







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
大家好,这里是海浪学长计算机毕设专题,本次分享的课题是
🎯基于图像处理的社区垃圾识别分类系统
项目背景
随着城市化进程的加快,社区垃圾的处理与分类问题日益突出。有效的垃圾分类不仅有助于资源的回收与再利用,还能减少环境污染,提高居民的生活质量。在社区环境中,居民的垃圾分类意识和参与度直接影响分类的效果。引入智能垃圾识别系统,结合深度学习和物联网技术,可以实现对垃圾的自动识别与分类,提升垃圾分类的准确性和效率。这不仅能改善社区环境卫生,还能增强居民的环保意识,推动可持续发展。
数据集
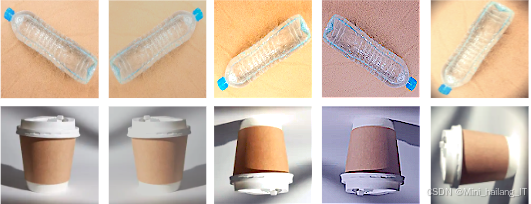
社区垃圾图像采集采用了自主拍摄与互联网收集相结合。选择了多个不同的社区环境,使用高质量相机拍摄各种类型的垃圾,包括可回收物、厨余垃圾、不可回收物等。考虑到不同光照和天气条件对图像质量的影响,尽可能在多种环境下进行拍摄。互联网收集也被用来获取一些特定场景的图像,以补充数据集的多样性和代表性。通过这种方式,我们确保了数据集中包含丰富的垃圾类型和不同的场景,为后续的标注和模型训练提供了坚实的基础。

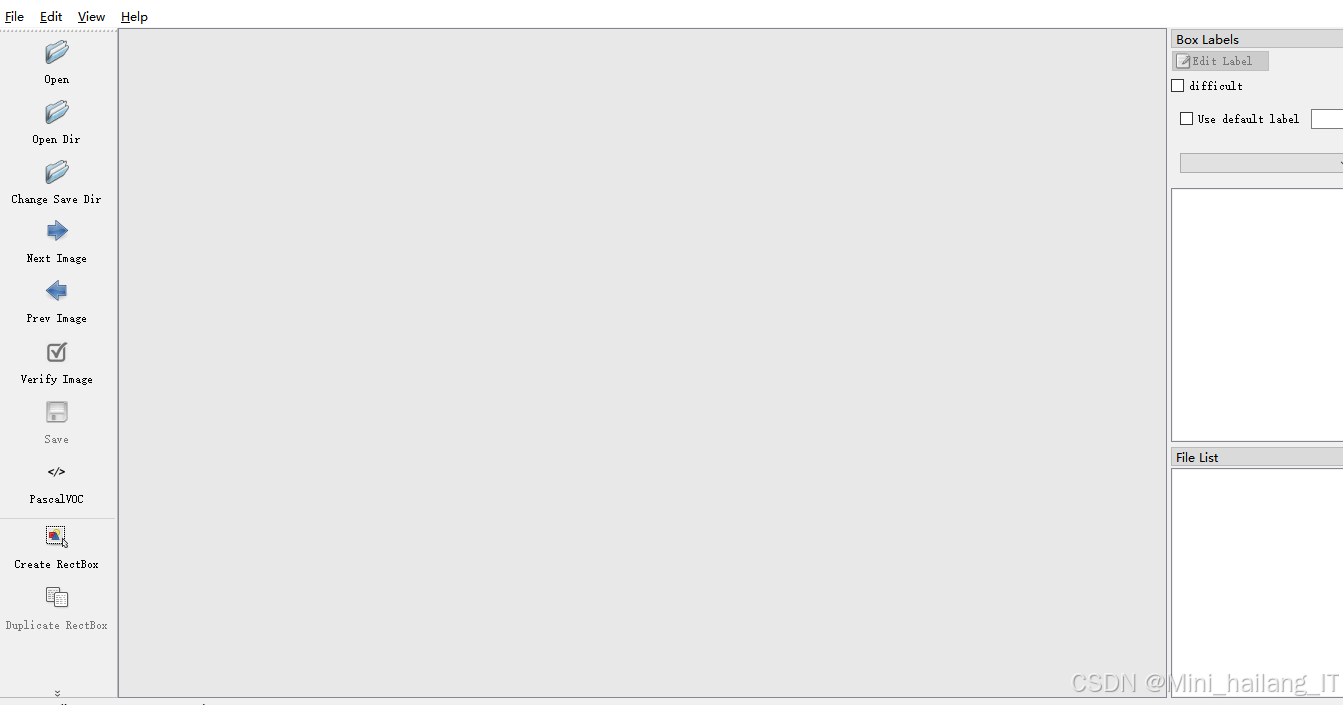
数据标注使用Labeling工具,对收集到的图像进行详细的标注,标注内容包括垃圾的种类和位置。标注人员需要对图像中的每个垃圾实例进行精确的掩膜标注,确保每个实例的边界清晰且准确。标注人员经过培训,以确保标注质量符合模型训练的要求。通过生成包含每个垃圾实例类别和掩膜信息的标注文件,为后续的模型训练提供高质量的数据支持,使模型能够有效学习和识别不同类型的垃圾。
数据集按70%用于训练、15%用于验证和15%用于测试的比例进行划分,以便于模型的训练和评估。数据增强是深度学习中常用的一种技术,通过对原始数据进行各种变换来生成新的样本,以提高模型的泛化能力和鲁棒性。在图像处理任务中,数据增强可以包括旋转、缩放、剪切、翻转、颜色调整、添加噪声等操作。这些变换不仅增加了训练集的多样性,还能有效缓解过拟合问题,使模型能够更好地适应未见过的数据。通过数据增强,模型在训练时能够接触到更为丰富的特征,从而提升其在实际应用中的表现和准确性。最终,经过划分和扩展处理后,形成一个高质量且具有代表性的社区垃圾数据集,为后续的模型训练与评估奠定了坚实的基础。
设计思路
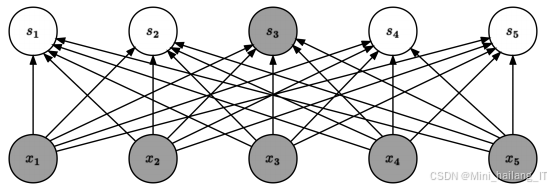
CNN是一种成功训练多层网络结构且具有鲁棒性的深度学习算法,能够学习大量输入与输出之间的映射关系,而无需任何数学表达式。相较于传统算法,CNN的特殊性体现在两个方面:一方面,神经元采用稀疏连接,意味着相邻各层的神经元节点只与其相近的上层神经元相连,减少了参数数量;另一方面,同一层的某些神经元间共享连接权重,这使得在提取图像特征时不需要考虑局部特征的位置,并在一定程度上降低了模型的参数量。
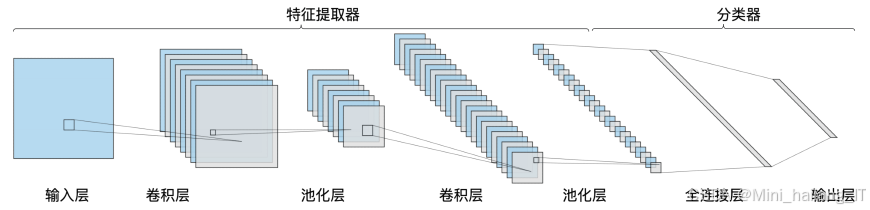
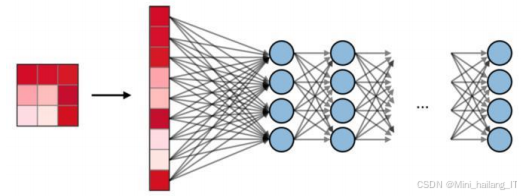
