




电机类型
无刷直流电机(BLDC:Brushless Direct Current Motor)也被称为电子换相电机(ECM或EC电机)或同步直流电机,是一种使用直流电(DC)电源的同步电机,无刷直流电机实质上为采用直流电源输入,并用逆变器变为三相交流电源,带位置反馈的永磁同步电机。
无刷直流电机具有可靠性高、无换相火花、机械噪声低等优点,广泛应用于汽车、家电、高档录音、录像机、电子仪器及自动化办公设备中。它集直流电机与交流电机的优点于一身,既有直流电机良好的调整性能,又有交流电机结构简单、无换相火花、运行可靠和易于维护等优点。
机械臂一般采用的电机有步进电机、伺服电机、直流电机和无刷电机等。
1、步进电机
步进电机常用于控制机械臂的旋转方向和角度,具有定位精度高、控制简单等优点,适于小功率、低速的运动控制。步进电机由于没有实际的传感器反馈,因此在高负载、高速度下容易丢步,误差增大。因此,步进电机主要适用于低速、低精度要求的应用环境。
2、伺服电机
伺服电机是机械臂中常用的一种电机类型,其具有高速、高精度和低噪音等优点。伺服电机需要配合专用的伺服控制器进行控制,能够实现闭环控制,可实时反馈电机的位置、速度和方向等信息,提高了运动控制的精度和稳定性。伺服电机广泛应用于需要高速、高精度的运动控制场合,如物流搬运、组装、焊接等。
3、直流电机
直流电机具有结构简单、启动转矩大、转速可控等特点,非常适合低速大扭矩的运动控制场合。直流电机还具有应变能力强、维修方便等优点。机械臂中使用的直流电机数量较多,一般用于机械臂的驱动控制和部分关键传动机构。
4、无刷电机
无刷电机是一种相对于有刷电机而言简单可靠的电机,广泛应用于机械臂中。无刷电机具有高效率、高控制精度、噪音低等优点,是目前发展趋势。无刷电机结构简单,没有电刷和电梯,在高速运动时几乎没有摩擦和噪音。机械臂中使用的无刷电机一般适用于高速、高效率、高精度的运动控制。
总之,机械臂的电机选择需要考虑机械臂的运动控制要求、承载条件、工作环境等因素。不同的电机类型有各自的特点,选择合适的电机类型和控制方案,可以有效提高机械臂的运动控制精度和稳定性。
新能源汽车电机主要有以下几种类型:
1、直流电动机:在电动汽车发展的早期,很多电动汽车都是采用直流电动机方案。但由于直流电动机本身的短板非常突出,制约了它的瞬时过载能力和电机转速的进一步提高,而且在长时间工作的情况下,电机的机械结构会产生损耗,提高了维护成本,已逐渐被新能源汽车行业所淘汰。
2、交流异步电动机:是目前工业中应用十分广泛的一类电机,可在高速运转时保持较高的效率,且价格相对较低,因此适用于需要高性能和高效率的电动汽车。特斯拉等高性能电动车就采用了这种电机。
3、永磁同步电动机:利用永磁体作为转子,具有高功率密度和高效率的牵引特性,可以让电机获得更高的额定功率。但由于使用了稀土材料,电机价格较高。这种电机在国产电动汽车品牌中得到了广泛应用。
4、开关磁阻电动机:作为一种新型电机,相比其他类型的驱动电机而言,开关磁阻电机的结构最为简单,定、转子均为普通硅钢片叠压而成的双凸极结构,具有结构简单坚固、可靠性高、质量轻、成本低、效率高、温升低、易于维修等诸多优点。适用于恶劣环境,非常适合作为电动汽车的驱动电机使用。
电机算法
常用的电机中,无刷直流电机具有非常显著的优点。首先,无刷直流电机没有电刷和换向器,质量较轻,噪音较低,运行更平滑,寿命长,机械效率更高;其次,无刷直流电机更为节能可靠,响应速度快,能够保持长时间、高精度的运转;最后,无刷直流电机的应用范围更宽,从航空航天到精密仪器等领域都有无刷直流电机的身影。
目前针对无刷直流电机的控制方法主要有二种,一是基于传感器的有感控制算法,另一种是无传感器的无感控制算法。
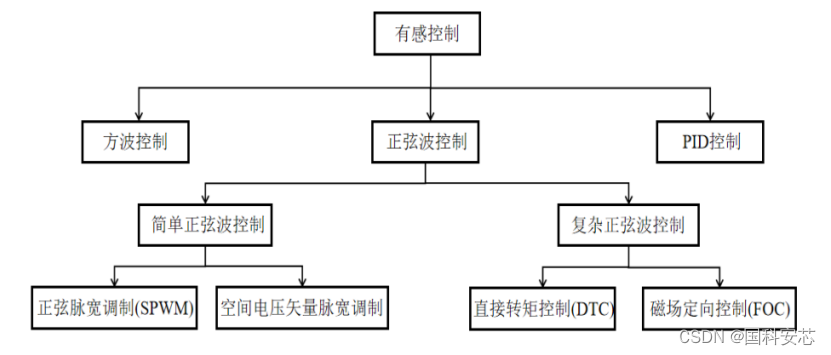
