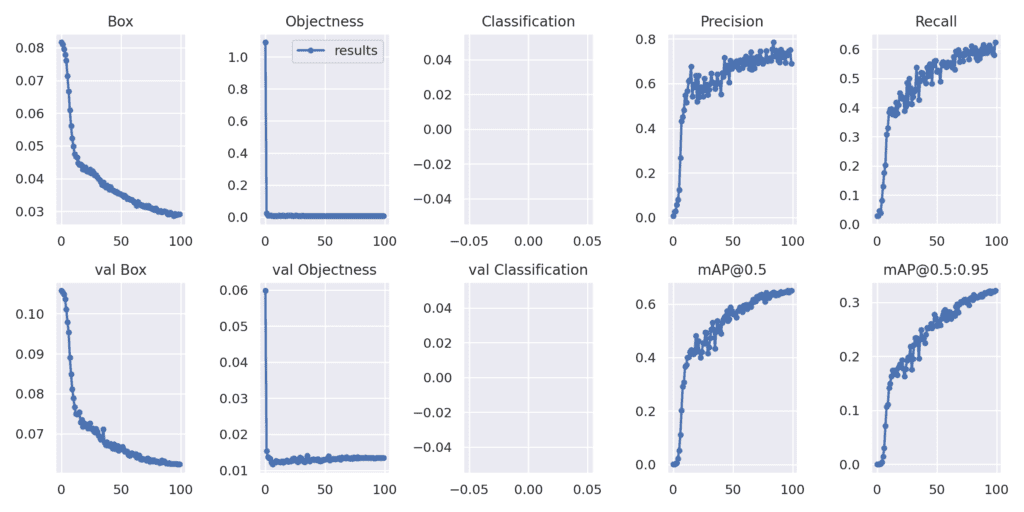
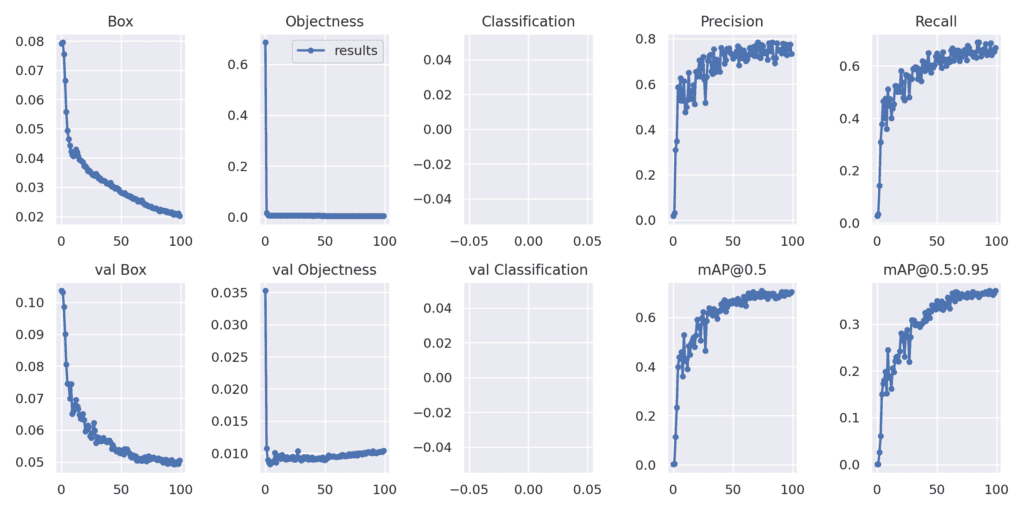
在多个epochs上训练模型,同时监控损失和mAP(mean Average Precision)指标。
-
使用数据增强技术(如随机裁剪、翻转、旋转等)来提高模型的泛化能力。
-
–device:GPU设备编号(ID),用于进行训练。由于只有一个GPU,所以设为0。
–data:接受数据集的YAML文件路径。
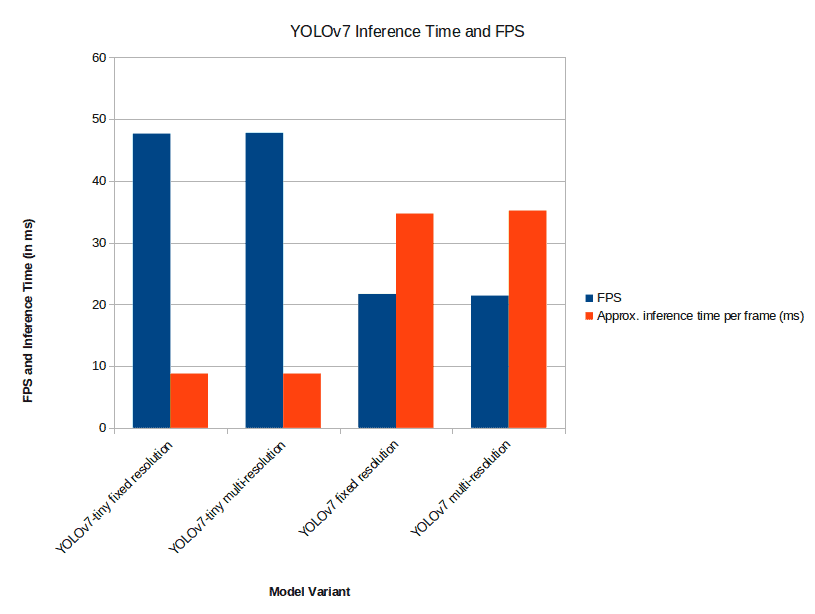
–img:默认情况下,图像会在输入网络之前被调整为640×640的分辨率。您可以在此处指定图像大小。
–cfg:模型配置文件的路径,用于加载我们之前创建的模型架构。
–weights:预训练模型的路径。
–name:默认情况下,所有训练、验证和测试结果都会保存在runs目录的子目录中。您可以通过此参数指定这些子目录的名称。
–hyp:YOLOv7系列中的所有模型都具有不同的参数和超参数。这些包括学习率、数据增强技术以及增强的强度等多个超参数。所有这些超参数都在yolov7/data目录中的超参数文件(YAML文件)中定义。在此参数中,您需要指定合适的YOLOv7-tiny模型超参数文件的路径
!python train.py --epochs 100 --workers 4 --device 0 --batch-size 32 \ --data data/pothole.yaml --img 640 640 --cfg cfg/training/yolov7_pothole-tiny.yaml \ --weights 'yolov7-tiny.pt' --name yolov7_tiny_pothole_fixed_res --hyp data/hyp.scratch.tiny.yaml Let’s go overr-images%5Cimage-20231012205821363.png&pos_id=img-MOmMEWe5-1697116793583)
-
-
评估:
-