CNN主要由输入层、卷积层、池化层、全连接层和输出层五部分构成。根据功能,CNN可分为特征提取器和分类器。特征提取器包括输入层、卷积层和池化层,而分类器由全连接层和输出层组成。卷积层是构建CNN的核心层,主要用于提取输入数据的特征,计算量也主要来自卷积层。卷积层通过滑动小矩阵(卷积核或滤波器)对输入图像进行点乘求和,从而提取局部区域的特征值。为了避免在卷积操作中丢失原始图像的边缘信息,通常在进行卷积前采用填充(padding)技术。
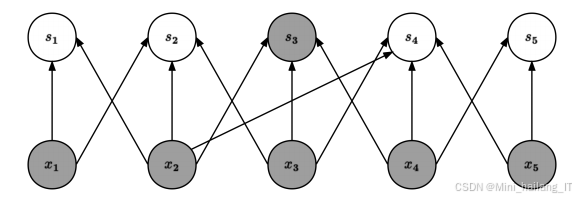
卷积层带来了稀疏连接和参数共享的两个重要改进。不同于全连接网络中每个节点与所有其他节点相连,卷积层的连接受卷积核大小的限制。参数共享使卷积层具备平移等变能力,即移动输入图像中的所有像素点时,卷积后的输出图像也会相应移动。池化层,也称为下采样层,通过池化函数对网络输出进行进一步调整,提取某区域最具代表性的特征,降低特征图的分辨率。池化函数可以分为最大池化、平均池化和求和池化,分别提取特征值的最大值、平均值和求和。
在CNN中,卷积层和池化层通常交替连接,以逐渐减少输出特征的大小,从而降低网络中的参数数量,避免过拟合。全连接层位于CNN的尾端,负责分类。一方面,全连接层汇总之前各层提取的特征,依据特征和对应的滤波器进行分类,将池化层的二维特征图展开为一维向量;另一方面,输出层的所有节点与全连接层的某个节点直接相连。因此,全连接层的作用是将最后一个池化层的输出与最终输出节点相连。
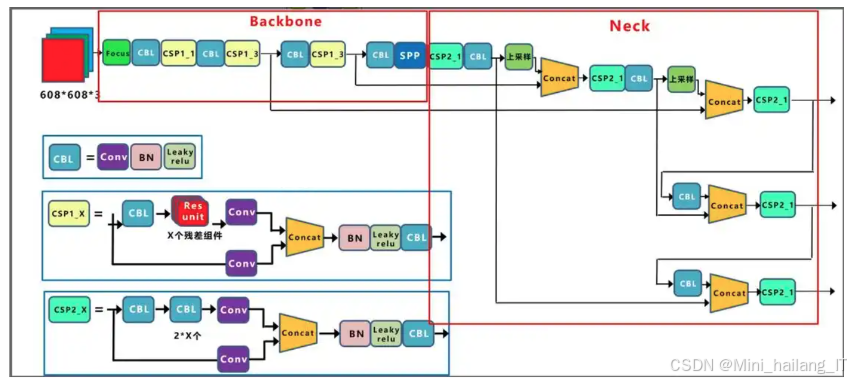
YOLOv5在目标检测领域的创新与改进使其成为一种高效且强大的算法,特别适合实时检测任务。其引入的自适应图片缩放功能显著提升了模型在处理不同尺寸图像时的表现,避免了在缩放过程中丢失关键信息,特别是小目标的特征。通过自适应灰度填充,YOLOv5能够在将图像缩放到416×416时有效保留特征,确保了模型的准确性。YOLOv5将传统独立的锚框计算模块集成到训练流程中,自动计算锚框,简化了用户的操作,节省了时间,提高了训练效率。YOLOv5采用了Focus结构,对三层下采样卷积进行了优化,减少了冗余计算和参数数量,显著提升了模型的速度和效率。这一设计加快了特征提取过程,降低了计算资源消耗。
深度学习框架为构建、训练、优化和推理深度神经网络提供了必要的基础工具,使开发者能够更高效地进行相关工作。这些框架不仅简化了复杂的计算过程,还提供了丰富的功能和灵活的接口,帮助开发者快速实现各种深度学习算法。在众多深度学习框架中,PyTorch因其高度的扩展性和可移植性而受到广泛欢迎,尤其在学术研究和工业应用中表现出色。它的动态计算图特性使得模型的调试和修改变得更加直观和方便,同时,PyTorch拥有一个活跃的开发者社区,提供了大量的资源和支持,极大地推动了深度学习的研究和应用。
数据准备包括数据的加载、清洗和增强。首先,从刚刚制作的社区垃圾数据集中加载图像和对应的标注信息,确保数据的完整性和准确性。接下来,对图像进行预处理,包括调整图像的大小、归一化处理以及数据增强。数据增强技术如随机旋转、缩放和翻转等,有助于增加样本的多样性,从而提高模型的泛化能力。预处理后的数据将用于后续的模型训练。