1 有感控制算法
有感控制算法通过位置传感器直接对转子位置信息检测,而编码器则是一种可以将位置和速度信息转换为数字信号的位置传感器,常见的编码器主要有光电编码器、旋转变压器、磁编码器。虽然随着科技水平的提高,编码器的检测精度在不断的提高,基于编码器的有位置传感器的控制算法对转子位置信息有较高的检测精度。但是由于位置检测的传感器成本高,且易受温度、湿度、粉尘、机械振动、机械安装等外界因素和自身的一系列因素的影响,并且对于一些估计精度要求不是很高、低成本,并且可以在任何环境下都能正常工作的应用领域,无感驱动算法是最佳选择,所以对无感控制算法的研究是目前的主流趋势。
2 无感控制算法
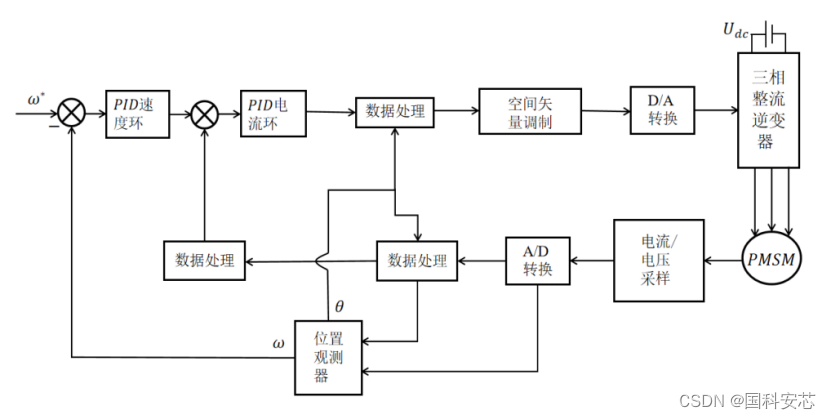
无感驱动算法则用于代替位置传感器对转子位置信息进行估计。无感驱动算法有很多,常见的一些基本算法有反电动势法、定子磁链法、电感法等,这些算法多根据电机自身的一些基本的电气特性估计转子的位置,进行简单的控制;还有目前比较热门的研究算法,直接转矩控制(DTC)算法和无感磁场矢量控制(FOC)算法。其中,直接转矩控制算法主要是根据 PMSM电机的采样电压和三相采样电流,电机的磁通和转矩因此也得到了估计,通过对转矩的控制,实现对电机的驱动;而无感FOC算法则是多采用一些位置观测器和反正切或PLL 计算的组合,构成可以对转子位置信息进行估计的位置观测算法。无感 FOC算法是通过数学方法对励磁和力矩试下解耦控制,对电机的控制电流进行矢量分解,其中位置观测器起到了有感控制中位置传感器的功能,其区别主要在于无感FOC算法需要先对PMSM进行电流和电压采样,然后通过坐标变换进行数据处理,将处理后的数据作为位置观测器的输入,通过位置观测器内部作用,获得扩展反电动势,并将扩展反电动势作为反正切或者PLL的输入,从而估计出转子转速和转子位置信息。估计得到的转子转速和位置信息还作为反馈和其它模块的输入,不断的将估计值向设定值拟合。最后在通过空间电压脉宽调制算法对转子位置进行扇区确认,产生用于驱动三相逆变器的PWM调制波,从而实现对PMSM的驱动。
| 常见的无感控制算法 | 基于状态观测器的无感控制算法 |
| 反电动势法 | FAST观测器 |
| 定子磁链法 | Luenberger观测器 |
| 电感法 | 滑膜观测器 |
| 模型参考自适应法 | 自适应滑膜观测器 |
| 直接转矩法 | 同步旋转坐标系的滑膜观测器 |
| 模型参考自适应系统的位置观测器 | |
| 跟踪观测器 |
算法应用前景
电机在诸多领域均有重要而广泛的应用,具体包括但不限于:电气伺服传动领域、信息处理领域、交通运输领域、家用电器领域、消费电子领域、国防领域、医疗领域、探测领域等等。随着所涉及领域的不断深入,电机的各方面要求也会逐渐提升,应用在电机上的技术与学科,例如材料、芯片、电机架构、电磁转换等方面都在不断变革中。电机算法作为电机研究的重点之一,对电机性能、精确控制以及节约能源等方面具有极其重要的作用。
近年来针对电机控制发展出许多电机控制策略,大致分为三类:传统控制策略、现代控制策略以及智能控制策略。无论哪一种控制策略都有其各自的针对性和局限性,对于存在参数变化、负载扰动等不确定性因素的伺服系统控制来说,设计出满足系统快响应、强鲁棒和高精度的控制器需要权衡利弊,将控制器相互结合,取长补短,从而满足运动控制特别是精密伺服控制的要求。
算法研究具有可移植性,在电机控制取得突破性进展的算法,在其他领域上也有很高的参考价值,例如雷达、探测、处理器、传感器等,一套优异的算法,应用在电机上能显著提高其性能,在其他方面通常也能取得相应的进展。由于这种广泛性,算法的研究一直处于热点。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