python detect.py --source ../../inference_data/video.mp4 --weights runs/train/yolov7_pothole_multi_res/weights/best.pt --view-img评估脚本:
!python test.py --weights runs/train/yolov7_tiny_pothole_fixed_res/weights/best.pt --task test --data data/pothole.yaml 1 2 Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 4/4 [00:04<00:00, 1.09s/it] all 118 304 0.82 0.556 0.64 0.348- 在验证数据集上评估训练好的模型,以评估其性能。
- 计算精确度、召回率和F1分数等指标来衡量模型的准确性。
- 根据评估结果调整模型或超参数。
改进:
%%writefile cfg/training/yolov7_pothole.yaml
# parameters
nc: 1 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 1, Conv, [64, 1, 1]],
[-2, 1, Conv, [64, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 11
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 16-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 24
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 29-P4/16
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 37
[-1, 1, MP, []],
[-1, 1, Conv, [512, 1, 1]],
[-3, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 42-P5/32
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 50
]
# yolov7 head
head:
[[-1, 1, SPPCSPC, [512]], # 51
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[37, 1, Conv, [256, 1, 1]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 63
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[24, 1, Conv, [128, 1, 1]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]], # 75
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3, 63], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 88
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3, 51], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-2, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 101
[75, 1, RepConv, [256, 3, 1]],
[88, 1, RepConv, [512, 3, 1]],
[101, 1, RepConv, [1024, 3, 1]],
[[102,103,104], 1, IDetect, [nc, anchors]
请记住,根据数据集的规模、质量和特定要求对YOLOv7模型进行微调。此外,确保拥有足够的数据量,以避免过拟合并获得良好的泛化能力。

















 1203
1203











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