import cv2
import os
import numpy as np
from sklearn.model_selection import train_test_split
def load_and_preprocess_data(image_folder, mask_folder):
images, masks = [], []
for filename in os.listdir(image_folder):
if filename.endswith('.jpg'):
img = cv2.imread(os.path.join(image_folder, filename))
img = cv2.resize(img, (224, 224)) / 255.0 # 归一化
images.append(img)
mask = cv2.imread(os.path.join(mask_folder, filename.replace('.jpg', '_mask.png')), cv2.IMREAD_GRAYSCALE)
mask = cv2.resize(mask, (224, 224)) / 255.0
masks.append(mask)
return np.array(images), np.array(masks)
# 加载数据
images, masks = load_and_preprocess_data('images/', 'masks/')使用卷积神经网络(CNN)作为基础架构,或者更复杂的架构如U-Net或YOLOv5等,特别适用于图像分割和目标检测任务。模型构建包括定义输入层、卷积层、池化层、全连接层和输出层等。通过合理的层次设计,确保模型能够有效提取图像特征并进行分类或分割。还需要选择合适的激活函数、损失函数和优化器,以满足特定任务的需求。
import tensorflow as tf
from tensorflow.keras import layers, models
def build_model(input_shape):
inputs = layers.Input(shape=input_shape)
conv1 = layers.Conv2D(32, (3, 3), activation='relu', padding='same')(inputs)
pool1 = layers.MaxPooling2D(pool_size=(2, 2))(conv1)
conv2 = layers.Conv2D(64, (3, 3), activation='relu', padding='same')(pool1)
pool2 = layers.MaxPooling2D(pool_size=(2, 2))(conv2)
# 添加更多的卷积层...
outputs = layers.Conv2D(1, (1, 1), activation='sigmoid')(pool2) # 输出层
model = models.Model(inputs=[inputs], outputs=[outputs])
return model
# 构建模型
model = build_model((224, 224, 3))将准备好的数据分为训练集和验证集,并配置模型的训练参数。选择适当的损失函数,如二分类交叉熵或交叉熵损失,根据任务要求进行调整。使用优化器如Adam进行权重更新。在训练时,可以设置回调函数以监控训练过程,保存最佳模型并防止过拟合。训练过程通常会持续多个周期(epoch),并在每个周期结束时评估模型在验证集上的表现。
# 划分训练集和验证集
from sklearn.model_selection import train_test_split
X_train, X_val, y_train, y_val = train_test_split(images, masks, test_size=0.15, random_state=42)
# 编译模型
model.compile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy'])
# 训练模型
history = model.fit(X_train, y_train, validation_data=(X_val, y_val), epochs=50, batch_size=16)使用测试集计算模型的各种性能指标,如准确率、召回率和F1-score,并绘制混淆矩阵,以便直观展示模型的分类效果。根据评估结果,可能需要对模型进行优化,例如调整学习率、增加正则化或修改网络结构等。通过这些步骤,确保最终模型在实际应用中具备良好的性能和鲁棒性。
from sklearn.metrics import classification_report, confusion_matrix
import seaborn as sns
import matplotlib.pyplot as plt
# 进行评估
test_loss, test_accuracy = model.evaluate(X_test, y_test)
# 获取预测结果
predictions = model.predict(X_test)
predicted_classes = (predictions > 0.5).astype(np.uint8)
# 打印分类报告
print(classification_report(y_test.flatten(), predicted_classes.flatten()))
# 绘制混淆矩阵
cm = confusion_matrix(y_test.flatten(), predicted_classes.flatten())
sns.heatmap(cm, annot=True, fmt='d', cmap='Blues')
plt.xlabel('Predicted')
plt.ylabel('True')
plt.title('Confusion Matrix')
plt.show()海浪学长项目示例:




















 4343
4343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









